Transformer-based human-motion forecasting coupled with safe reinforcement learning for telepresence robot co-navigation
Heba G. Mohamed, Muhammad Nasir Khan, Fawad Naseer, Muhammad Tahir, Mohsin Jamil

TL;DR
This paper introduces a new framework for telepresence robots to safely navigate with humans in hospitals by predicting human motion and using safe reinforcement learning.
Contribution
The novel contribution is a modular framework combining transformer-based human-motion forecasting with a safety-aware reinforcement learning controller for telepresence robots.
Findings
The proposed method improved task success by 21.6% and reduced collisions by 47.3% compared to baselines.
Median minimum human–robot clearance increased by 0.19 m and near-miss events decreased by 38.5%.
Ablation studies showed that removing forecasting or the CBF shield significantly degraded performance and safety.
Abstract
Telepresence robots (TPRs) must co-navigate with humans in constrained hospital environments, where safety depends on anticipating rather than merely reacting to human motion. Existing approaches rarely integrate short-horizon human-motion forecasting with safety-constrained control, which reduces robustness in dense corridors and ward bays. This study addresses this gap by evaluating an anticipatory, safety-aware co-navigation framework for TPRs. We developed a modular framework that couples a lightweight transformer-based forecaster that predicts multi-agent trajectories under occlusion with a safe reinforcement learning (RL) controller. The forecaster produces short-term distributions over pedestrian states that are embedded into the RL policy state and cost as risk-aware occupancy features. Safety is enforced via constrained policy optimization augmented by a run-time control…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
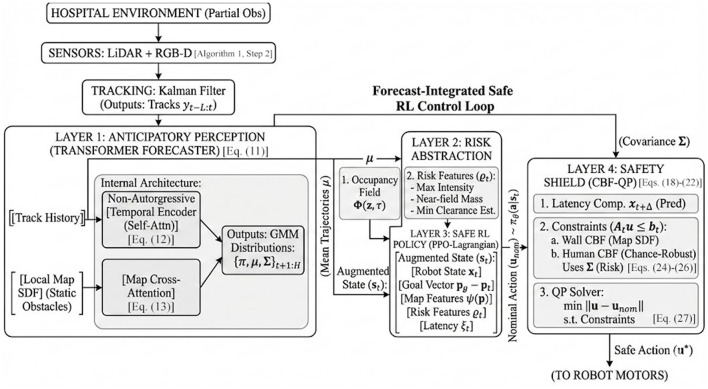 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4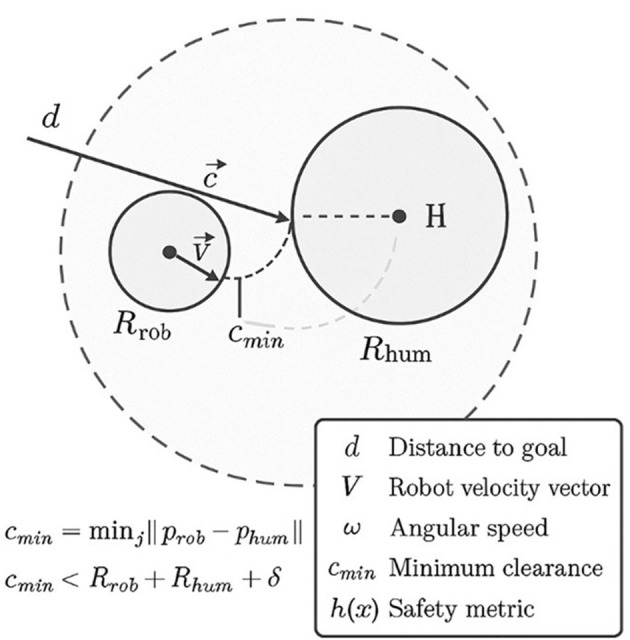 Figure 5
Figure 5 Figure 6
Figure 6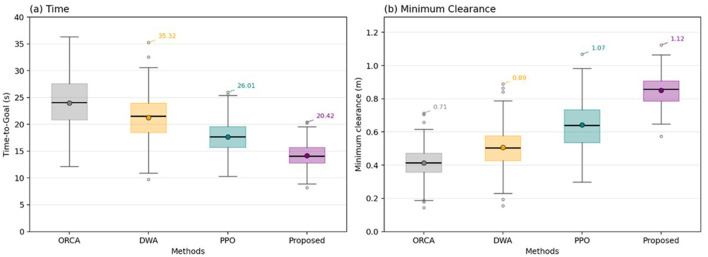 Figure 7
Figure 7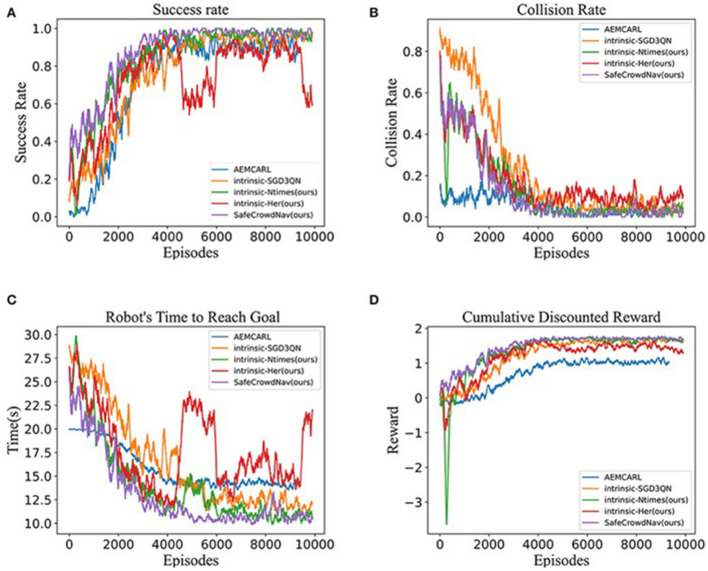 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12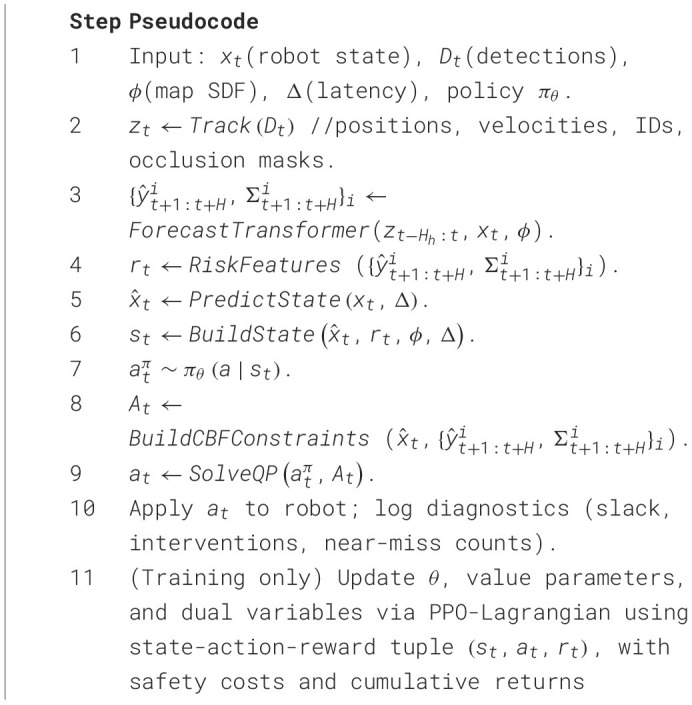 Figure 13
Figure 13Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsSocial Robot Interaction and HRI · Teleoperation and Haptic Systems · Evacuation and Crowd Dynamics