PlatROB: An open-source, modular, and low-cost hardware platform for mobile robotics and AI education
Jose Balbuena, Julio Sinche, Diego Quiroz, Diego Arce, Elizabeth Villota

TL;DR
PlatROB is a low-cost, open-source robotics platform designed to teach robotics and AI through hands-on learning and system integration.
Contribution
The novel contribution is a modular, affordable, and open-source educational robotics platform with validated performance and real-world deployment.
Findings
PlatROB modules achieved validated performance metrics such as 10 kg payload support and 120 min autonomy.
The platform was successfully used in educational settings with over 160 learners showing significant learning gains.
All design files and code are open-source to enable replication in resource-limited environments.
Abstract
This paper introduces PlatROB, an open-source, modular, and low-cost educational robotics platform designed to facilitate hands-on learning in robotics and AI through system integration. PlatROB comprises four 3D-printable, classroom-ready modules: an Ackermann Drive Module (ADM), an Omnidirectional/Differential Drive Module (ODM/DDM), a Control and Processing Module (CPM) with NVIDIA Jetson Nano, and a 4-DoF Articulated Manipulation Module (AMM). Inter-module communication uses standardized I2C over DB9 connectors, integrating Arduino microcontrollers, motor drivers, encoders, IMUs, and ultrasonic sensors. Module costs range from 341. Performance validation shows the ADM supports 10 kg payload, achieves 25 cm turning radius and has 120 min autonomy (3 kg load), while the CPM sustains 40–100 min operation depending on neural-network workloads. The AMM provides 450 g payload…
Click any figure to enlarge with its caption.
 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6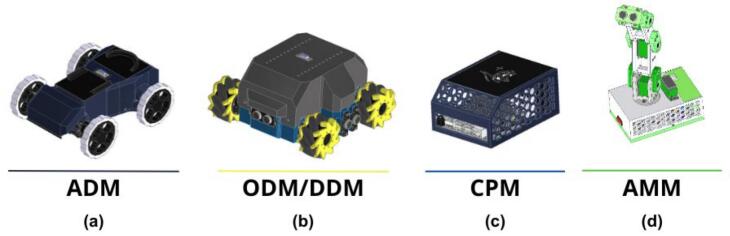 Figure 7
Figure 7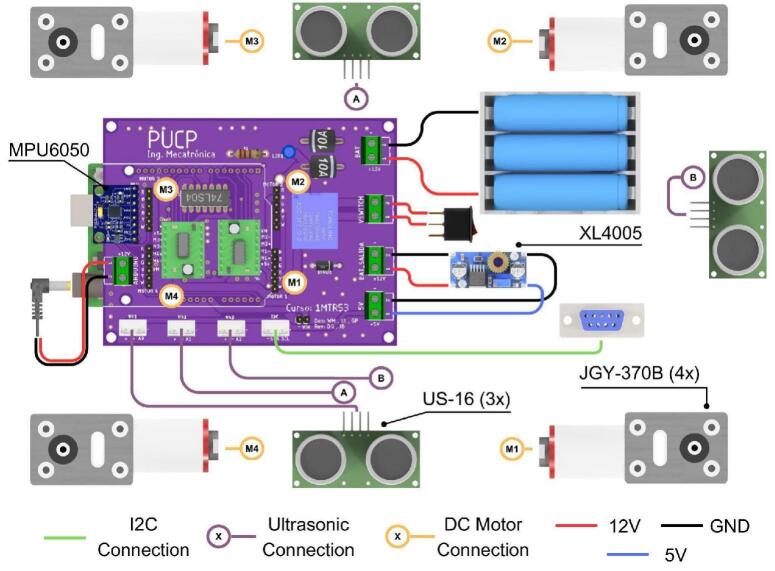 Figure 8
Figure 8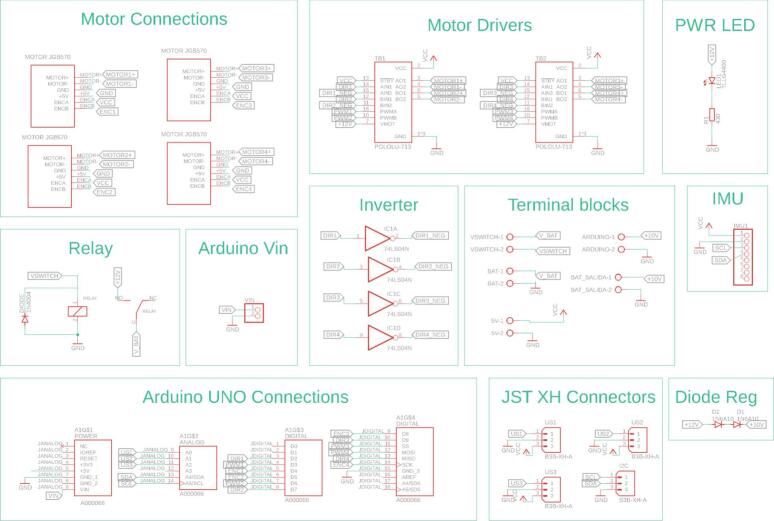 Figure 9
Figure 9 Figure 10
Figure 10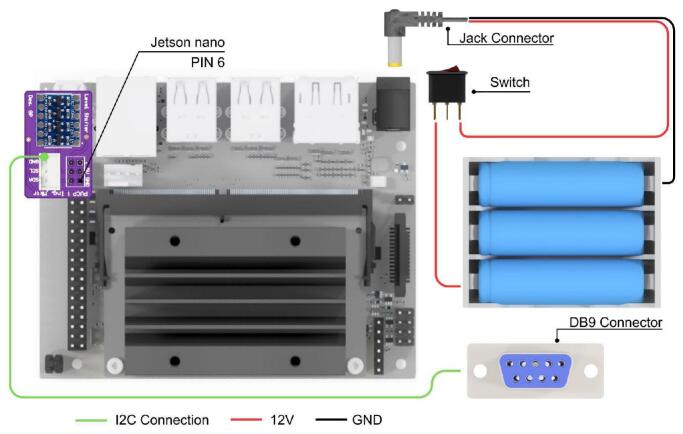 Figure 11
Figure 11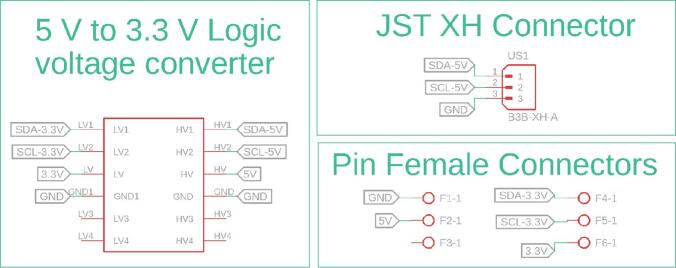 Figure 12
Figure 12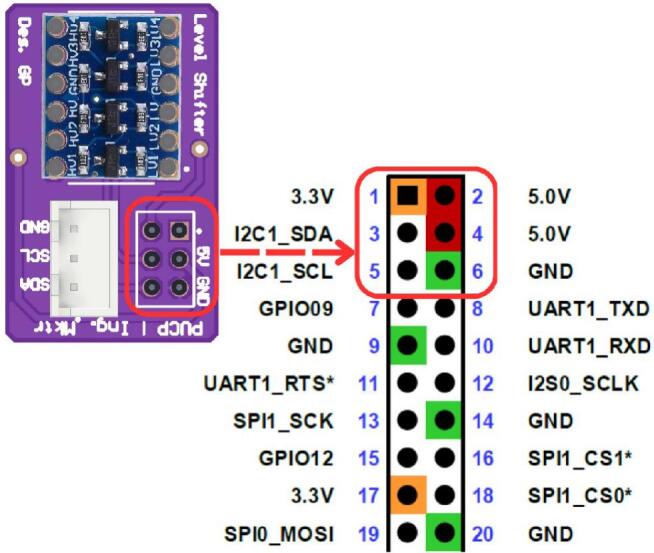 Figure 13
Figure 13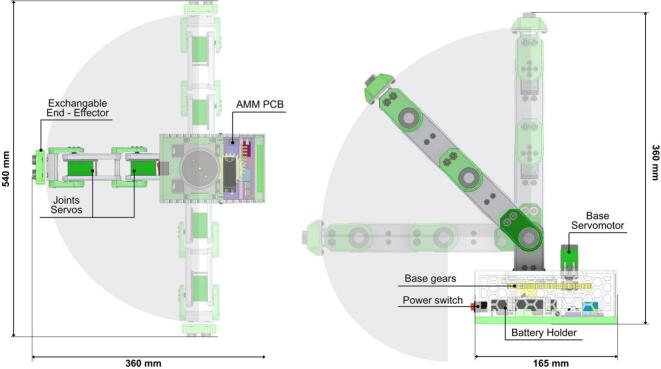 Figure 14
Figure 14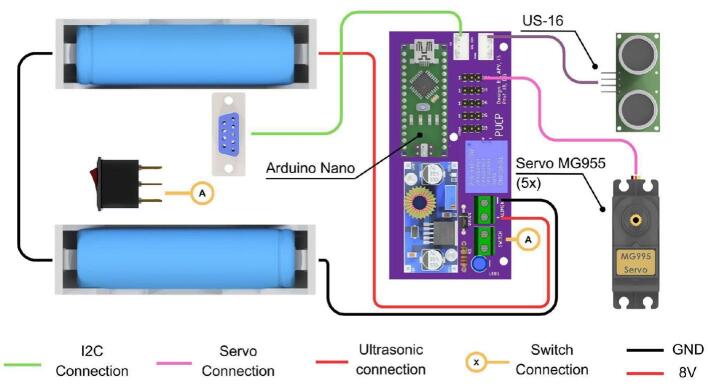 Figure 15
Figure 15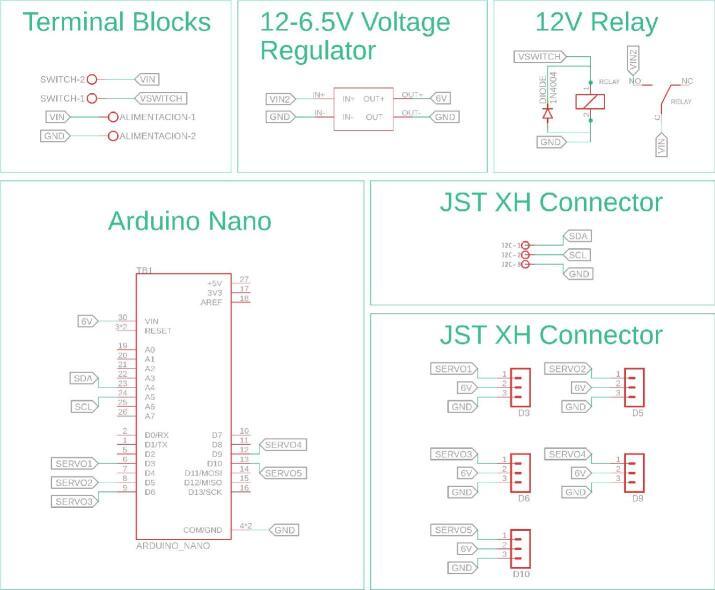 Figure 16
Figure 16 Figure 17
Figure 17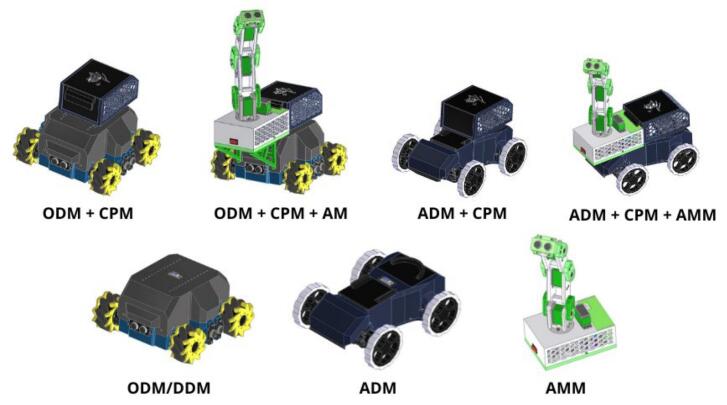 Figure 18
Figure 18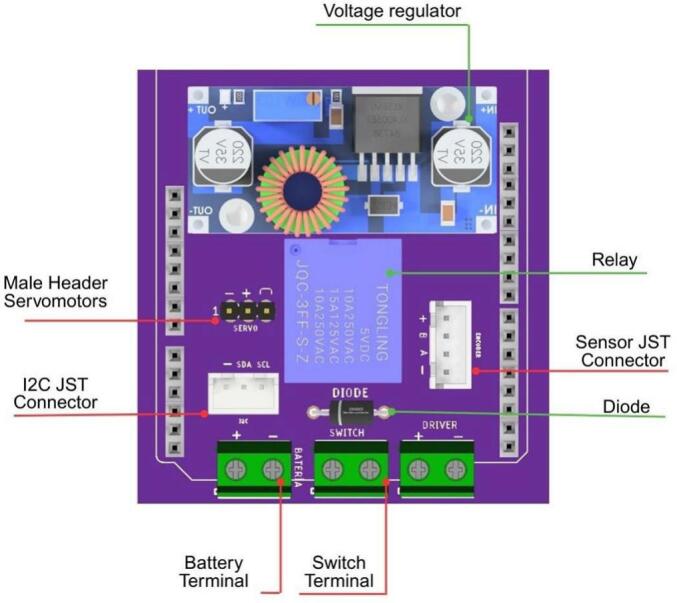 Figure 19
Figure 19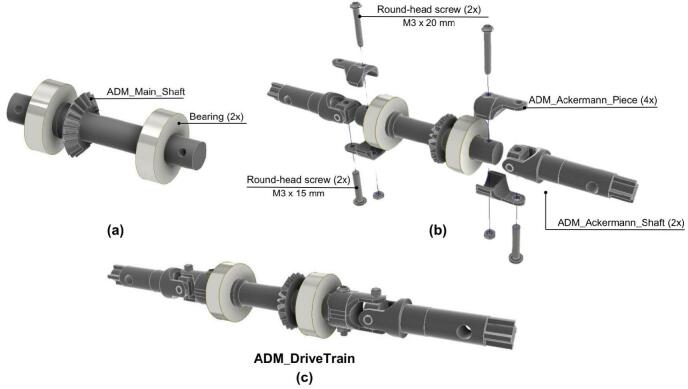 Figure 20
Figure 20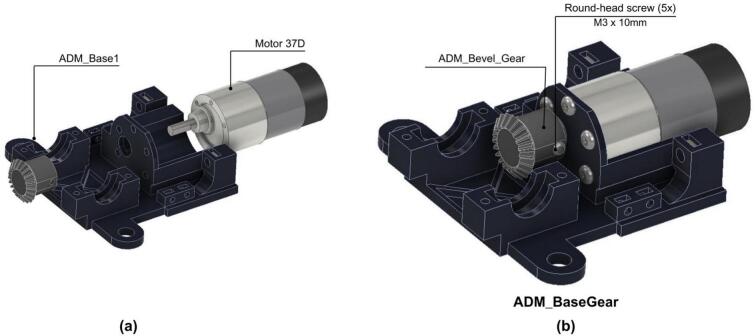 Figure 21
Figure 21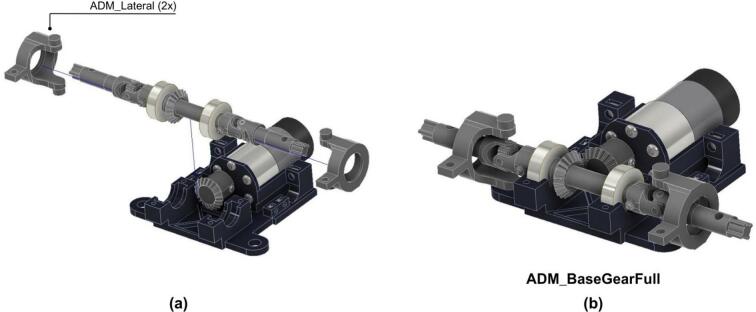 Figure 22
Figure 22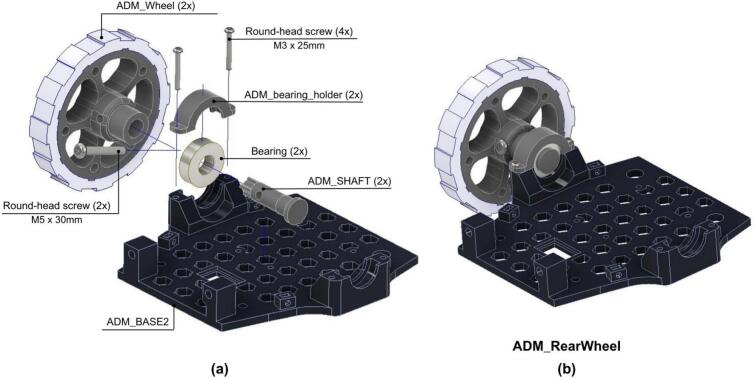 Figure 23
Figure 23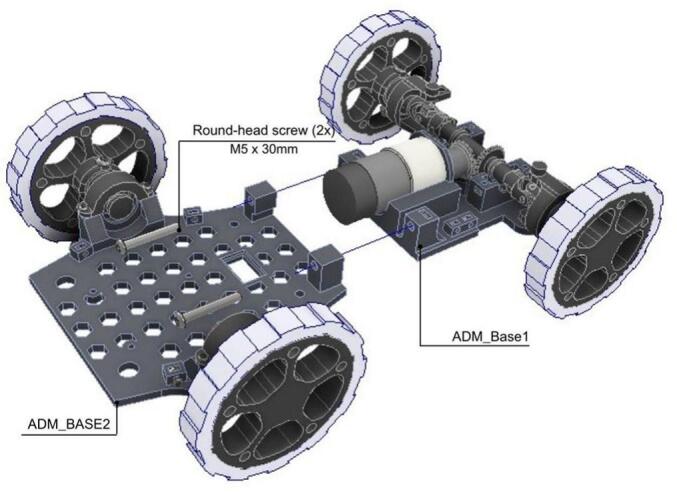 Figure 24
Figure 24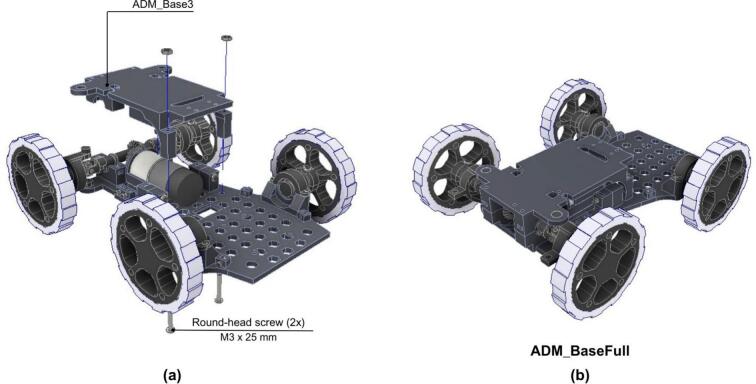 Figure 25
Figure 25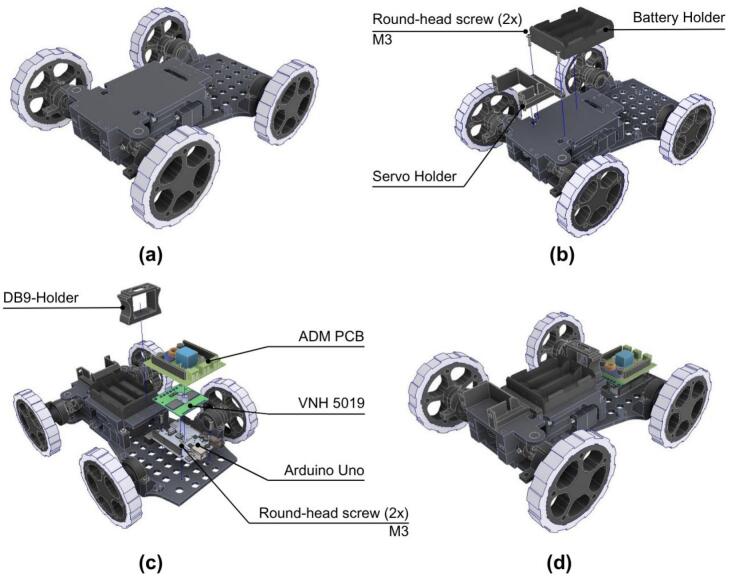 Figure 26
Figure 26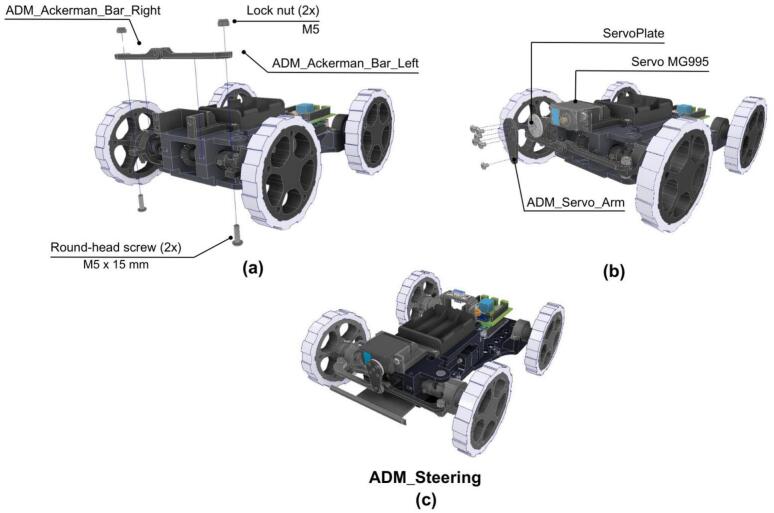 Figure 27
Figure 27 Figure 28
Figure 28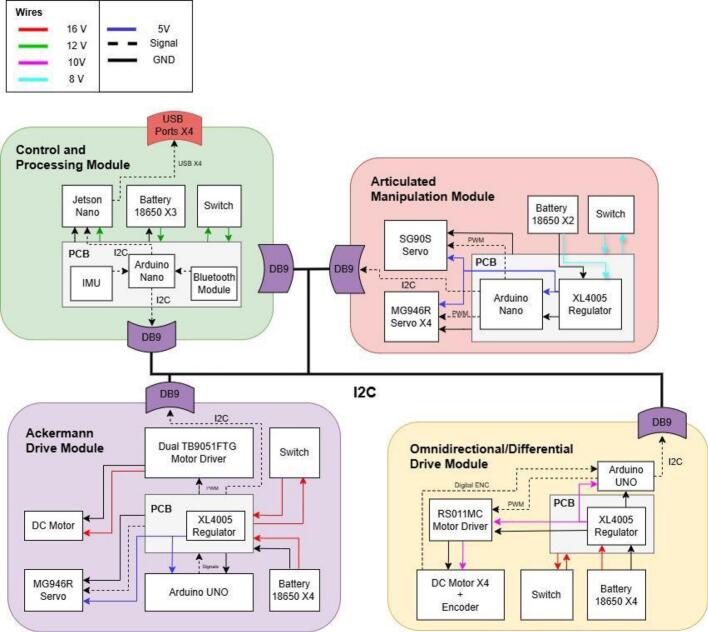 Figure 29
Figure 29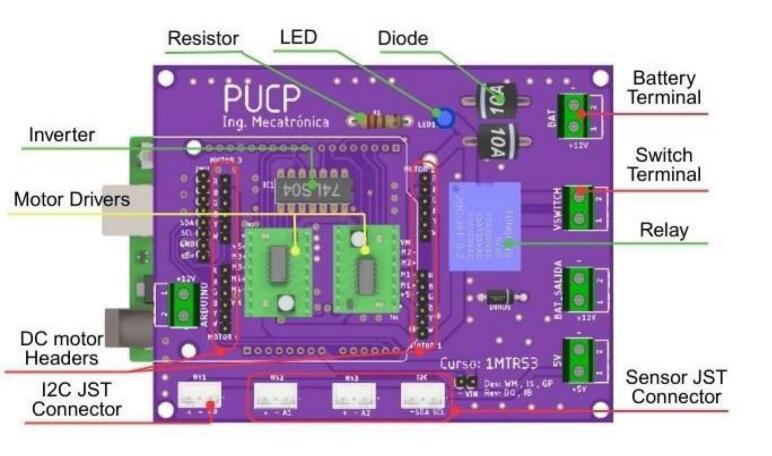 Figure 30
Figure 30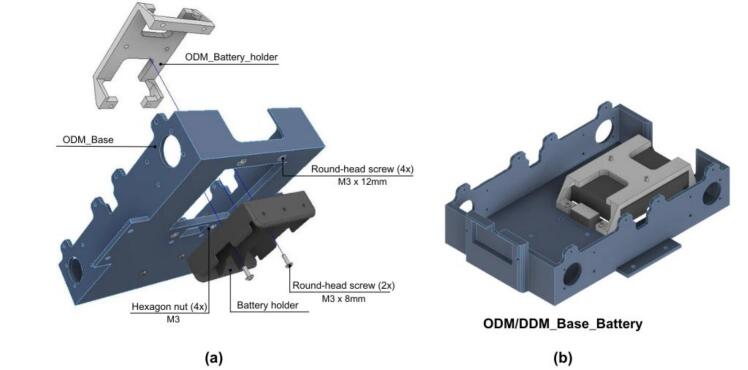 Figure 31
Figure 31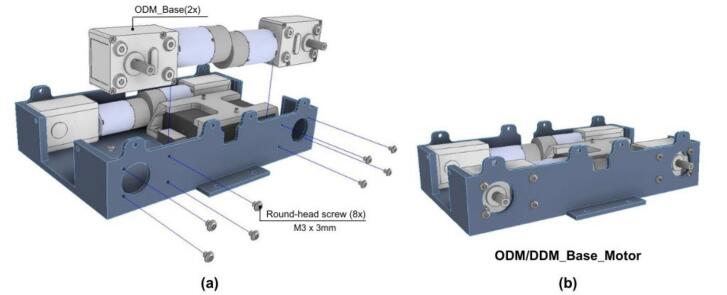 Figure 32
Figure 32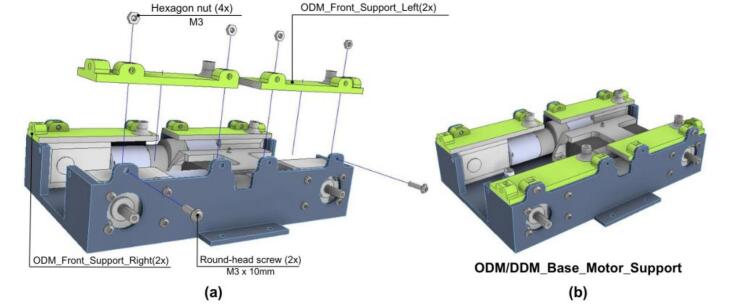 Figure 33
Figure 33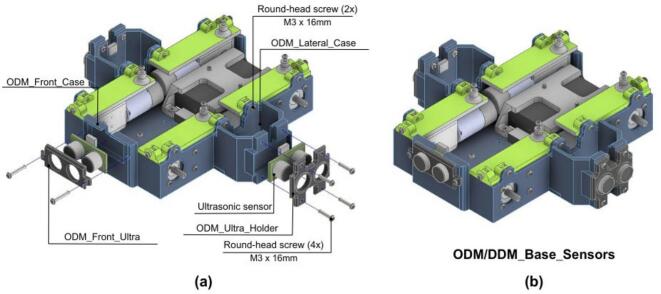 Figure 34
Figure 34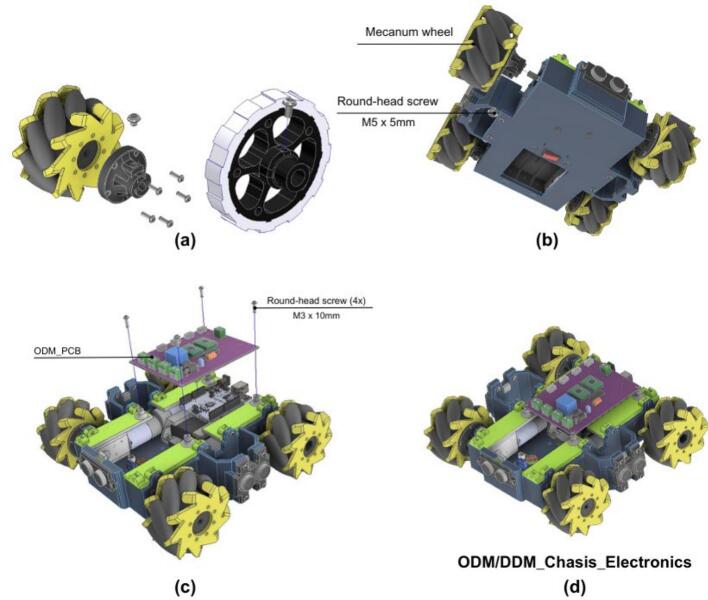 Figure 35
Figure 35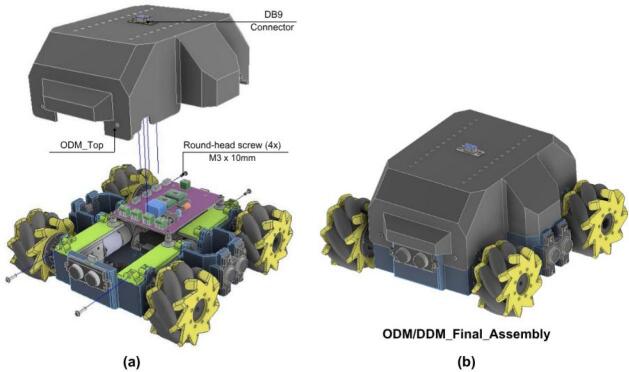 Figure 36
Figure 36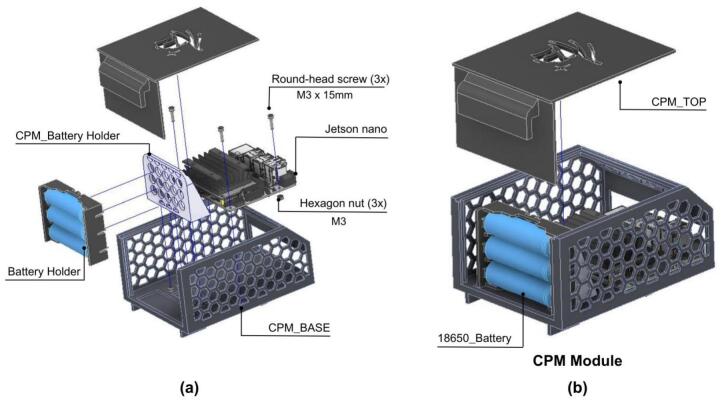 Figure 37
Figure 37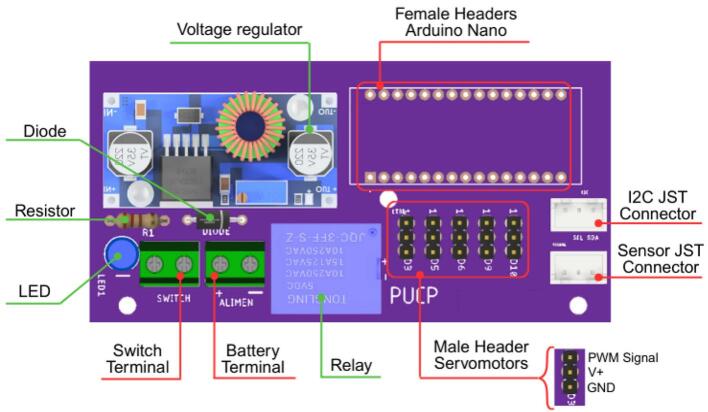 Figure 38
Figure 38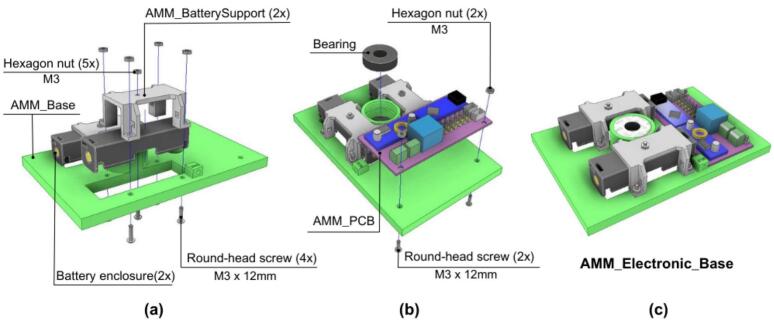 Figure 39
Figure 39 Figure 40
Figure 40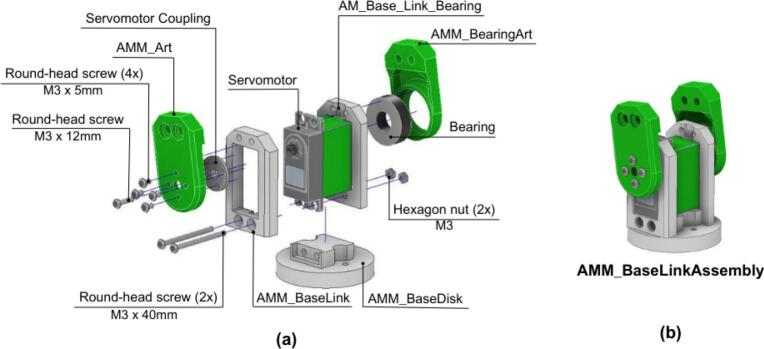 Figure 41
Figure 41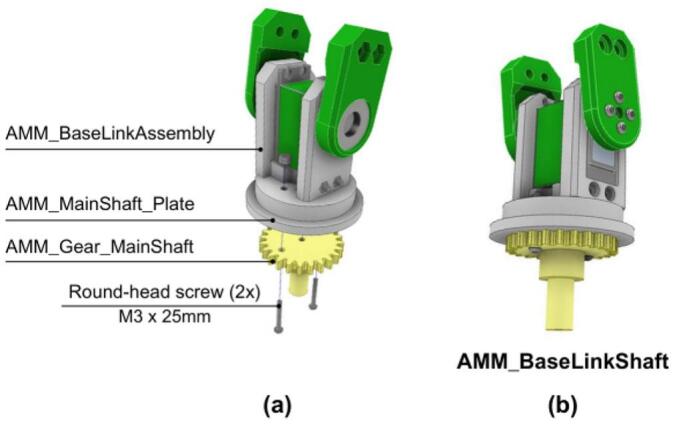 Figure 42
Figure 42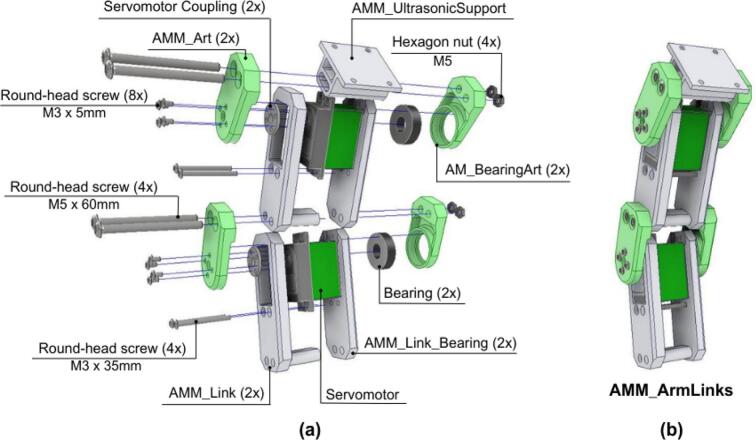 Figure 43
Figure 43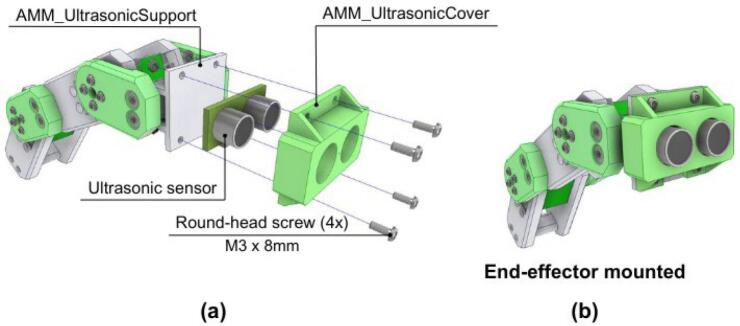 Figure 44
Figure 44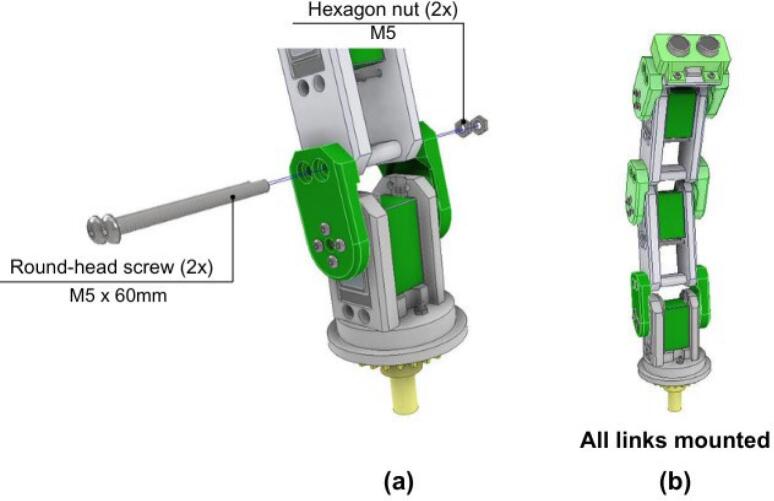 Figure 45
Figure 45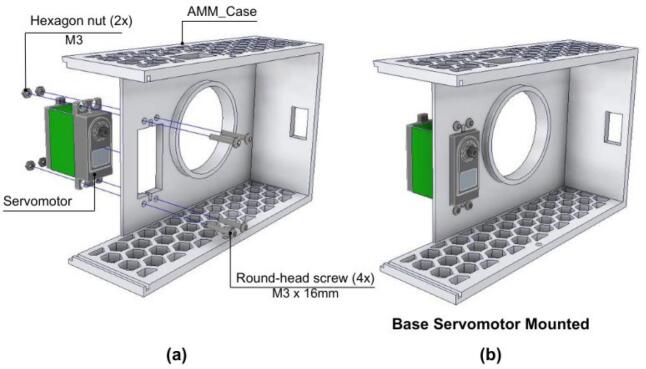 Figure 46
Figure 46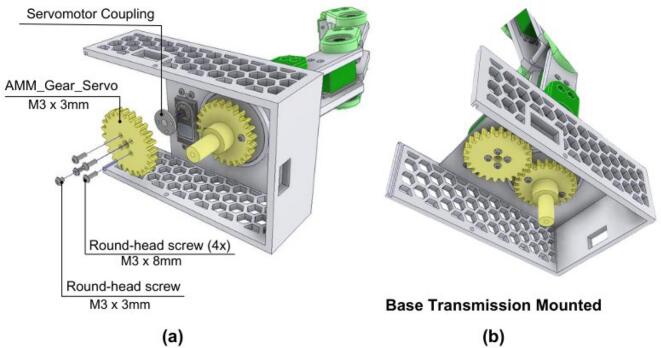 Figure 47
Figure 47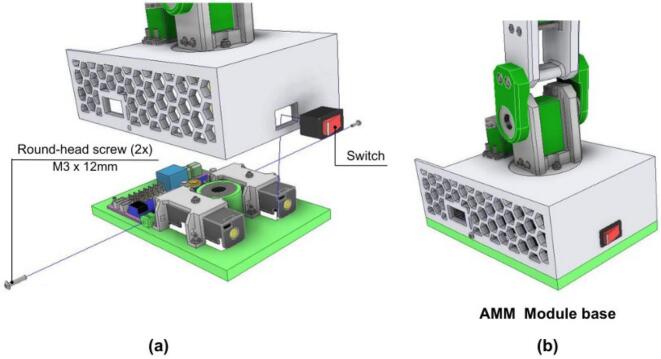 Figure 48
Figure 48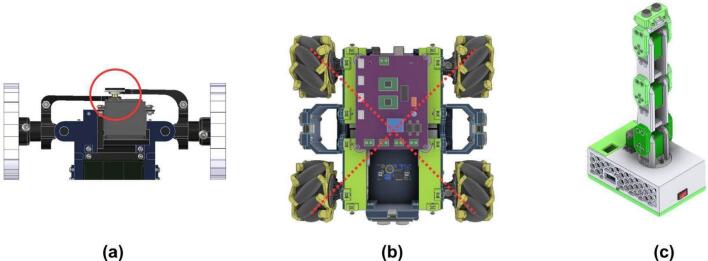 Figure 49
Figure 49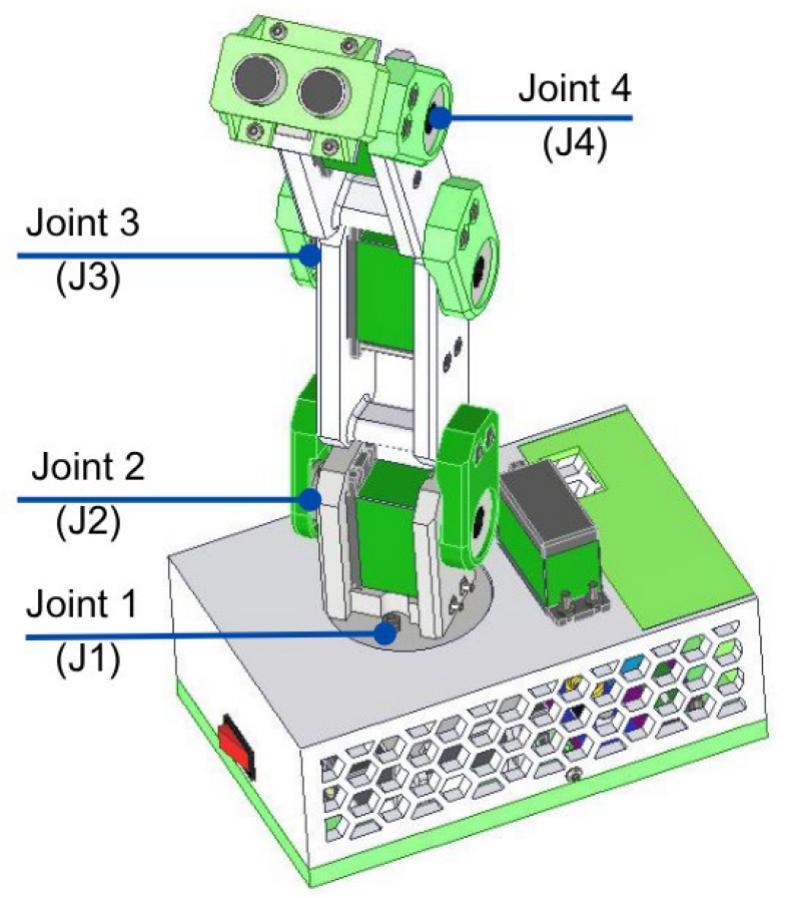 Figure 50
Figure 50Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsTeleoperation and Haptic Systems · Robot Manipulation and Learning · Robotics and Automated Systems