A Review of Wireless Charging Solutions for FANETs in IoT-Enabled Smart Environments
Nelofar Aslam, Hongyu Wang, Hamada Esmaiel, Naveed Ur Rehman Junejo, Adel Agamy

TL;DR
This paper reviews wireless charging solutions for UAVs in FANETs to improve their endurance in IoT-enabled smart environments.
Contribution
The paper provides a comprehensive review of wireless power transfer methods for UAVs in FANETs, emphasizing in-flight charging and IoT integration.
Findings
In-flight UAV charging can extend endurance by three times compared to standalone batteries.
Existing systems face scalability issues beyond 20 UAVs.
Future research should focus on edge computing and blockchain for energy trading.
Abstract
Unmanned Aerial Vehicles (UAVs) are emerging as a fundamental part of Flying Ad Hoc Networks (FANETs). However, owing to the limited energy capacity of UAV batteries, wireless power transfer (WPT) technologies have recently gained interest from researchers, offering recharging possibilities for FANETs. Based on this background, this study highlights the need for wireless charging to enhance the operational endurance of FANETs in Internet-of-Things (IoT) environments. This review investigates WPT power replenishment to explore the dynamic usage of UAVs in two ways. The former is for using a UAV as a mobile charger to recharge the ground nodes, whereas the latter is for WPT applications in in-flight (UAV-to-UAV) charging. For the two research domains, we describe the different methods of WPT and its latest advancements through the academic and industrial research literature. We…
Click any figure to enlarge with its caption.
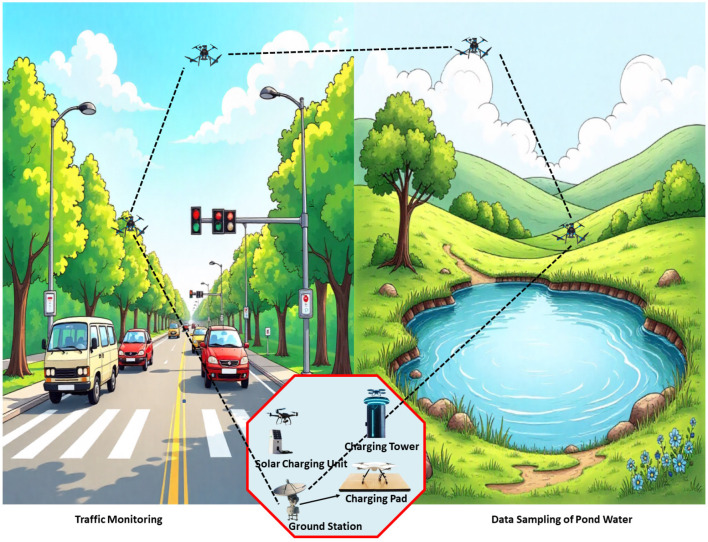 Figure 1
Figure 1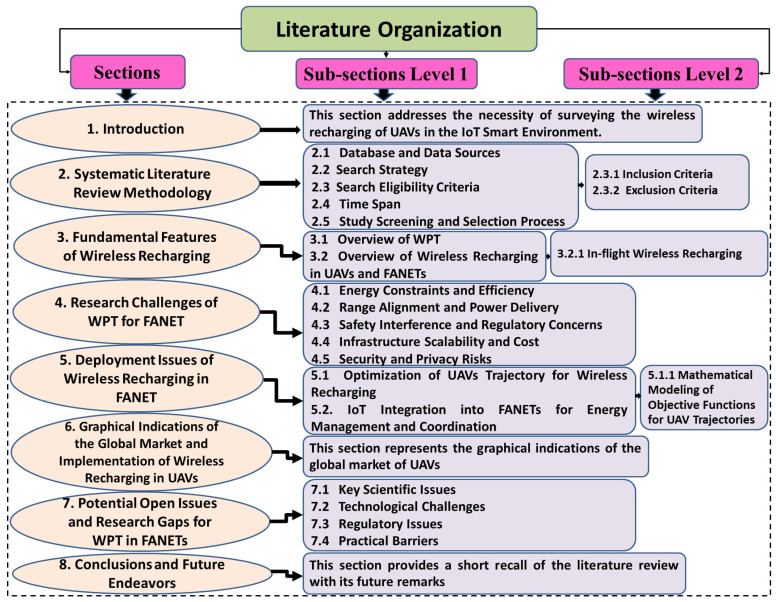 Figure 2
Figure 2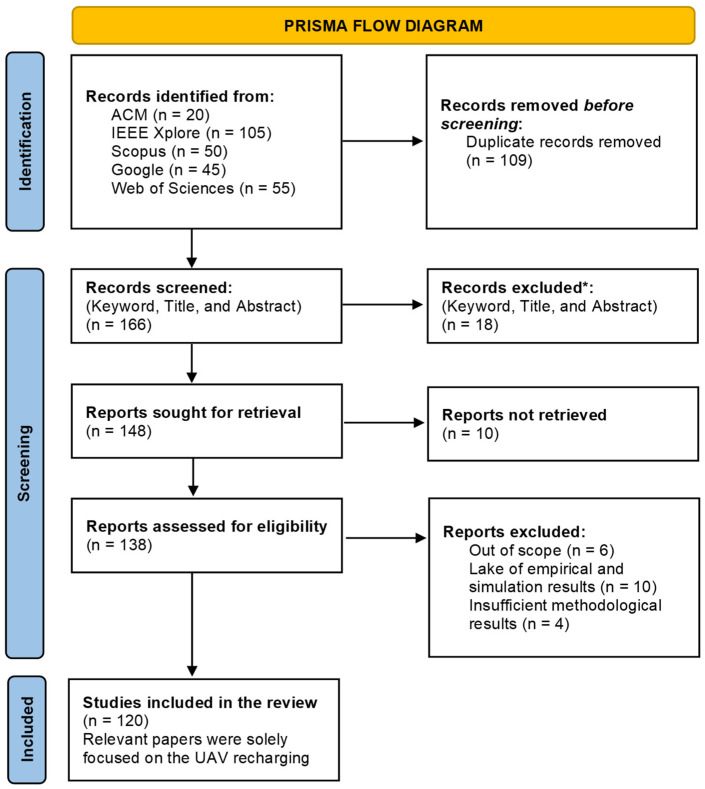 Figure 3
Figure 3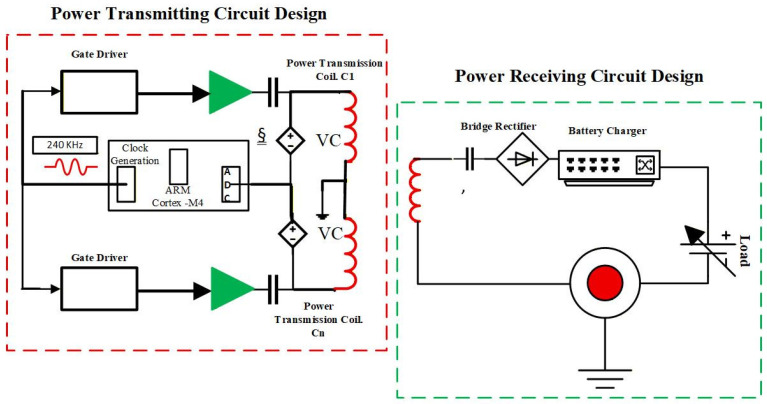 Figure 4
Figure 4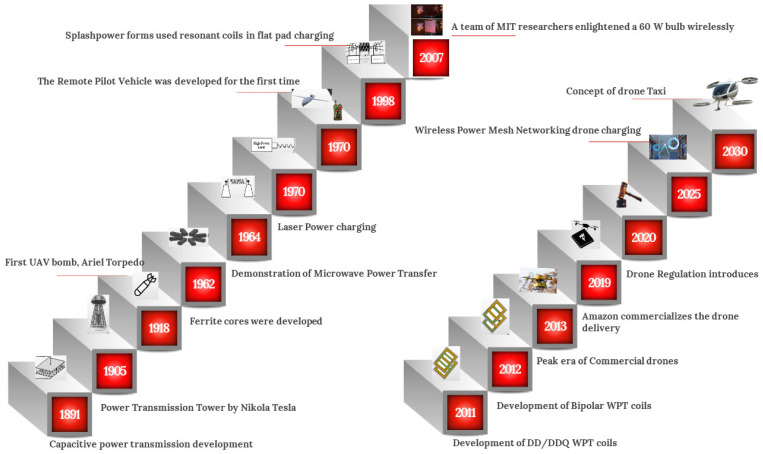 Figure 5
Figure 5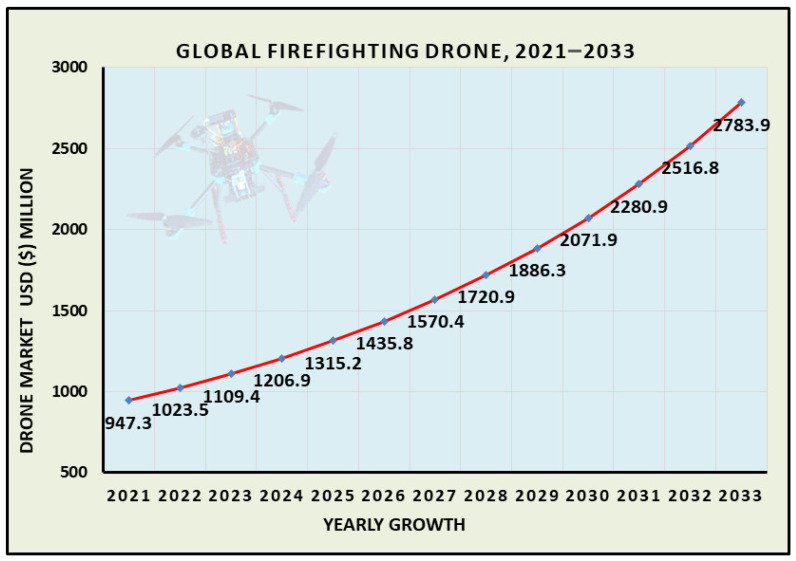 Figure 6
Figure 6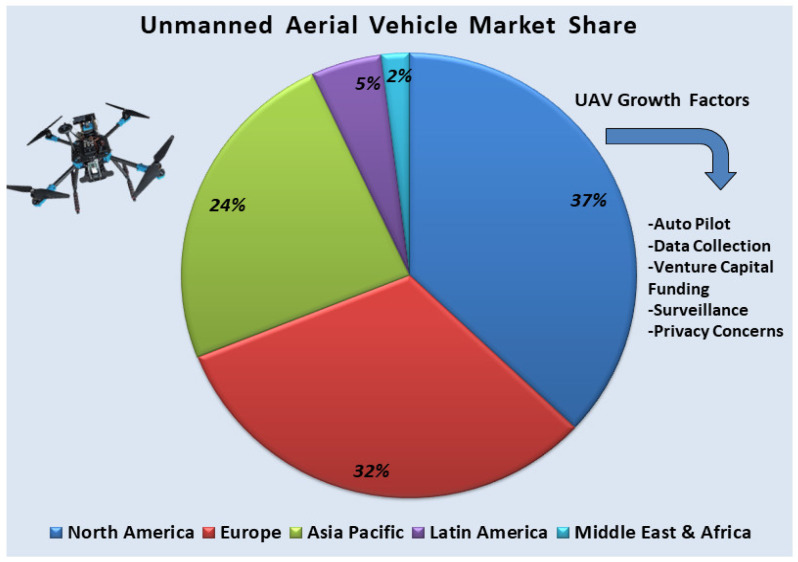 Figure 7
Figure 7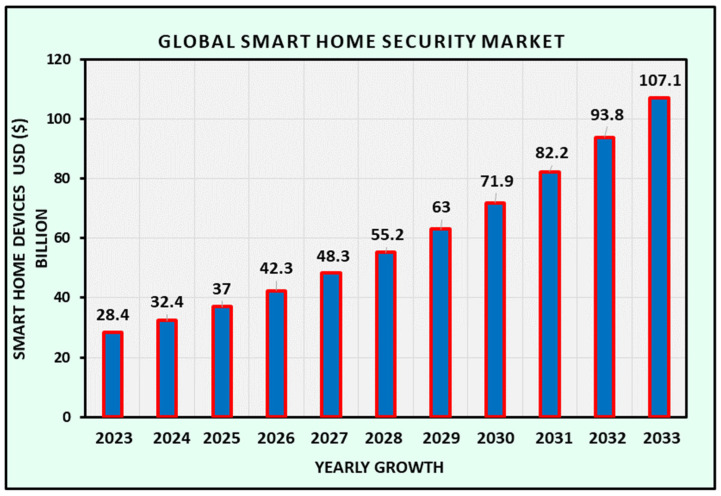 Figure 8
Figure 8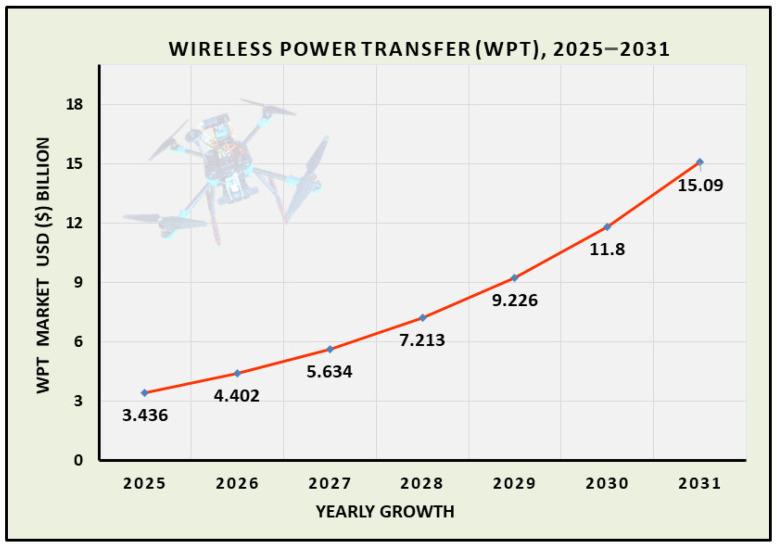 Figure 9
Figure 9- —Deanship of Research and Graduate Studies at King Khalid University
Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsUAV Applications and Optimization · Energy Harvesting in Wireless Networks · Wireless Power Transfer Systems
1. Introduction
Flying Ad Hoc Networks (FANETs) are self-organizing networks formed by Unmanned Aerial Vehicles (UAVs) that communicate wirelessly in a dynamic topology infrastructure [1,2]. FANETs are rapidly gaining prominence across various sectors, including smart cities [3,4,5], agriculture [6], logistics [7], healthcare [8,9], military surveillance [10], and disaster response [11,12,13]. As mobile nodes are capable of flexible deployment and autonomous operation in adverse and dynamic conditions, FANETs play a crucial role in modern IoT ecosystems by enabling real-time data collection, infrastructure monitoring, and situational awareness [14,15]. Unlike Mobile Ad Hoc Networks (MANETs) or Vehicular Ad Hoc Networks (VANETs), FANETs operate in 3D airspace, experience more frequent topology changes, and require fast response times [16], as in a FANET, these interconnected small UAVs are capable of communicating data between each other and with the base station (BS) [17]. An IoT-integrated FANET application is shown in Figure 1.
However, their operational efficiency is significantly dependent on their limited onboard battery capacity, making energy management a central challenge in the design and deployment of FANETs [18]. Ineffective energy management in traditional FANETs results in limited onboard energy, leading to the mismanagement of mobility, latency constraints, and bandwidth limitations, all of which significantly affect vehicle capabilities. Most traditional UAVs operate on a confined battery life (typically 20–60 min) [19], restricting the mission duration and radius from the base within which the vehicle can operate. Traditional battery-dependent models lead to frequent interruptions, reduced mission times, scalability issues, and logistical challenges associated with recharging or replacing batteries [20]. Wireless charging technologies, ranging from static ground-based systems to dynamic in-flight energy transfer, are emerging as promising solutions for extending the operational endurance of UAVs in FANETs when managed intelligently [21].
Wireless power transfer (WPT) technologies have become increasingly relevant in overcoming the energy limitations faced by UAVs, particularly in the context of FANETs operating within smart environments. Several WPT methods have been explored for UAV applications, each with distinct operational characteristics [22]. Inductive coupling offers high efficiency over short distances and is well-suited for static charging stations, such as landing pads, although it requires precise alignment [23]. Resonant inductive coupling builds on this by allowing more flexible alignment and greater transmission distances, making it more adaptable to real-world UAV deployment scenarios [22,23]. Microwave power transfer (MPT) enables in-flight charging through directed electromagnetic beams, offering the potential for continuous operation, although it requires accurate beam tracking and raises safety concerns [24]. Similarly, laser-based power transfer enables high-energy wireless charging over long distances using focused laser beams and onboard photovoltaic receivers, supporting uninterrupted flight but requiring a clear line of sight and presenting challenges related to safety and weather sensitivity [25].
By enabling in-flight energy replenishment, they reduce the need for human intervention and support longer or continuous UAV operations [26]. Nevertheless, without intelligent coordination, these systems may lead to incompetence in charge scheduling, increased UAV downtime, and unbalanced energy consumption across the networks. IoT integration is a critical enabler, particularly in dynamic environments with adverse conditions that can significantly impact system performance [27]. When combined with IoT-enabled communication, sensing, and control frameworks, WPT technologies can be optimally managed to ensure balanced energy distribution, predictive maintenance, and mission-aware scheduling. Ultimately, this enhances the endurance, resilience, and autonomy of FANET operations [28].
Coordinated energy management plays a critical role in maintaining operational continuity and system resilience in swarm and multi-UAV systems within FANETs. One key strategy is coordinated wireless charging, in which UAVs collaboratively manage energy resources through structured scheduling and role-based behaviors [29]. For instance, master–slave refueling models allow certain UAVs with higher energy reserves or designated energy-harvesting capabilities to temporarily act as mobile charging nodes for others [5], reducing the need for all units to return to static charging stations. Additionally, IoT-enabled intellectual scheduling algorithms and real-time data sharing can optimize flight paths, assign charging priorities, and coordinate mission handovers to minimize downtime and energy waste. Such coordination is particularly important in time-sensitive or large-scale missions in which continuous aerial coverage is essential. By leveraging swarm intelligence and distributed decision-making, coordinated charging not only enhances the endurance of individual UAVs but also improves the overall efficiency, robustness, and autonomy of FANETs [4]. IoT technologies, including sensor networks, cloud-based analytics, and low-latency communication protocols, can facilitate the smart coordination of wireless charging processes [30]. Through real-time data acquisition, energy-aware task allocation, and predictive maintenance, IoT platforms enable adaptive energy management that aligns with optimizing charging schedules, dynamic mission coordination requirements, and environmental conditions [31,32] with system design.
Most existing studies either focus on wireless charging techniques or IoT-based UAV coordination without holistically addressing how IoT can enhance energy management and smart charging in FANETs [33]. This lack of incorporation in the literature highlights the need for a systematic review to assess the current state of the art, synthesize existing approaches, and identify opportunities for future innovations.
This review explores how the convergence of IoT and wireless charging enhances the energy efficiency, autonomy, and scalability of FANETs. It focuses on the current trends of on-ground and in-flight wireless recharging of UAVs, as well as the deployment issues of wireless recharging in FANETs. In addition, numerous challenges associated with deploying WPT within FANETs have been explored, including energy efficiency, range alignment, power delivery, infrastructure scalability cost, security, and privacy risks. The scope of this study comprises a discussion of wireless charging mechanisms, IoT-based control frameworks, UAV trajectory optimization, and future research directions at the intersection of FANETs, IoT, and wireless power transfer.
The main objective of this systematic literature review is to investigate how IoT technologies support and enhance wireless charging for FANETs in various applications. To guide this review, the following research questions (RQs) were addressed based on its objectives:
- What are the existing methods and architectures for wireless charging technologies for IoT-enabled FANETs? How do they perform in testing compared with the traditional charging of FANETs?
- How has the WPT evolved to recharge UAVs and FANETs as well?
- What are the existing systems and demonstrations of WPT in UAVs?
- What is the role of IoT in optimizing UAV trajectories that are employed as wireless chargers in FANETs?
- What are the current challenges, limitations, and open research gaps in deploying wireless charging in FANETs?
- How is IoT integrated into FANETs for energy management and coordination?
The key contributions of this review are as follows:
- This review provides a comprehensive synthesis of existing research on the integration of IoT technologies with wireless charging solutions for FANETs. By bridging diverse but interconnected fields, including wireless networking, energy management, UAV control, and smart environments, a multidisciplinary perspective on this state-of-the-art technology can be provided.
- It also identifies and classifies the primary technological approaches and system architectures currently employed in the field. In doing so, it highlights application-specific innovations across a range of domains, including precision agriculture, disaster response, and urban infrastructure. These findings demonstrate the practical relevance and growing interest in deploying IoT-enabled FANETs for energy-intensive missions in real-world scenarios.
- Furthermore, this review critically examines the current limitations of the literature, drawing attention to persistent research gaps related to energy efficiency, interoperability, scalability, and cybersecurity. By analyzing these challenges, we provide a foundation for future research to address the pressing technical and operational barriers.
- In addition to mapping the existing research landscape, this review offers comparative evaluations and design insights that can inform the development of more integrated and efficient systems in the future. The study concludes with strategic recommendations for advancing the integration of IoT and wireless charging in dynamic FANET environments. This study serves as a valuable reference for researchers and practitioners seeking to develop resilient, scalable, and autonomous UAV systems capable of sustained operation in energy-constrained and mission-critical settings.
The remainder of this paper is organized as follows. Section 2 outlines the methodology of the systematic literature review. Section 3 elaborates on the fundamental features of wireless recharging. Section 4 focuses on the research challenges of WPT for FANETs. Section 5 discusses the deployment issues of wireless recharging in FANETs. Section 6 presents graphical representations of the global UAV market and the implementation of wireless recharging in UAVs. Section 7 elaborates on the potential open issues and research gaps for WPT in FANETs. Finally, Section 8 concludes the paper and summarizes the future work.
The complete survey organization is shown in Figure 2.
2. Systematic Literature Review Methodology
This work conducts a comprehensive literature review to identify peer-reviewed studies on wireless charging solutions for FANETs in IoT-enabled smart environments. The review methodology followed the well-established guidance of the PRISMA recommendations [34].
Probing deeper to ensure the transparency of the systematic literature review (SLP), a structured outline about computing and software engineering was also tracked during the entire research [35].
2.1. Databases and Data Sources
The literature review involved a search across a selection of academic electronic databases, including IEEE Xplore, Scopus, Web of Science, Google, and the ACM Digital Library. These databases were selected because of their extensive range of high-impact publications in the fields of computer science, networking, and UAVs.
2.2. Search Strategy
Both manual and automated search strategies were used to collect relevant studies. The search string was crafted through an iterative procedure using Boolean operators (OR, AND) and customized to fix the syntax of each database. The primary core domains included: UAV/drone/FANET and wireless charging/energy harvesting/in-flight wireless recharging/charging station/UAV trajectory optimization and Internet of Things/IoT and Flying Ad Hoc Networks, which were applied to keywords, titles, and abstracts.
KEY-TITLE-ABS ((“UAV” OR “Drone” OR “FANET”) AND (“Wireless Charging” OR “Energy Harvesting” OR “In-flight Wireless Recharging” OR “Charging Station” OR “UAV Trajectory Optimization”) AND (“IoT” OR “Internet of Things”) AND (“Flying Ad Hoc Network”))
The first part of the string (UAV, drone, FANET) depends on the middle part of the string (wireless charging, energy harvesting, in-flight wireless recharging, charging station, UAV trajectory optimization), along with its application in the last part of the string (IoT, Internet of Things, Flying Ad Hoc Networks).
2.3. Search Eligibility Criteria
2.3.1. Inclusion Criteria
The primary search counted in the peer-reviewed journal articles, scholarly books, and full conference proceedingsResearch study that specifically investigates the wireless charging methods for UAVs in FANETs under IoT smart environmentsEmpirical results of simulation, trajectory optimization algorithms/methods evaluation, and their mathematical modelingFull articles written in EnglishArticles published after 2011
2.3.2. Exclusion Criteria
Non-peer-reviewed sources such as blogs, preprints, white papers, non-scholarly publications, non-scholarly books, meta-analyses, and editorialsThe study does not primarily address the wireless charging of UAVs in FANETs under IoT smart environmentsDuplicate records of the articlesPapers that are solely theoretical or conceptual without any form of evaluation, as well as previous versions of the same research
2.4. Time Span
The literature spanning from 2011 to 2025 examines the progression of wireless UAV recharging within FANETs/IoT, highlighting significant advancements in wireless recharging and IoT integration.
2.5. Study Screening and Selection Process
Identification: The initial database search retrieved a total of 275 records, with 20 from ACM, 105 from IEEE Xplore, 50 from Scopus, 45 from Google, and 55 from the Web of Science Digital Library.Duplication Removal: At this phase, 109 duplicate records were removed to obtain 166 unique entries for the next step.Screening: The keywords, titles, and abstracts of the remaining 166 records were reviewed to screen the 18 records.Eligibility Assessment Criteria: During this step, 10 records were removed as they failed to satisfy the eligibility criteria, resulting in 138 articles being selected for full-text evaluation. Among these, 18 were excluded for the following primary reasons: 6 were out of scope, 8 lacked empirical or simulation results, and 4 had insufficient methodological details.Final Selection: The final selection of relevant studies consisted of 120 papers, which were incorporated into the qualitative review.
All PRISMA workflow processes and screening methods are demonstrated in Figure 3.
3. Fundamental Features of Wireless Charging
3.1. Overview of WPT
Wireless power transfer is classified into two main categories based on the distance over which power is transmitted. For power transfer that is efficient over distances shorter than one meter, near-field transmission methods such as Capacitive Power Transfer (CPT), Inductive Power Transfer (IPT), and magnetic resonant coupling (MRC) are applied. Conversely, for power transmission over greater distances, far-field techniques such as laser-based charging and microwave power transfer (MPT) are utilized. A broad overview of the WPT technology literature is provided in Table 1.
The concept of transmitting power wirelessly through air is not novel and has captivated scientists worldwide since the dawn of the 20th century. In 1905, Nikola Tesla obtained a patent for a device designed to transmit intelligible signals or power through a natural medium [53]. This idea has fueled a century-long quest to advance wireless power transfer technology. In 2007, Andre Kurs and his colleagues at the Massachusetts Institute of Technology (MIT) achieved a breakthrough by wirelessly transferring 60 W of power to light up a bulb, heralding the advent of WiTricity [54].
Therefore, the basic power transmission and receiving circuit design can be understood from Figure 4.
A comparison of the WPT method clearly demonstrates the early research on WPT. Table 2 lists the near-field and far-field WPT methods.
3.2. Overview of Wireless Recharging in UAVs and FANETs
Energy constraints introduce another layer of complexity that is directly linked to both stability and obstacle avoidance. UAVs are inherently limited by the installed battery capacity, and frequent evasive maneuvers or extended network relaying can accelerate energy depletion, leading to instability or node failure. To address this issue, static charging stations can support periodic refueling during missions, whereas mobile charging platforms and UAV-to-UAV wireless power transfer enable dynamic recharging in the field [23]. A UAV-enabled WPT setup is also analyzed for wireless powered mobile edge computing (MEC) and Wireless Powered Communication Networks (WPCNs). This study examines the deployment of a single UAV to recharge multiple ground stations (GDs) and the coordinated operation of multiple UAVs to service various GDs. The objective was to optimize the efficiency of UAVs’ trajectories [55]. Similarly, a non-convex optimization problem is formulated to handle the constraints of data forwarding, energy renewal, and Quality of Service (QoS). In this methodology, a UAV transfers energy to ground users through Radio Frequency (RF) technology and collects data that are further transmitted to the base station [56]. Ali et al. developed an innovative folding charging point. They applied IPT technology by integrating the receiving coils into the legs of the receiving drones and positioning the transmitting coil at a stationary charging dock [57]. Another study devised a method for in situ power transfer to recharge hotspot UAVs using a flying transmitter UAV (tUAV). Utilizing a Q-learning approach, the flight path of the power source was optimized as a Markov Decision Process (MDP) problem [58]. Eventually, a Multiple-Input–Multiple-Output (MIMO) antenna is suggested for recharging the receiver UAV (rUAV) using RF power transfer. A Proximal Policy Optimization (PPO) was developed to determine the path of the flying source or transmitter UAV (tUAV), enhancing the effectiveness of energy transfer [59]. A Hybrid-action Drone Mobile Charger (HaDMC) was designed to recharge drones at a designated fixed location. Specifically, they employed deep reinforcement learning to develop and train a latent continuous action decoder to enhance drone longevity [60]. Recently, Jian et al. explored the concept of Autonomous Aerial Vehicle Replenishment (AAV-R), which refuels the energy of an Autonomous Aerial Vehicle Task (AAV-T) by connecting with it at the boundary. After transferring energy to an AAV-T, each AAV-R requires a charging station to recharge its battery [61]. These studies state that all drones must return to the ground station for battery renewal. During this period, the area where they were deployed experienced a service interruption or the drones did not deliver quality work [62].
Furthermore, integrating wireless charging strategies with obstacle-aware routing ensures that detours for collision avoidance or link maintenance are energy-efficient, thereby supporting long-term mission reliability. Robust control methods, such as NMPC, provide the foundation for safe evasive maneuvers, advanced routing protocols to maintain connectivity during dynamic operations, and wireless charging strategies to ensure mission sustainability [63].
By combining these approaches, FANETs can achieve resilient, adaptive, and energy-aware performance in complex and unpredictable environments, enabling their deployment in critical applications such as disaster response, urban surveillance, and cooperative monitoring of the environment.
The evolution of WPT charging is presented in Figure 5, and Table 3 provides a demonstration platform for UAV wireless recharging at a glance.
In-Flight Wireless Recharging
Mobile wireless charging has recently gained attention as a method for energy replenishment, especially when a component of the charging system is in motion [70,71]. Moreover, recharging an airborne UAV using a discharging UAV (D-UAV) [22] serves as a classic example of mobile wireless charging. Furthermore, the wireless mobile charger is an auspicious approach for achieving on-demand and fully automated UAV battery recharging. This groundbreaking method of in-flight wireless recharging eliminates the need for UAVs to land and connect to stationary charging stations, thereby enhancing their operational effectiveness and extending their flight durations. The concept of in-flight mobile wireless charging for UAVs presents new opportunities for extended missions in remote or inaccessible regions, where conventional charging facilities may be scarce or unavailable, although the range of each in-flight wireless recharging technique is different. Table 4 represents recent breakthrough methods for in-flight wireless recharging of UAVs or FANETs.
4. Research Challenges of WPT for FANETs
Despite the significant potential of wireless charging solutions to extend the operational range and autonomy of FANETs in IoT-enabled environments, several challenges hinder their widespread adoption [49]. The effectiveness of these systems is constrained by technical factors, such as limited power transfer efficiency, short charging ranges, and precise alignment requirements of several wireless power transfer methods [82,83]. Operational considerations, including the added weight of charging hardware on UAVs, electromagnetic interference, and compliance with safety and regulatory standards, further complicate their deployment [84]. Moreover, establishing a scalable and cost-effective charging infrastructure in dynamic, large-scale smart environments presents logistical and economic barriers. These constraints underscore the need for ongoing research into more efficient, safe, and adaptable charging methods specifically designed for the unique mobility and energy requirements of FANETs.
4.1. Energy Constraints and Efficiency
UAVs operating within FANETs are small and lightweight, which is a design necessity that limits their payload capacity and, consequently, the size and weight of the attached batteries. This inherent constraint results in a minimal battery capacity, which significantly restricts the flight duration, mission range, and ability to support energy-intensive sensors and communication equipment [85,86]. Although wireless charging offers a capable means of extending operational time without requiring frequent battery swaps or physical docking, its practical effectiveness is hindered by the low efficiency and limited energy throughput of current wireless power transfer technologies. These bottlenecks become especially critical when attempting to recharge UAVs in midair or during short landing intervals because the delivered power may be insufficient to sustain prolonged missions or to meet the high instantaneous energy demands of certain onboard systems. Consequently, despite its potential, wireless charging remains a supplementary rather than a primary energy solution for FANET applications in their current state [16].
WPT technologies, particularly those based on RF transmission, face inherent efficiency challenges that limit their practical applications in FANETs [87]. RF-based systems tend to suffer from significant energy loss during transmission, with their efficiency decreasing rapidly as the distance between the transmitter and receiver increases [88,89]. This issue is further compounded by the sensitivity of these systems to alignment; even slight deviations in the orientation or position of the UAV relative to the charging source can result in substantial reductions in power transfer efficiency [90]. In dynamic FANET environments, where UAVs are constantly moving and may experience unpredictable positional shifts owing to wind, turbulence, or navigation requirements, maintaining the precise alignment necessary for optimal energy transfer is challenging. These factors not only reduce the net energy delivered to the UAV but also lead to increased transmission power requirements, higher operational costs, and potential interference with other wireless systems operating in the same frequency bands [91].
4.2. Range Alignment and Power Delivery
Near-field wireless charging methods, such as inductive and magnetic resonance couplings, are widely recognized for their high efficiency over short distances. However, their efficacy depends heavily on maintaining a tight coupling and precise alignment between the transmitter and receiver coils [57]. Even slight deviations in position, tilt, or orientation can lead to substantial drops in charging efficiency, whereas increases in separation distance cause the power transfer capability to degrade sharply. In static or controlled environments, alignment can be managed easily; however, in FANET applications, where UAVs are constantly in motion and subjected to environmental disturbances such as wind or turbulence, maintaining this level of precision becomes a major operational challenge. This sensitivity not only limits the practicality of near-field methods for dynamic charging scenarios but also restricts the spatial flexibility required for seamless integration into IoT-enabled smart environments [92].
UAVs, particularly those in FANETs that perform complex sensing, communication, and navigation tasks, require more power than static or low-consumption IoT sensors [93]. Delivering sufficient power wirelessly to sustain such operations without sacrificing transfer efficiency is a non-trivial problem [94]. Increasing the transmission power to meet UAV demand can lead to higher energy losses, increased heat generation, and potential electromagnetic safety concerns while straining the charging infrastructure. In addition, ensuring consistent high-power delivery during short charging windows, such as brief mid-mission stops or aerial hovering, remains difficult with existing WPT systems [95].
Without significant advancements in high-capacity, high-efficiency wireless charging designs, these power transfer limitations will continue to constrain the feasibility of fully untethered long-duration FANET operations in the future.
4.3. Safety Interference and Regulatory Concerns
RF-based WPT systems operate by emitting electromagnetic fields to transmit energy over long distances. Although this approach enables flexible, contactless charging, it must comply with the strict regulatory exposure limits set by bodies such as the International Commission on Non-Ionizing Radiation Protection (ICNIRP) [96] and the Federal Communications Commission (FCC). These limits are particularly important in urban or densely populated smart areas, where UAVs in FANETs may operate close to humans, animals, and sensitive electronic equipment such as medical devices. High-power RF transmissions, which may be required to meet the energy demands of UAVs, risk exceeding these safety thresholds, potentially posing health concerns owing to prolonged or repeated exposure to EMFs [97]. Additionally, high-intensity RF fields can interfere with medical devices, wireless communication systems, and complex infrastructure, raising safety and legal compliance issues. Therefore, careful system design, power management, and operational zoning are necessary to balance performance and biosafety requirements [91].
In addition to regulatory and biosafety concerns, WPT systems, particularly those using inductive or resonant coupling, are vulnerable to electromagnetic interference (EMI) from surrounding objects and environmental conditions [86]. Metallic structures, dense building materials, and other sources of electromagnetic noise, which are common in smart urban and industrial settings, can distort the magnetic or electric fields used for energy transfer. This can lead to reduced coupling efficiency, unstable power delivery, and charging interruptions. For FANET applications, where UAVs may need to recharge in cluttered environments such as warehouses, factories, or urban canyons, these interference effects can significantly undermine the reliability and predictability of the wireless charging operations. Addressing EMI susceptibility requires careful placement of charging infrastructure, shielding of sensitive components, and adaptive control systems that can compensate for real-time changes in the electromagnetic environment [98].
4.4. Infrastructure Scalability and Cost
Establishing charging stations, whether in the form of ground-based pads, inductive platforms, or directional beam transmitters [99], requires a significant upfront investment in hardware and integration with existing smart city infrastructure. The process often involves modifying physical spaces to accommodate power delivery systems, ensuring network connectivity for monitoring and control, and aligning installations with local energy distribution capabilities. In addition, because FANETs operate on dynamic and often unpredictable flight paths, charging stations must be strategically positioned to be both accessible to UAVs and unobtrusive in the environment. Achieving a balance between accessibility, safety, and minimal disruption to existing infrastructure adds to the overall complexity of deployment [83].
Even when individual wireless charging stations are successfully deployed, scaling the system to meet the operational needs of FANETs remains a major obstacle [100,101]. For UAVs to operate freely and continuously within large-scale IoT-enabled smart environments, wireless charging must be widely available and reliable under varying demand conditions. This entails ensuring adequate coverage across wide geographical areas, accommodating the simultaneous charging of multiple UAVs, and coordinating the charging schedules to prevent congestion or downtime. Large-scale deployments must also contend with challenges such as energy distribution across the network, real-time UAV tracking for dynamic charging allocation, and redundancy planning to maintain service in the event of station failures. These logistical and engineering complexities make scalability one of the most difficult barriers to the widespread adoption of wireless charging for FANET operations [102].
4.5. Security and Privacy Risks
Wireless charging systems, which are primarily designed for energy transfer, can inadvertently become sources of information leakage through side-channel attacks [103]. Variations in the current draw, charging cycles, or power consumption patterns can reveal details about a UAV’s operational status, mission profile, or even the type of onboard equipment being used. In IoT-rich FANET environments, where UAVs frequently interact with other devices and infrastructure, such data can be intercepted by malicious actors to infer flight schedules, detect mission-critical activities, and predict UAV behavior. These vulnerabilities are particularly concerning in scenarios involving sensitive operations, such as surveillance, emergency response, or industrial inspection, where operational secrecy is paramount. Therefore, all IoT-rich FANET systems require the ability to ensure appropriate security and manage privacy risks [104]. Without proper encryption, obfuscation, or anonymization of charging-related data, wireless power transfer systems risk becoming an overlooked but exploitable entry point for cyber–physical attacks [105].
FANETs typically rely on a complex ecosystem of IoT devices, edge computing nodes, and smart infrastructure for navigation, coordination, and data exchange purposes. Integrating wireless charging capabilities into this ecosystem without introducing new security vulnerabilities is a significant design challenge. Charging systems may require networked control, authentication protocols, and remote monitoring, all of which can create additional attack surfaces if they are not properly secured. For example, a compromised charging infrastructure can be exploited to disrupt UAV operations, manipulate energy delivery, and inject malicious firmware updates [106]. Furthermore, ensuring interoperability between heterogeneous charging technologies and communication protocols adds another layer of complexity to FANETs [107]. To address these risks, the integration of wireless charging must be approached with the same level of cybersecurity diligence as communication systems, employing robust authentication, intrusion detection, and secure data-handling measures throughout the charging network.
5. Deployment Issues of Wireless Recharging in FANETs
In addition to the aforementioned studies, two main research challenges must be addressed to overcome the limitations of WPT for FANETs. In this section, we present the optimization of UAVs and IoT integration issues.
5.1. Optimization of UAV Trajectories for Wireless Recharging
The task of optimizing UAV trajectories for wireless recharging involves designing flight paths that maximize energy transfer to ground devices while minimizing UAV energy consumption. This complex challenge requires careful consideration of several factors, including the battery capacity, recharging efficiency, flight dynamics, and spatial arrangement of ground nodes that require power. A key difficulty in this optimization process is finding the right balance between the coverage area, recharging duration, and UAV endurance [108].
To address these multi-objective optimization challenges, advanced algorithms such as genetic algorithms, particle swarm optimization, and reinforcement learning techniques are commonly used. These methods aim to discover optimal or near-optimal solutions that adhere to constraints related to UAV capabilities, regulatory standards, and the specific requirements of wireless charging networks. Moreover, the ability to adapt flight paths in real time based on the changing power demands of ground nodes and environmental conditions is a growing area of research that aims to enhance the overall efficiency and reliability of UAV-based wireless charging systems.
Mathematical Modeling of Objective Functions for UAV Trajectories
The objective functions for UAV trajectories are typically calculated using mathematical formulations for handling the optimization issue. The state-of-the-art existing literature is described below.
In the proposed Trajectory Optimization of Laser-Charged (TOLC) algorithm [109], T is calculated as the total working time of the UAV using Equation (1).In 2023 [110], an algorithm was proposed to employ an Energy Transfer (ET) UAV for recharging all Energy Receivers (ERs). The goal is to maximize the harvested energy via Equation (4).Another Distributed Multiple-Input–Multiple-Output (D-MIMO) [111] setup is anticipated for a three-dimensional trajectory optimization in Equation (6).Similarly, a Trajectory Optimization of Multi-UAVs Algorithm (TOUMA) [112] was projected for minimizing the time taken by a UAV to recharge the entire wireless network in (12).Periodic charging schemes were proposed in [113] to recharge the RWSN with a minimum charging delay T. The least delay in charging can be achieved by calculating Equations (16) and (17) in Table 5.
Table 5 provides a detailed comparison of the mathematical modeling of objective functions for UAVs’ flying paths defined in the above literature.
5.2. IoT Integration into FANETs for Energy Management and Coordination
The integration of IoT into FANETs has become central to addressing one of the most pressing challenges in UAV operations: energy management. IoT platforms provide the infrastructure for seamless data exchange among UAVs, ground stations, and edge/cloud systems, allowing UAVs to share critical information, such as battery status, energy consumption rates, and mission requirements, in real time [114]. By leveraging IoT-enabled communication frameworks, energy usage across the swarm can be monitored continuously, enabling adaptive decision-making that extends the mission duration and enhances the overall system resilience [115,116].
Traditional FANET routing schemes prioritize connectivity and coverage, whereas IoT-based frameworks incorporate energy awareness into the routing and task allocation processes. For instance, UAVs with higher residual energy can be dynamically assigned more complex or energy-intensive tasks. Simultaneously, low-energy UAVs can be rerouted toward charging hubs or tasked with less demanding operations. Machine learning models hosted on IoT edge servers can further optimize these processes by predicting UAV energy consumption patterns and scheduling missions, thereby reducing the risk of in-flight power depletion [117,118].
Smart charging stations connected through IoT infrastructure can dynamically allocate charging slots, manage queuing, and prioritize UAVs based on urgency and mission criticality. When combined with WPT systems, IoT platforms can schedule aerial refueling or short-landing recharges with minimal disruption to swarm operations. This coordination ensures that UAVs can maintain persistent coverage in large-scale IoT-enabled smart environments such as urban monitoring and industrial inspection. Recent studies have highlighted how IoT-assisted charging orchestration can improve both energy efficiency and reliability in large-scale deployments [4,25,119].
In addition to energy management, IoT plays a crucial role in swarm-level coordination and resilience. UAVs can share positional and energy data to synchronize their movements, avoid collisions, and optimize their collective coverage [120]. IoT platforms also provide the backbone for integrating FANETs with other smart systems, such as edge computing nodes and cloud controllers, enabling the holistic management of energy and data flows. This transforms FANETs into highly adaptive, self-organizing systems capable of long-duration missions with minimal human intervention [121,122].
This growing trend of IoT integration in FANETs by employing small UAVs for different tasks is shown in Table 6.
IoT integration elevates FANETs from energy-constrained, isolated networks to intelligent, adaptive, and sustainable aerial ecosystems. Through IoT-enabled monitoring, predictive analytics, and coordinated charging, FANETs can achieve higher energy efficiency, extended mission endurance, and improved swarm coordination [130]. The growing convergence of IoT, machine learning, and wireless charging technologies indicates that the future of FANETs is increasingly autonomous, scalable, and resilient to the challenges posed by dynamic IoT-enabled smart environments.
Eventually, a comparative analysis of traditional charging in FANETs with the wireless charging of IoT-enabled FANETs was conducted. This analysis demonstrates that traditional approaches restrict limited battery-operated missions of FANETs, whereas WPT architectures enable persistent IoT operations through adaptive recharging. Performance is specifically defined in the research questions as key metrics documented in the existing literature, including flight endurance/consistency (min/h), power efficiency (%), human intervention, and Packet Delivery Ratio (PDR, %).
Table 7 presents a detailed comparison between WPT-FANETs and traditional battery-only FANETs.
6. Graphical Indications of the Global Market and Implementation of Wireless Recharging in UAVs
Recent market graphs represent the actual situation and growth of IoT-integrated FANETs along with wireless recharging systems. The increasing trend of drone use in smart environments creates more business opportunities for drone/UAV manufacturers. For example, data on the global demand for firefighting drones were retrieved from Grand View Horizon [132], which will raise the interest of researchers and industries in this field. The data are publicly available; therefore, we present them in a pictorial form to facilitate understanding of their future implications.
Figure 6 shows the global firefighting drone market.
Similarly, the global UAV market and its growth factors can be accessed through the Precedence Research website [133]. The UAV drone market worldwide was valued at USD 37.68 billion in 2024 and is projected to surpass USD 186.79 billion by 2034, indicating a vast research domain for the future. The overall UAV market size, along with its key growth factors, is also illustrated in Figure 7.
Moreover, the higher implementation of smart homes and cities has become a necessity for surveillance and security services in today’s society. This data will help to understand the gaps in the modeling of UAVs, which are openly available on the Scoop Market [134]. The Global Smart Home Security Market is projected to experience substantial growth, increasing from USD 28.4 billion in 2023 to approximately USD 107.1 billion by 2033.
Figure 8 illustrates the projected IoT market demand.
The global market size of WPT is also experiencing remarkable growth and is expected to reach USD 15.09 billion by 2031. This data from Market Report Analytics represents the diverse applications of WPT in the electronics industry in the future [135]. Figure 9 clearly shows the prediction about WPT.
Despite the drone market and IoT demand forecasting, there is still a research gap in the advancement of wireless recharging of UAVs. Current commercial strategies for wireless recharging offer partial support for recharging interfaces and energy management in FANETs. In summary, it is essential to align technical research with the above-presented market forecasting, which will fill the significant research gaps in hardware design, regulatory issues, modeling, and real-world implementations.
7. Potential Open Issues and Research Gaps for WPT in FANETs
Expanding on the research challenges and deployment issues outlined in the aforementioned Section 4 and Section 5, this section summarizes them as follows.
7.1. Key Scientific Issues
Most existing studies consider simple mobility, operational, and propagation models without considering the highly dynamic nature of UAVs in the 3D airspace of a realistic IoT environment [16,49]. There is an evident demand for intelligent simulation frameworks, data-driven modeling, and energy-aware networks. In addition, the performance of UAVs can be enhanced by integrating online learning algorithms, optimizing UAV trajectories in 3D areas, scheduling recharging, and using tracking techniques for task allocation.
7.2. Technological Challenges
From the perspective of technical challenges, the size of UAVs, limited capacity of their payload, and budget for quick recharging in UAVs still need to be improved in the present UAV platforms [85,86]. Open issues for future research should focus on the lightweight manufacturing of UAVs, power allocation strategies for UAV-to-UAV power transfer, coverage-efficient antennas, durable charging protocols capable of maintaining the cooperative performance of numerous flying UAVs, harsh weather conditions, and channel disruptions.
7.3. Regulatory Issues
Contactless recharging methods are promising but depend on some vital factors such as aviation regulations, alignment of power transfer to the receiver, human exposure safety, and spectrum rules [84,96,97]. All previous studies on WPT have been explored independently without tailoring the dense IoT environment. Future research clearly demands regulatory agendas that need to be addressed explicitly, such as the use of shared space by UAVs and ensuring the safety measures of high-power voltage transfer in urban and populated infrastructure. Furthermore, cyberattacks, security, and privacy [104,105] concerns can be addressed using jamming, mobile edge computing, and blockchain-enabled UAVs, as well as cooperative communication among UAVs for power splitting.
7.4. Practical Barriers
Finally, in terms of practical barriers, the state-of-the-art literature for wireless recharging in UAVs is employed in ideal, small-scale scenarios with diverse application assumptions. Large-scale deployment, energy reservoirs, optimal implications of charging stations, maintenance costs of charging grids, and functionality of logistic fleets of UAVs in far-flung or remote areas are also crucial practical barriers [100,101]. These barriers continue to create a research gap between real-world situations and simulation-based environments. To bridge this gap, future studies should involve large-scale experimental trials, efficient placement of charging stations, and collaboration with the industry for efficient recharging coil designs.
8. Conclusions and Future Endeavors
Although wireless charging holds considerable potential for enhancing the endurance and autonomy of FANETs in IoT-enabled smart environments, its implementation faces a combination of technical, operational, regulatory, and security barriers. Current WPT technologies struggle with limited range, low efficiency, and alignment sensitivity. Meanwhile, high energy demands and mobility constraints make it difficult to optimize a reliable mid-mission charging trajectory. Safety regulations, electromagnetic interference, and infrastructure complexity further hinder large-scale deployment. Additionally, the integration of charging systems with communication networks introduces potential cybersecurity vulnerabilities. Overcoming these challenges will require advances in high-efficiency, scalable, and secure wireless power delivery solutions, along with careful consideration of environmental, operational, and regulatory factors to ensure their safe and practical adoption. In conclusion, wireless charging solutions for FANETs represent a crucial stepping stone towards achieving truly autonomous and self-sustaining aerial networks in IoT-enabled smart environments. As this technology matures, it will undoubtedly play a pivotal role in shaping the future of smart cities and interconnected systems, bringing us closer to a more efficient, sustainable, and technologically advanced society.
Additionally, current research on wireless power transfer methods should support the expansion of the geographical area of wireless charging structures and be more adaptable for energy transfer to UAVs and IoT devices.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1Abbas S. Abu Talib M. Ahmed I. Belal O. Integration of UA Vs and FANE Ts in Disaster Management: A Review on Applications, Challenges and Future Directions Trans. Emerg. Telecommun. Technol.202435 e 7002310.1002/ett.70023 · doi ↗
- 2Khan M.A. Safi A. Qureshi I.M. Khan I.U. Flying Ad-Hoc Networks (FANE Ts): A Review of Communication Architectures, and Routing Protocols Proceedings of the 2017 First International Conference on Latest Trends in Electrical Engineering and Computing Technologies (INTELLECT)Karachi, Pakistan 15–16 November 20171910.1109/INTELLECT.2017.8277614 · doi ↗
- 3Bekmezciİ. Şahingöz O.K. TemelŞ. Flying Ad-Hoc Networks (FANE Ts): A Survey Ad Hoc Netw.2013111254127010.1016/j.adhoc.2012.12.004 · doi ↗
- 4Kuru K. Planning the Future of Smart Cities with Swarms of Fully Autonomous Unmanned Aerial Vehicles Using a Novel Framework IEEE Access 202196571659510.1109/ACCESS.2020.3049094 · doi ↗
- 5Kanellopoulos D. Sharma V.K. Panagiotakopoulos T. Kameas A. Networking Architectures and Protocols for Io T Applications in Smart Cities: Recent Developments and Perspectives Electronics 202312249010.3390/electronics 12112490 · doi ↗
- 6Pal M. Mukherjee A. Panja A.K. Mondal S. A flying ad-hoc networks framework for smart farming and precision agriculture Proceedings of the 3rd International Conference on Sustainable Computing and Data Communication Systems (ICSCDS)Erode, India 17–18 January 20251719172510.1109/ICSCDS 65426.2025.11166836 · doi ↗
- 7Rahman K. Ibrahim M. Ahmad M. Alhussein M. Ghoneim A. Cognitive lightweight logistic regression-based IDS for Io T-enabled FANET to detect cyberattacks Mob. Inf. Syst.20232023769032210.1155/2023/7690322 · doi ↗
- 8Mukhopadhyay A. Ganguly D. Fanet-based emergency healthcare data dissemination Proceedings of the Second International Conference on Inventive Research in Computing Applications (ICIRCA)Coimbatore, India 11–12 November 202017017510.1109/ICIRCA 48905.2020.9183223 · doi ↗