A Comprehensive Review of Metaheuristic Algorithms for Node Placement in UAV Communication Networks
S. A. Temesheva, D. A. Turlykozhayeva, S. N. Akhtanov, N. M. Ussipov, A. A. Zhunuskanov, Wenbin Sun, Qian Xu, Mingliang Tao

TL;DR
This paper reviews metaheuristic algorithms for optimally placing UAV nodes in communication networks to improve performance and coverage.
Contribution
The paper provides a comprehensive and critical review of metaheuristic algorithms specifically for UAV communication network node placement.
Findings
Metaheuristic algorithms are effective for solving the NP-hard node placement problem in UAV communication networks.
Hybrid algorithms show strong performance in optimizing coverage and computational time in UAVCN scenarios.
Current reviews often focus on terrestrial networks, leaving UAV-specific solutions underexplored.
Abstract
Unmanned Aerial Vehicle Communication Networks (UAVCNs) have emerged as a transformative solution to enable resilient, scalable, and infrastructure-independent wireless communication in urban and remote environments. A key challenge in UAVCNs is the optimal placement of Unmanned Aerial Vehicle (UAV) nodes to maximize coverage, connectivity, and overall network performance while minimizing latency, energy consumption, and packet loss. As this node placement problem is NP-hard, numerous meta-heuristic algorithms (MHAs) have been proposed to find near-optimal solutions efficiently. Although research in this area has produced a wide range of meta-heuristic algorithmic solutions, most existing review articles focus on MANETs with terrestrial nodes, while comprehensive reviews dedicated to node placement in UAV communication networks are relatively scarce. This article presents a critical and…
Click any figure to enlarge with its caption.
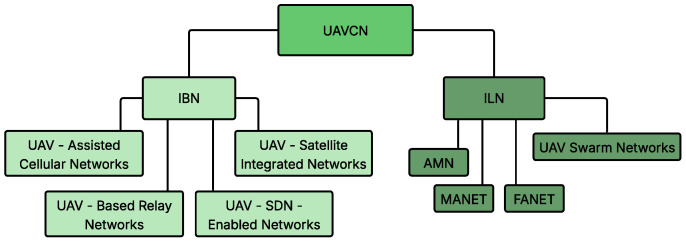 Figure 1
Figure 1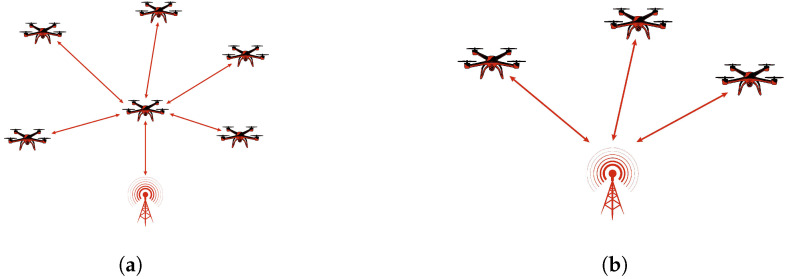 Figure 2
Figure 2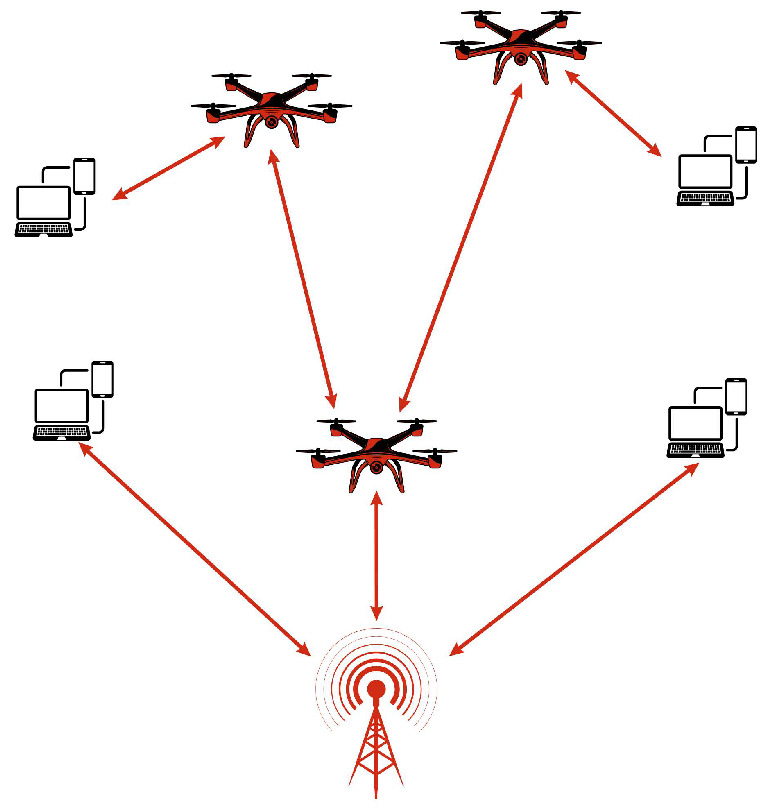 Figure 3
Figure 3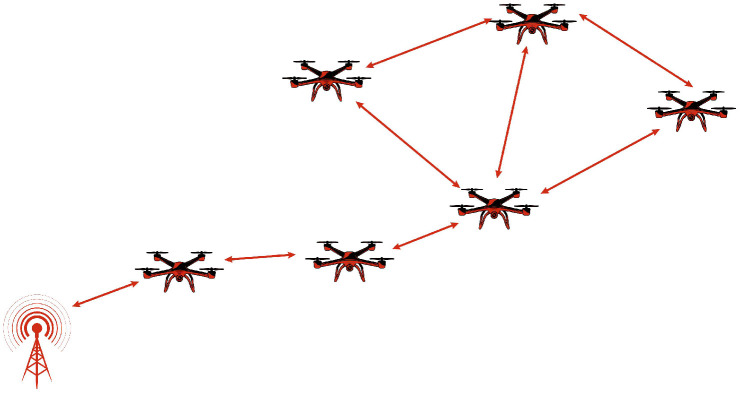 Figure 4
Figure 4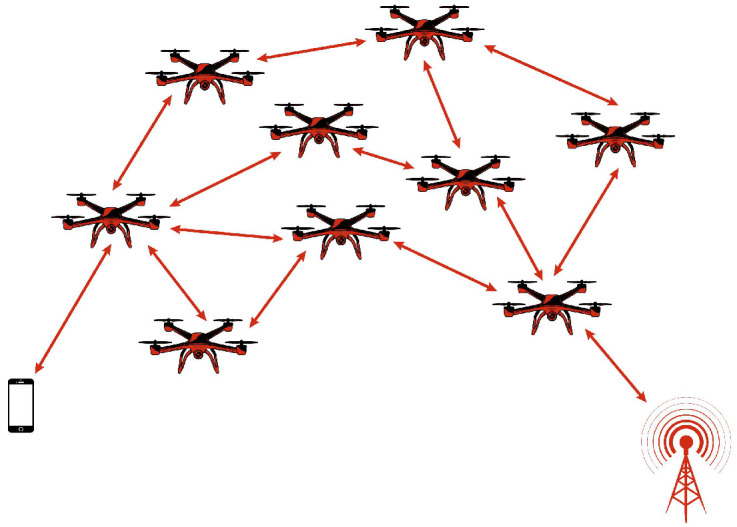 Figure 5
Figure 5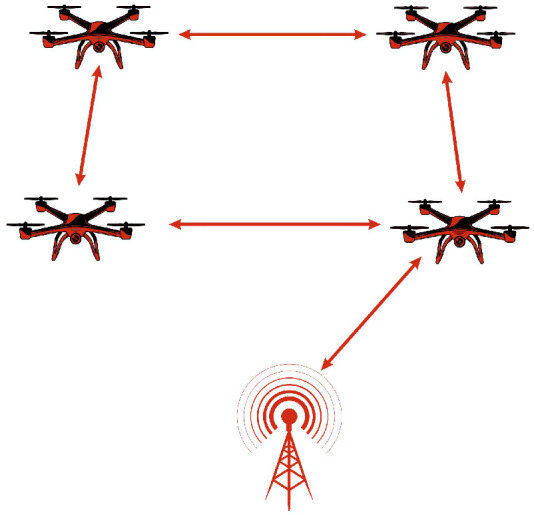 Figure 6
Figure 6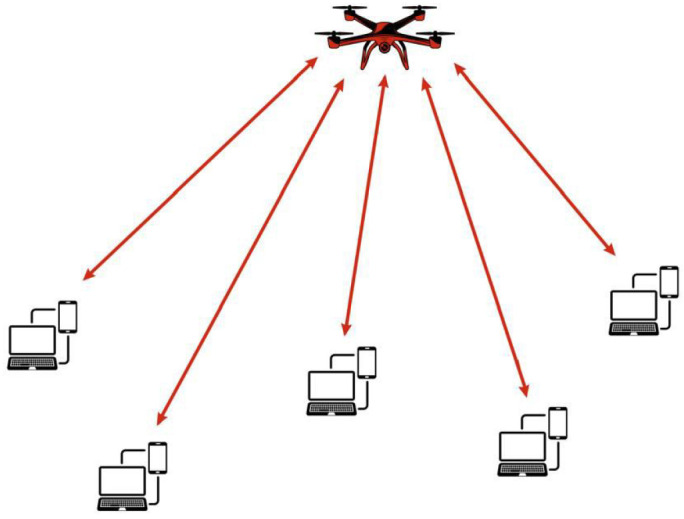 Figure 7
Figure 7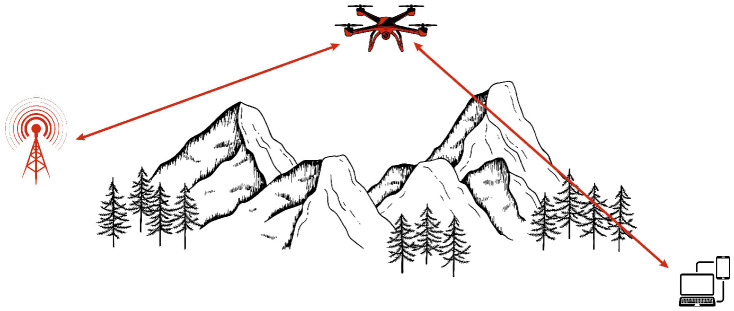 Figure 8
Figure 8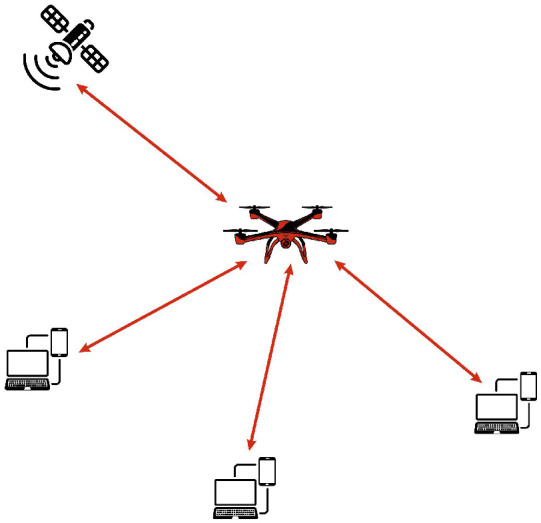 Figure 9
Figure 9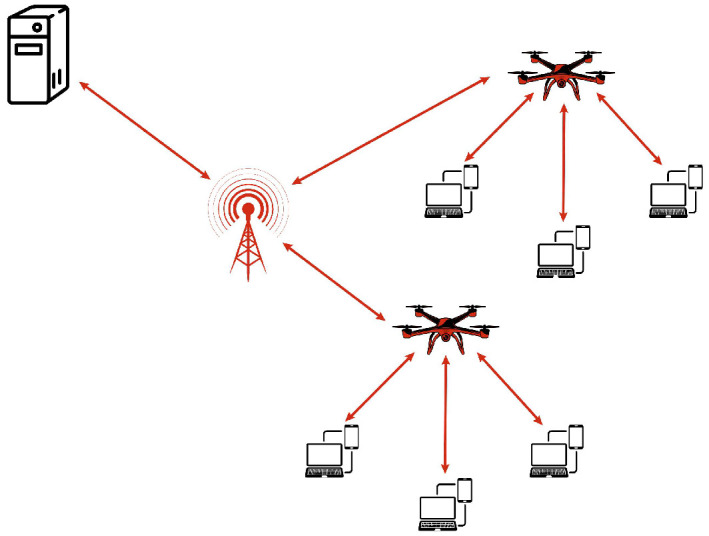 Figure 10
Figure 10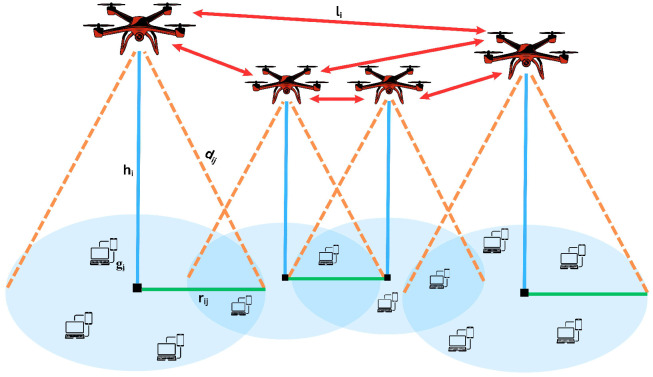 Figure 11
Figure 11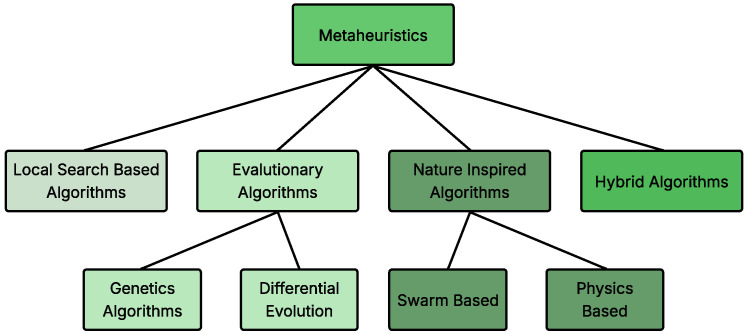 Figure 12
Figure 12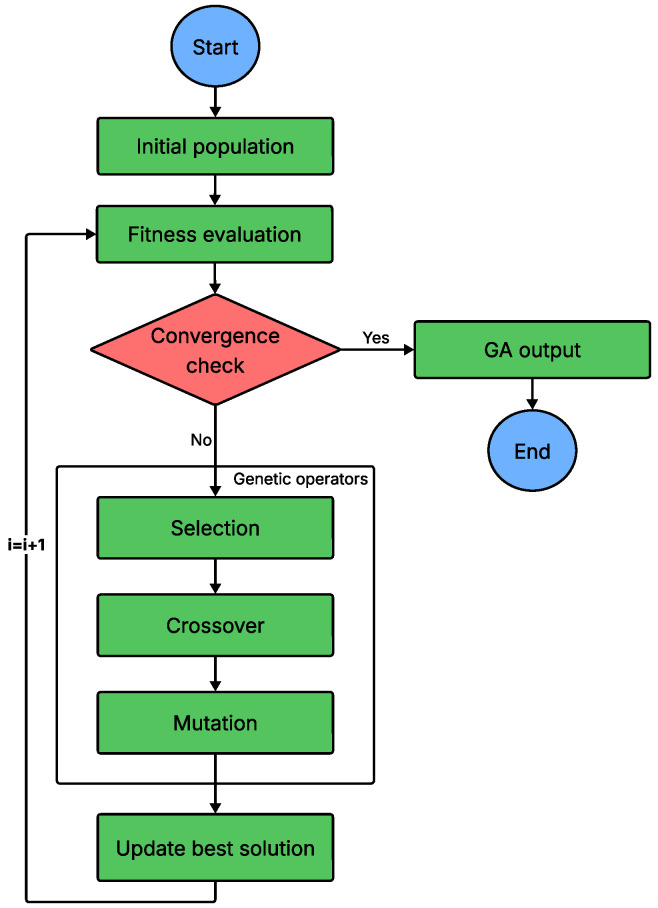 Figure 13
Figure 13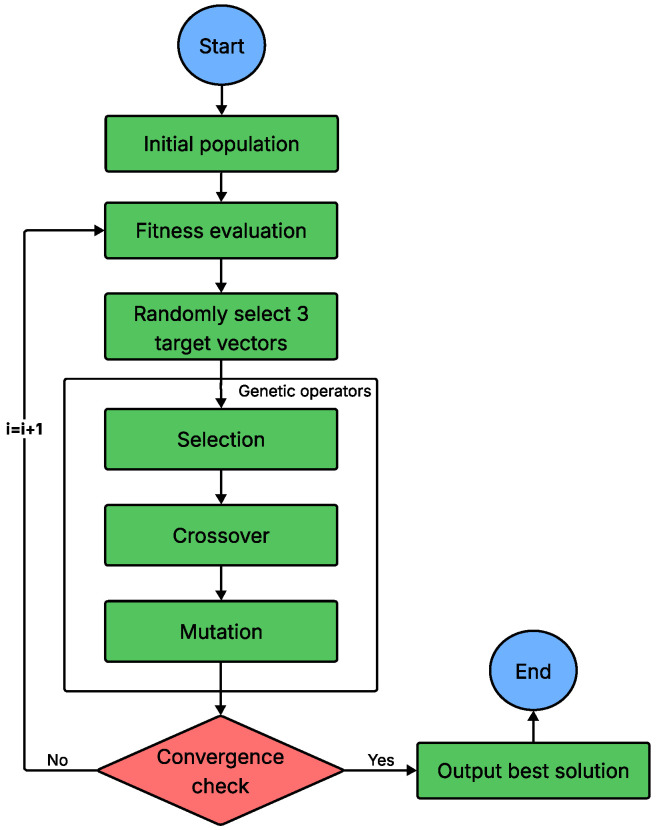 Figure 14
Figure 14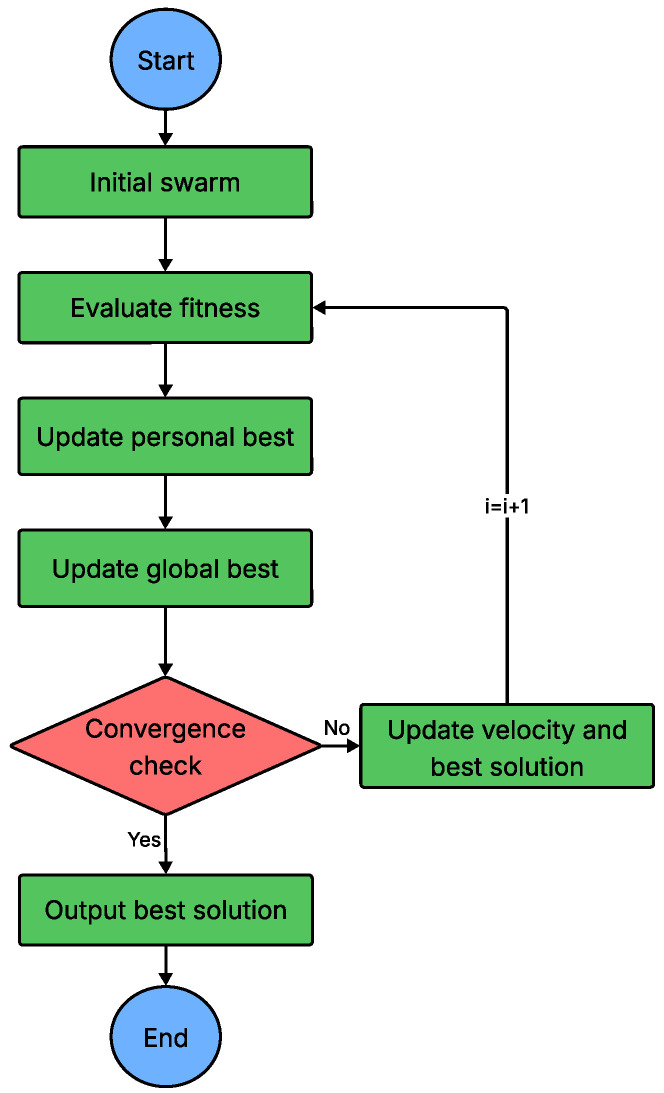 Figure 15
Figure 15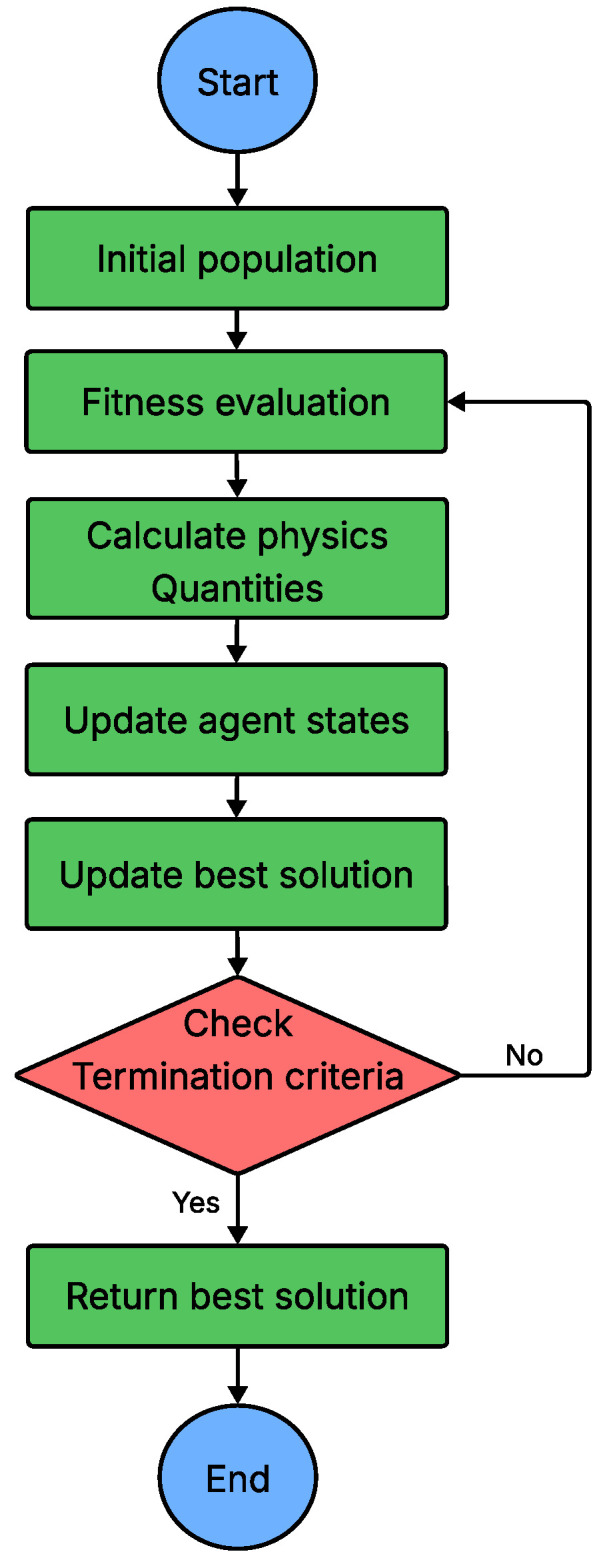 Figure 16
Figure 16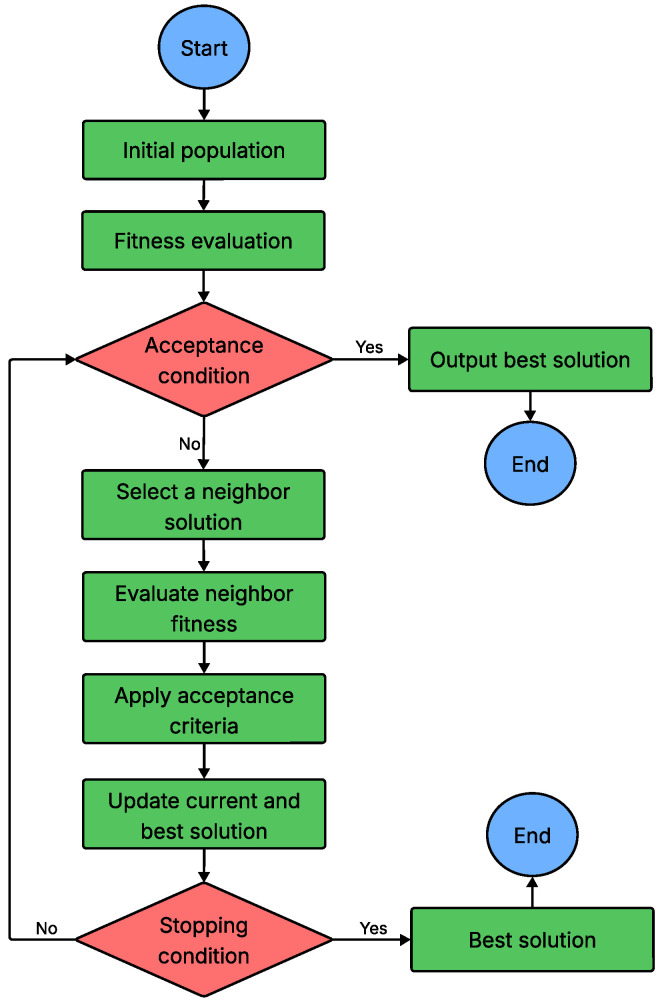 Figure 17
Figure 17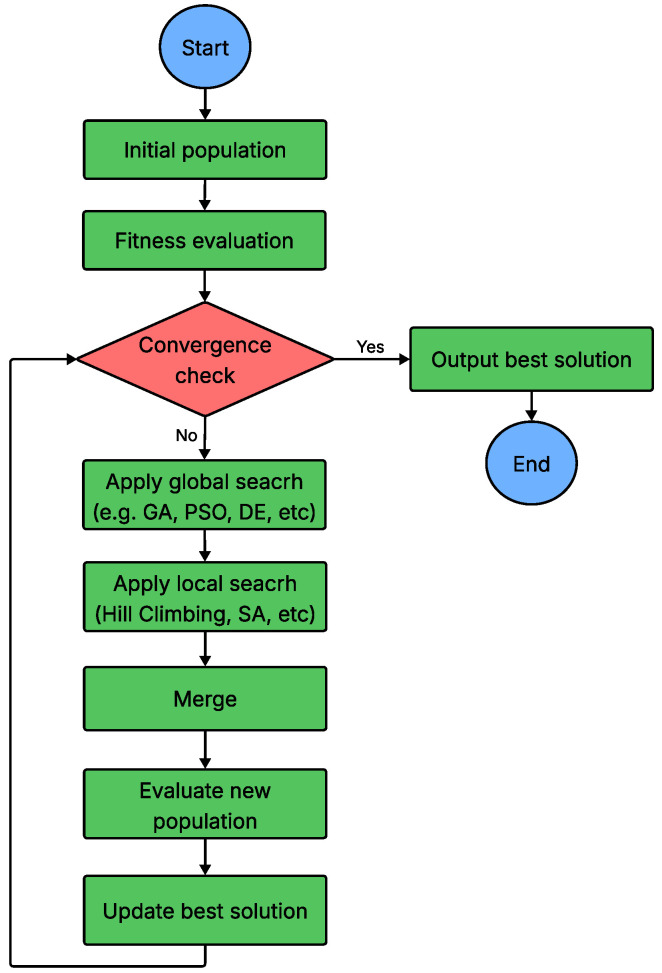 Figure 18
Figure 18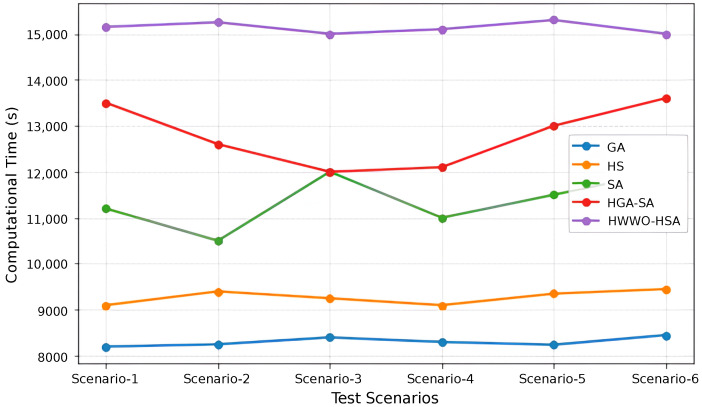 Figure 19
Figure 19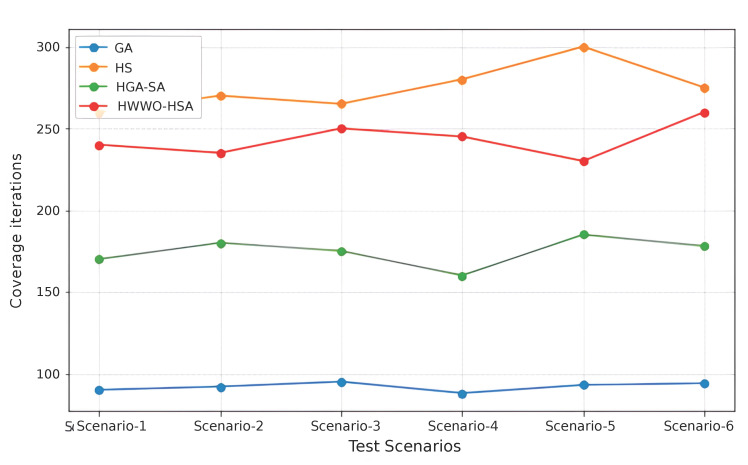 Figure 20
Figure 20- —National Natural Science Foundation of China
Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsUAV Applications and Optimization · Opportunistic and Delay-Tolerant Networks · IoT and Edge/Fog Computing
1. Introduction
In recent years, the rapid advancement of UAVs has driven innovations in communication networks, leading to adaptive architectures tailored to UAV operations [1,2]. Among these, UAV Communication Networks (UAVCNs) have emerged as a transformative solution, enabling reliable, flexible, and infrastructure-independent communication between aerial nodes. A key development in this field is Flying Ad Hoc Networks (FANETs), a specialized extension of Mobile Ad Hoc Networks (MANETs), where UAVs establish wireless links without relying on fixed infrastructure, enabling dynamic communication in remote or disaster-affected areas [3,4].
Expanding this concept, UAV-Assisted Cellular Networks and UAV-based relay networks use UAVs as intermediate nodes to forward data, ensuring resilient and adaptable connectivity [5]. UAVs can act as flying base stations, dynamically adjusting positions based on user density or network demands to optimize coverage, capacity, and reliability, especially in areas with limited infrastructure or during emergencies [6,7]. Similarly, UAV–satellite integrated networks enhance connectivity in both urban and remote environments.
Integration of UAV-based Mobile Edge Computing (MEC) further reduces latency and improves responsiveness [8], while UAV swarms support large-scale cooperative missions and persistent surveillance [9]. Additionally, combining UAVs with massive MIMO technology enhances spectral efficiency, wireless coverage, and connectivity, playing a key role in next-generation 5G and emerging 6G networks [10,11].
Although UAVCNs have been widely adopted, the UAV node placement problem, known to be NP-hard, remains unsolved optimally. Determining the optimal positions of UAVs to maximize coverage and reliability while minimizing latency and packet loss is a combinatorial problem, for which exhaustive search is computationally infeasible due to the exponential growth of possible configurations. Further complicating this challenge is the diversity of objectives and performance metrics used across studies, including coverage, throughput, energy efficiency, network lifetime, and latency, making direct comparison of meta-heuristic algorithms difficult. In addition, real-world scenarios involve dynamic UAV mobility, energy constraints, obstacles, and environmental factors such as weather, while most meta-heuristic approaches are tested on simplified models or simulations, limiting their practical applicability [12,13].
To address these challenges, numerous meta-heuristic algorithms (MHAs) have been proposed for UAVCN node placement, offering advantages such as computational efficiency and ease of implementation, which make them suitable for practical scenarios [14]. However, most existing review studies focus on MANETs or terrestrial networks, and very few address UAVCN node placement; these are not comprehensive or detailed.
In the scientific literature, a range of studies [15,16,17,18,19,20,21,22] address the UAV node placement problem using meta-heuristic algorithms and report comparative evaluations based on performance metrics such as coverage, connectivity, energy consumption, throughput, delay and packet delivery ratio. These works primarily focus on proposing novel or improved meta-heuristic algorithms and validating their effectiveness through comparisons with existing methods in specific scenarios, including smart cities, FANET formation, post-disaster communications, and UAV-based base station deployment. Although they provide experimental results and valuable performance insights, these studies are not presented as review or survey articles and do not aim to provide a systematic, structured and comprehensive analysis of meta-heuristic approaches for UAVCN node placement.
This article presents a comprehensive review of meta-heuristic algorithms applied to the UAVCN node placement problem. It establishes the theoretical foundations of the features of the UAVCN network, details the problem of node placement and its objectives, presents major algorithms’ families, categorizes approaches by principles, and systematically analyzes the strengths, limitations, and potential future directions of each class. By summarizing the key features of the algorithms presented in the discussed articles, along with evaluated metrics and platforms, and by integrating a critical discussion, this article provides both a systematic overview and actionable insights, enabling researchers to understand algorithmic trade-offs and select appropriate strategies for different UAVCN deployment scenarios. To further illustrate practical performance, selected hybrid algorithms are evaluated in a reproducible Python 3.13.2 framework using computational time and coverage metrics, demonstrating their potential to optimize multiple objectives in controlled experimental scenarios.
This article is structured as follows: Section 2 discusses the definition, architecture, and applications of different key subcategories of UAVCNs. Section 3 defines the formulation of the node placement problem and the placement objectives. Section 4 discusses various MHAs, along with illustrative flowcharts that depict their operational workflows. Section 5 presents a discussion of meta-heuristic algorithms for UAV placement, touching upon open problems and future challenges.
2. UAVCN
UAVCNs integrate UAVs with wireless networking technologies, providing efficient and scalable communication solutions for various applications. Wireless networks are categorized into two main domains: infrastructure-based networks (IBN) and infrastructure-less networks (ILN) [23,24], as illustrated in Figure 1.
The ILN encompasses MANET, FANET, Aerial Mesh Networks (AMNs), and UAV Swarm Networks. The IBN consists of UAV-Assisted Cellular Networks, UAV-Based Relay Networks, UAV-Satellite Integrated Networks, and UAV-SDN-Enabled Networks. Figure 2 presents the network architectures of ILN and IBN.
2.1. ILN
Infrastructure-less networks provide a flexible and efficient communication framework, particularly in scenarios where infrastructure-based networks are impractical or infeasible. Figure 2a illustrates a typical ILN architecture in which the nodes are fully self-organized and configured, communicating without base stations or access points. Unlike traditional networks, infrastructure-less networks adapt to dynamic topologies, where nodes establish direct wireless links and frequently change positions. This adaptability makes them ideal for applications requiring rapid and temporary network deployment, such as disaster recovery, military operations, and border security. A key advantage of these networks is their ability to support heterogeneous nodes within a defined coverage area, ensuring seamless communication through single-hop and multi-hop transmission. One of the most common examples of infrastructure-less networks includes MANETs, FANETs and AMNs, where nodes dynamically establish connections and communicate using specialized routing protocols without relying on fixed infrastructure. These networks enhance reliability, scalability, and communication efficiency, making them essential for various real-time and mission-critical applications [25].
2.1.1. MANET
A MANET is a dynamic and self-configuring wireless network composed of independent mobile nodes that act as both hosts and routers. MANETs are widely used in military deployments, disaster management, and vehicular communication, where rapid and flexible deployment is essential. Originally, MANETs use wireless links such as IEEE 802.11 [26] and 802.16 [27], allowing nodes like smartphones, notebooks and tablets to establish adaptive networks. The increasing adoption of MANETs has led to their integration with UAV-based networks, where drones serve as mobile nodes to enhance connectivity in challenging environments. In MANETs, drones dynamically adjust their positions to maintain stable communication links, enabling real-time data exchange between relief teams, command centers, and IoT devices. These networks play a crucial role in emergency scenarios by providing vital communication infrastructure in the absence of traditional networks [26,27]. Figure 3 illustrates the architecture of MANET.
2.1.2. FANET
FANETs are a distinct category of MANETs specifically designed to enable efficient communication among UAVs. Unlike traditional MANETs, which primarily consist of ground-based mobile devices like smartphones and laptops, FANETs operate in highly dynamic airborne environments, where rapid node mobility, frequent topology changes, and extended communication ranges introduce unique networking challenges. Additionally, FANETs consider variations in altitude, extended communication distances, and intermittent link reliability, aspects that are less prominent in conventional MANETs. A key feature of FANETs is their dual role in both UAV-to-UAV communication and data acquisition, where UAVs collect and transmit environmental information to ground control stations. To ensure reliable connectivity, FANETs utilize high-gain directional antennas, multi-hop relays, and long-range transmission technologies, enabling efficient and scalable aerial networking [28,29]. Figure 4 illustrates the architecture of FANET.
2.1.3. AMN
AMNs are a specialized form of FANETs consisting of interconnected aerial nodes, including UAVs, balloons, aerostats, and piloted aircraft. Among these, UAVs are the predominant choice due to their cost effectiveness, ease of deployment, and high mobility. AMNs leverage an ad hoc-based mesh topology, enabling seamless and autonomous communication. This decentralized structure ensures network robustness, fault tolerance, and adaptability, making AMNs well-suited for dynamic and unpredictable environments. A key advantage of AMNs is their ability to enhance connectivity in remote, disaster-stricken, or infrastructure-deficient areas. By forming self-sustaining relay networks, AMNs support mission-critical applications such as emergency response, environmental monitoring, and military surveillance. Specifically, AMNs wirelessly interconnect UAVs in a cooperative manner, maintaining communication links even in challenging conditions. This capability enables wide-area aerial coverage, making it suitable for large-scale deployment scenarios [30,31]. Figure 5 illustrates the architecture of AMN.
2.1.4. UAV Swarm Networks
A UAV swarm is a coordinated group of UAVs that operate collectively to complete tasks with greater efficiency, minimal human intervention, and enhanced adaptability. Unlike FANETs, which focus on maintaining communication between UAVs for networked data transmission, UAV swarms emphasize cooperative behavior, distributed decision-making, and synchronized task execution. Inspired by natural swarm intelligence seen in flocks of birds or colonies of bees, these networks rely on decentralized control mechanisms, where individual UAVs react to local environmental inputs while maintaining overall swarm cohesion. While traditional swarm models depend on a central ground control station (GCS) for coordination, advanced swarm architectures leverage inter-UAV communication, allowing for self-organizing, resilient, and scalable operations. Depending on the level of autonomy, control can range from human-supervised coordination to fully autonomous operation, where onboard algorithms handle navigation, obstacle avoidance, and task distribution [32,33]. Figure 6 illustrates the architecture of UAV swarm network.
2.2. IBN
Infrastructure-based networks provide reliable connectivity, efficient resource management, and enhanced scalability, making them essential for a wide range of applications. These networks form the backbone of modern communication systems, including cellular networks, Wi-Fi infrastructure, and enterprise networking. They play a crucial role in smart cities, healthcare systems, and industrial automation by enabling efficient data transmission and seamless connectivity. Unlike infrastructure-less networks, which rely on direct device-to-device connections, infrastructure-based networks depend on access points (APs) to relay and manage network traffic, ensuring stable and high-speed communication across multiple users and regions [34,35]. In this article, we divided IBN into four subgroups: UAV-assisted cellular networks, UAV-based relay networks, UAV–Satellite Integrated Networks, UAV-SDN-Enabled Networks.
2.2.1. UAV-Assisted Cellular Networks
UAV-assisted cellular networks enhance coverage, capacity, and reliability by deploying UAVs as flying base stations or MEC nodes. Unlike traditional infrastructure reliant on ground-based towers, these networks provide adaptive connectivity in areas with limited or disrupted infrastructure. Their mobility and line-of-sight (LoS) communication improve spectral efficiency, reduce latency and support applications such as IoT, autonomous vehicles, and real-time surveillance. A key advantage is their ability to extend coverage in remote and disaster-stricken areas, ensuring seamless connectivity where terrestrial base stations are unavailable. UAVs dynamically adjust their positions based on traffic demand, optimizing performance and reducing congestion in urban environments. Integrating MIMO technology further enhances efficiency through spatial multiplexing, beamforming, and interference reduction. Additionally, UAV-assisted cellular networks support ultra-reliable low-latency communication (URLLC) and enhanced mobile broadband (eMBB), making them essential for 5G and beyond. For instance, during natural disasters, these networks restore emergency communications, aiding first responders with real-time data for faster disaster response [36,37]. Figure 7 illustrates the architecture of a UAV-assisted cellular network.
2.2.2. UAV-Based Relay Networks
Relay networks based on UAVs extend wireless coverage and improve connectivity in areas where direct communication links are unreliable or obstructed. Unlike static relays, UAVs dynamically adjust their positions to optimize coverage, enhance signal strength, and reduce interference, enabling long-range, high-speed data transmission. A key advantage is their ability to leverage LoS communication, minimizing the degradation of the signal from obstacles and terrain. This makes them valuable for disaster recovery, remote sensing, rescue operations, and rural connectivity. By forming multi-hop relay links, UAVs bridge communication gaps over long distances, ensuring uninterrupted connectivity. To enhance performance, UAV relay networks incorporate advanced techniques such as MIMO for improved data rates, millimeter wave (mmWave) communication for high capacity links, and simultaneous wireless information and power transfer (SWIPT) for energy efficiency. Increasingly integrated in next-generation networks, UAV relays work alongside high-altitude platform stations (HAPS) and low Earth orbit (LEO) satellites, leveraging AI-driven control for real-time network optimization [38,39]. Figure 8 illustrates the architecture of a UAV-based relay network.
2.2.3. UAV–Satellite Integrated Networks
Communication between satellites and UAVs is essential for the realization of integrated space-air-ground networks. This link largely depends on a stable LoS connection and is particularly vulnerable to rain attenuation, especially when operating in higher frequency bands such as the Ka-band. Depending on their onboard equipment and mission requirements, UAVs can interact with satellites in different orbital regimes during flight. Geosynchronous satellites (GEO) are typically employed for satellite-to-UAV communication due to their fixed position relative to the Earth’s surface, which simplifies link maintenance. For the UAV-to-satellite uplink, successful communication relies on accurate alignment of the UAV’s transmission beam with the satellite. However, the continuous motion and changing orientation of UAVs can affect beam alignment, potentially degrading link quality. In typical UAV-assisted satellite communication scenarios, the UAV adjusts its beam direction dynamically to maintain a stable connection with the satellite as it navigates [40,41]. Figure 9 illustrates the architecture of a UAV–satellite integrated network.
2.2.4. UAV-SDN-Enabled Networks
UAV-SDN-Enabled Networks offer enhanced flexibility, agility, and resilience by integrating Software-Defined Networking (SDN) into aerial communication infrastructures. SDN introduces network programmability by decoupling the control and data planes through a logically centralized controller. This separation of concerns enables dynamic network reconfiguration, efficient resource allocation, and improved management of network infrastructure. As illustrated in Figure 10, UAVs operate as drone cells, providing wireless connectivity to ground users in a decentralized manner, especially in environments where terrestrial infrastructure is absent or insufficient. In this architecture, a central base station connected to a centralized controller or core network server manages the overall network functionality, enabling real-time decision-making and coordination. UAVs act as data plane nodes, responsible for collecting user data and environmental context, while the base station and server function as control plane entities, managing routing, bandwidth allocation, and connectivity decisions. This division supports the seamless integration and removal of UAVs within the network and enables adaptive service delivery in response to changing conditions. By leveraging SDN, such an architecture significantly enhances the adaptability, manageability, and performance of UAV communication networks, making them highly effective for dynamic, remote, or mission-critical scenarios [42,43].
3. UAV Node Placement Problem in UAVCN
3.1. System Model
In UAVCNs, UAVs operate at altitudes ranging from 100 m to 3 km and are equipped with wireless technologies such as LTE, WiFi, or LPWAN. Depending on the network type and deployment scenario, UAVs can serve as flying access points or localization anchors for randomly distributed ground users [44].
Usually, the system is represented by an undirected graph , where V is the set of all nodes and E is the set of communication links. The node set V consists of UAV nodes and ground users . UAVs are deployed in 3D space and denoted as , where each UAV has coordinates , with representing the UAV’s altitude. are distributed on the 2D ground plane and denoted as , with each user located at . The edge set E represents communication links, which include Air-to-Air (A2A) links between UAVs and Air-to-Ground (A2G) links between UAVs and ground users, established based on signal strength and coverage criteria. UAVs are often arranged in equilateral triangles in the air with adjustable side lengths and altitudes to ensure overlapping coverage areas, as illustrated in Figure 11 [45].
To model communication between UAVs and , the Friis free-space path loss model is commonly used [46]. The received signal power (in dBm) between a UAV and a ground user can be calculated as follows [46]:
where is the transmit power (dBm), and are the antenna gains (dBi), is the carrier frequency (Hz), and c is the speed of light . The absolute LOS distance is calculated as follows [46]:
where is the Euclidean distance on the ground between and the projection of UAV .
While the Friis model provides a simple and widely used approximation, it does not capture probabilistic line-of-sight (LoS) or non-line-of-sight (NLoS) propagation effects that may occur in urban, suburban, or obstructed environments. To account for more realistic A2G conditions, the channel can be modeled using a probabilistic combination of LoS and NLoS links. The average path loss between UAV and ground user can be expressed as follows [47]:
where is defined in (2).
The probability of a LoS connection depends on the elevation angle between UAV and ground user and is given by:
where a and b are environment-dependent parameters. The elevation angle is defined as follows:
with denoting the altitude of UAV .
The path loss under LoS and NLoS conditions is modeled as follows [47]:
where represents the excessive path loss due to shadowing, diffraction, and blockage effects caused by the environment.
This system-level abstraction captures the impact of UAV altitude, link distance, and environmental conditions on signal attenuation and is sufficient for analyzing coverage, connectivity, and UAV node placement in UAV communication networks.
3.2. Placement Objectives
The node placement problem in UAVCNs is a critical multi-objective optimization task driven by the need to enhance overall network performance while considering dynamic topologies, energy constraints, QoS requirements, and UAV altitude. Optimal placement strategies balance the horizontal positioning and altitude of UAVs to maximize key performance metrics such as user coverage, node connectivity, and throughput while minimizing end-to-end delay, energy consumption, and the packet delivery ratio (PDR) to support sustained and scalable operations. To quantitatively evaluate these objectives, standard performance metrics are typically expressed using well-established mathematical formulations, as presented below [45,46,47,48,49,50,51].
3.2.1. Coverage
It refers to the spatial extent within which UAVs can reliably transmit communication signals to ground users and can be defined as follows [45]:
where the coverage variable is represented as follows:
here, denotes the received signal power as defined in (1), and is the minimum received power threshold required for reliable communication.
3.2.2. Connectivity
It refers to the ability of nodes within UAVCN to establish and maintain reliable communication links with one another, ensuring continuous data exchange across the network. It is calculated as follows [45]:
where , , is the number of nodes in the ith connected subgraph, and .
3.2.3. Throughput
It refers to the volume of data successfully transmitted across a communication channel within a specified time interval. The throughput T in bits per second is calculated as follows [49]:
where is the number of packets successfully received by node j from node i, is in bits, and is the simulation time in seconds.
3.2.4. End-to-End Delay
It refers to the time required for a data packet to travel from the source node to the destination node. End-to-end delay can be defined as follows [48]:
where is the ith packet, is the time at which the packet was transmitted, is the time at which the packet was received, n is the number of successfully delivered packets.
3.2.5. Energy Consumption
It refers to the amount of energy used by UAVs during operation, including both communication and flight energy costs. Efficient energy modeling is essential for optimizing deployment and extending UAV network lifetime. A realistic model of the energy consumed by UAV during flight is given by [50]:
where is the minimum power required to maintain flight, is a motor speed multiplier, T is the flight time, is the maximum motor power, and and denote the altitude and speed of UAV , respectively.
3.2.6. Packet Delivery Ratio (PDR)
It represents the reliability of data transmission across the network. The PDR can be mathematically defined as follows [51]:
where is the number of packets received at destination nodes, and is the number of packets sent by source nodes.
4. Metaheuristic Algorithms in UAV Optimization
This section presents an overview of MHAs as a promising approach to solving the UAV node placement problem [52,53,54,55,56,57,58,59,60,61]. The emphasis is placed on their key advantages over conventional optimization methods, as well as the fundamental principles that govern their operation. Over the past decade, MHAs have gained widespread popularity due to their effectiveness in tackling NP-hard problems and their ability to efficiently explore complex, high-dimensional search spaces. They are recognized as computationally efficient tools capable of delivering high-quality solutions while maintaining robustness and ensuring convergence [62,63,64,65,66,67,68,69,70,71].
Compared to traditional optimization techniques, which often struggle with the computational demands of NP-hard problems, MHAs offer several distinct benefits, including ease of implementation, global search capability, effective constraint handling, and suitability for parallel processing. As a class of high-level optimization strategies, meta-heuristics are specifically designed to find near-optimal solutions in cases where exact methods are impractical due to the vast size or complexity of the solution space [72,73,74,75,76,77].
Many of these algorithms draw inspiration from natural phenomena, such as evolutionary biology [78,79,80,81,82,83], swarm behavior [84,85,86,87], or neighborhood-based search patterns. Originating from basic heuristic methods rooted in trial-and-error, meta-heuristics have evolved to incorporate both randomization and local search techniques, thereby enhancing their adaptability and performance across a wide range of optimization tasks [88,89,90].
Two key components characterize meta-heuristics: intensification, which focuses the search around promising regions, and diversification, which introduces randomness to explore the broader solution space and avoid premature convergence to local optima. Although they do not guarantee discovery of the global optimum, meta-heuristics are highly effective at delivering high-quality, feasible solutions within practical computational limits [91,92].
Due to their balance between solution quality and computational efficiency, meta-heuristics have been widely adopted across various fields [93,94,95,96]. In this article, MHAs are categorized into four groups: Local Search-Based Algorithms, Evolutionary Algorithms, Nature-Inspired Algorithms, and Hybrid Algorithms, as illustrated in Figure 12.
4.1. Evolutionary Algorithms
Evolutionary Algorithms (EAs) are population-based optimization techniques that leverage Darwin’s theory of natural selection to guide the search process. These meta-heuristic approaches are designed to solve complex optimization problems that are not easily addressed using traditional linear programming techniques. EAs operate on the principle of biological evolution, where a population of potential solutions is generated and iteratively refined over successive generations. The effectiveness of each solution is evaluated using a fitness function, which quantifies its quality. Through repeated variation and selection, the population evolves toward improved solutions [97]. Evolutionary algorithms are primarily categorized into two main branches: Genetic Algorithm (GA) and Differential Evolution (DE). Among these, GA is the most widely utilized and is recognized as one of the most effective methods for solving a wide range of optimization problems.
GA is a well-established meta-heuristic inspired by natural selection and the principle of “survival of the fittest.” Introduced by J.H. Holland [98], GA evolves a population of candidate solutions using genetic operators such as selection, crossover, and mutation. Solutions are typically encoded as binary strings, with each chromosome representing a point in the search space. A fitness function evaluates the quality of each chromosome, guiding the evolutionary process. Starting from a randomly initialized population, successive generations are produced by preferentially selecting fitter individuals, recombining their genetic material through crossover, and introducing mutations to maintain diversity and avoid premature convergence. GA often employs adaptive mechanisms to adjust crossover and mutation rates dynamically, balancing exploration and exploitation. Its ability to perform global search and evaluate multiple solutions in parallel makes GA a versatile tool for complex optimization problems across various domains [99]. The algorithm that summarizes this working principle is presented in Figure 13.
DE, introduced by Storn and Price [100], is another population-based evolutionary algorithm that shares an iterative structure with GA but relies on different variation operators. In each generation, DE creates a mutant vector by adding the scaled difference between two randomly chosen population vectors to a third vector; it then performs crossover to blend this mutant with the current candidate, forming a trial vector. Selection chooses the solution with the better objective value between the parent and the trial to carry forward to the next generation. This simple yet powerful cycle repeats until a predefined stopping criterion is satisfied. Owing to its simplicity, robustness and adaptability, DE is now a standard tool for solving complex global-optimization problems in science and engineering [101]. The step-by-step algorithm of DE is summarized in Figure 14.
4.2. Nature-Inspired Metaheuristic Algorithms
Nature-Inspired Metaheuristic Algorithms (NIMAs) are optimization techniques inspired by natural phenomena, designed to solve complex, non-linear problems through iterative exploration and exploitation of the solution space. They often use populations of simple agents whose collective behavior leads to effective search strategies. Yang [102] played a key role in formalizing many of these algorithms, outlining their structures and applications. NIMAs are typically classified into swarm-based and physics-based algorithms, each mimicking behaviors like animal swarming or physical laws to guide the search toward optimal solutions [103].
Swarm-based NIMAs are optimization techniques modelled on the collective behavior of social organisms such as insects, birds and fish. First proposed by Beni and Wang [104] for cellular robotic systems, swarm intelligence (SI) has matured into a powerful paradigm for tackling complex search problems. A hallmark of SI is its decentralized control: simple agents interact only locally and obey elementary behavioral rules, yet intelligent global behavior emerges through self-organization and division of labor. Owing to this property, swarm-based NIMAs offer simplicity, flexibility and strong global-search capability, making them well suited to dynamic or large-scale optimization tasks. Their applications include path planning, scheduling, clustering, load balancing, wireless communication, IoT systems and robotics [105]. The generic workflow of a swarm-based NIMA is outlined in Figure 15.
Physics-based NIMAs, in contrast, are inspired by physical laws and processes such as gravitational attraction, thermal motion, energy dissipation, and equilibrium dynamics, which they use to iteratively refine candidate solutions. One of the earliest and best-known examples is SA, which mimics the controlled cooling of a material to probabilistically escape local optima and approach a global optimum. More generally, these algorithms emulate systems governed by physical forces, thereby maintaining an effective balance between exploration and exploitation. By abstracting physical behaviour into computational form, physics-based NIMAs provide robust, scalable approaches for tackling complex and nonlinear problems in engineering design, control systems and machine learning [106]. The overall workflow of a typical physics-based NIMA is depicted in Figure 16.
4.3. Local-Search-Based Algorithms
Local-search-based algorithms are commonly employed to solve combinatorial optimization problems, where the objective is to identify the best solution within a finite set of possibilities. These algorithms begin with an initial solution and iteratively improve it by applying small modifications called neighborhood operations. The neighborhood consists of all solutions that can be reached from the current solution through such changes. When none of the neighboring solutions offer an improvement, the current solution is deemed a local optimum. However, this local optimum may not represent the global best solution. To overcome the challenge of becoming trapped in local optima, various techniques have been developed. These include accepting worse solutions temporarily through random changes, avoiding recently visited solutions, and exploring different neighborhood structures. By employing these strategies, local search algorithms enhance their exploration capabilities and improve the likelihood of finding the global optimum [107]. The general workflow of a local-search-based meta-heuristic algorithm is summarized in Figure 17.
4.4. Hybrid Meta-Heuristic Algorithms
Hybrid meta-heuristic algorithms represent a promising research direction that combines the strengths of multiple nature-inspired meta-heuristics to overcome the limitations of individual methods and enhance overall optimization performance. By integrating complementary strategies such as the global exploration capabilities of swarm-based algorithms and the local exploitation strengths of physics-based methods, hybrid models achieve a more balanced and effective search process. This balance improves convergence speed, solution accuracy, and robustness. For example, swarm intelligence techniques like PSO excel at rapid global exploration, while physics-based methods such as SA provide powerful mechanisms to escape local optima through controlled randomization. A hybrid approach leverages the exploratory power of one algorithm while refining solutions using the intensification mechanisms of another. These combinations can be implemented through parallel, sequential, or cooperative hybridization strategies. In UAV communication networks, hybrid meta-heuristics have demonstrated significant potential for solving complex problems, including energy-aware node placement, delay-sensitive task offloading, and adaptive routing. Overall, the hybridization paradigm not only enhances algorithmic flexibility and adaptability but also leads to the development of more generalizable and efficient optimization solvers applicable across a wide range of domains [108]. The step-by-step procedure of a typical hybrid meta-heuristic algorithm is outlined in Figure 18.
5. Metaheuristic Algorithms for UAV Placement: Open Problems and Future Challenges
This section presents an analysis of meta-heuristic algorithms applied to the UAV node placement problem. The discussion is organized by algorithmic families, such as nature-inspired meta-heuristics, evolutionary algorithms, hybrid approaches, and local-search-based methods, highlighting the key strengths and current limitations of each category. Open research problems and potential directions for future enhancement are also identified in order to support the development of more robust and adaptive solutions for UAV network deployment.
5.1. GA Based Algorithms
GAs have been widely adopted in UAV communication networks due to their global search capability, adaptability to various constraints, and suitability for complex multi-objective optimization problems. Their population-based nature and stochastic operators allow for efficient exploration of large, nonconvex search spaces, making them effective for UAV placement in both centralized and distributed architectures.
In [52], a GA optimized UAV topology for throughput enhancement in FANETs, treating UAVs as routers forming a dynamic wireless mesh. The algorithm used a tailored encoding and adjacency-based fitness function while enforcing movement constraints via the Radius of Position Constraint (RPC) and Radius of Particle Size (RPS). The results showed that increasing RPC enhanced throughput by expanding search space, while lower RPS yielded finer control. While promising, the study assumes a fixed UAV altitude and ideal wireless conditions, which may limit its generalizability in more variable real-world scenarios.
In [79], a GA was used to jointly optimize UAV placement and user association in a high-altitude platform (HAP)-UAV hybrid system. Initial UAV positions were estimated using K-means clustering to enhance convergence speed. The GA-based solution improved throughput by 32.5% compared to the HAP-only baseline under a 100 m user distribution radius and maintained flexibility by enabling global user association. While effective in wide-area and sparse deployments, the method relied on perfect LoS assumptions and static users.
In [78], a Multi-Layout Multi-Subpopulation GA (MLMPGA) was proposed for UAV placement with multi-objective optimization of coverage, fault-tolerance, and redundancy. Simulations with 50–125 ground nodes and 10–18 UAVs showed that MLMPGA outperformed standard GA, PSO, and Hill Climbing in more than 80% of scenarios. It achieved the best coverage and fault-tolerance for 125 nodes with 14 UAVs, and superior redundancy for 75 nodes with 18 UAVs. Its adaptive layout-based evolution, using distinct mutation and crossover rates per subpopulation, improved the exploration–exploitation balance and avoided local optima. However, the increased computational cost may limit real-time use, favoring offline optimization.
In [96], an optimization framework for Flying Backhaul Networks (FBNs) employed Nondominated Sorting Genetic Algorithm II (NSGA-II) for UAV placement and an inner GA for routing. Simulations over a 500 × 500 m^2^ area with 24 ground nodes and traffic loads from 30–150 kbps demonstrated that NSGA-II produced Pareto-optimal placements. To support a 720 kbps load, only four UAVs were required, while two sufficed for 240 kbps. The strategy consistently maintained average PDRs above 0.8, even under higher loads. These results emphasize the framework’s ability to minimize infrastructure while ensuring reliable, interference-aware UAV deployments under dynamic traffic demands. However, the framework does not consider UAV mobility or time-varying topologies, limiting its applicability to dynamic FBN scenarios.
Generally, GA-based algorithms are highly effective in maximizing coverage and throughput, reducing average delay, enabling adaptive topology control, and supporting coordinated UAV deployments across various scenarios. Their flexibility and strong performance in solving joint optimization tasks make them well-suited for scalable UAV networks. In addition, GAs can accommodate heterogeneous UAV types and heterogeneous traffic demands, which is essential for practical deployments involving both aerial and terrestrial users.
To further enhance deployment realism, future research should incorporate energy constraints, interference modeling, and mobility-aware optimization. Integration with machine learning models to predict traffic patterns and environmental dynamics can also improve responsiveness in real-time UAV placement. Moreover, combining GAs with other techniques like reinforcement learning or game theory could help in addressing the dynamic nature of aerial networks while maintaining scalability.
5.2. DE-Based Algorithms
DE is a robust evolutionary optimization technique known for its simplicity, fast convergence, and effectiveness in solving complex, multi-dimensional problems. In the context of UAV node placement, DE has been successfully applied to optimize deployment strategies in dynamic and large-scale environments. It performs well in continuous search spaces, requires few control parameters, and avoids premature convergence better than some traditional evolutionary methods.
In [54], the authors proposed DEVIPS, a DE variant with Variable Population Size, designed for energy-efficient UAV deployment in IoT data collection systems. By converting the variable-length optimization problem into a fixed-length representation, DEVIPS enabled the use of traditional DE operators while maintaining adaptability across different scenarios. It achieved up to 17.44% lower energy consumption compared to other evolutionary algorithms such as VLGA, fGA, and JGGA. However, the use of fixed-length encoding may reduce flexibility in environments with frequently changing distributions of ground nodes.
In [83], DE was applied in a joint UAV placement and task scheduling framework for a multi-UAV MEC architecture. While DE optimized UAV positions, a Deep Reinforcement Learning (DRL) module managed task scheduling. The DE algorithm achieved the best deployment fitness score (−5.0) within 50 iterations, outperforming GA and PSO. However, its reliance on near-optimal task assignment strategies can introduce scalability challenges in highly dynamic or large-scale IoT scenarios.
In [22], the DE was applied to optimize the contention window (CW) size in FANETs, yielding notable numerical gains. Under CSMA/CA, DEA achieved a throughput of 7.481 Mbps with 10 UAVs, outperforming the traditional MAC’s 7.0797 Mbps. At 30 UAVs, DEA sustained a throughput of 7.4089 Mbps, and when the UAV count exceeded 35, it recorded the lowest packet drop rate (PDR) among the tested algorithms. DEA also demonstrated faster computation than CUCO and HBA. These results confirm DEA’s effectiveness for real-time MAC parameter tuning in dense UAV networks.
Generally, DE-based approaches show strong performance in optimizing UAV placement for energy efficiency, balanced task distribution, and adaptability to complex deployment conditions. Their differential mutation and crossover mechanisms make them well-suited for exploring continuous and high-dimensional search spaces. DE variants have also demonstrated robustness in handling multi-objective formulations, such as jointly minimizing energy consumption and maximizing coverage or link reliability. Moreover, DE-based algorithms are particularly effective in achieving good coverage and connectivity, and have shown respectable throughput performance, especially in scenarios requiring adaptive topology formation under resource constraints.
To improve their practicality in real-time and dynamic networks, future research should explore hybrid strategies that integrate DE with online learning, real-time adaptation, and consideration of UAV constraints such as mobility and coordination overhead. In addition, incorporating environment-sensitive mechanisms, such as dynamic obstacle avoidance, channel fading models, and traffic pattern prediction, can significantly enhance the realism and robustness of DE-based UAV deployment strategies.
5.3. Swarm-Based Algorithms
Swarm-based algorithms such as PSO and GWO are frequently applied in UAV communication networks due to their ability to efficiently explore large solution spaces and adapt to dynamic topologies. Their decentralized structure and fast convergence make them particularly suitable for time-sensitive and mobile scenarios where centralized control is impractical.
In [70], a PSO-based topology formation strategy was introduced for FANETs, prioritizing graph-theoretic metrics like node connectivity and bridge count rather than traditional distance-based criteria. This approach significantly enhanced fault tolerance by increasing the average node degree from 3.5 to 5, eliminating network bridges, and maintaining full connectivity in all simulation runs while reducing packet loss by 10–80%. However, increased connectivity led to higher interference levels, reflected by rises in maximum clique size and chromatic number.
In [65], a PSO-based algorithm was proposed for dynamic 3D placement of LTE drone-mounted base stations serving machine-type communication devices (MTCDs). The method improved system throughput from approximately 15,000 Kbit/s to over 28,000 Kbit/s and reduced the deadline-missing ratio from 66% to below 36% while achieving a mean SNR around −2.3 dB and lowering computational complexity, making it suitable for real-time deployment. Despite these advantages, the algorithm exhibited performance degradation under highly dense or dynamic conditions due to limited coordination capabilities.
In [60], a GWO-based method was proposed for 3D placement of drone-mounted base stations in 5G networks to maximize downlink coverage. Using stochastic geometry to model SINR, the approach identified optimal drone positions under a coverage constraint. Simulations with 200 users in a 2 × 2 km^2^ area showed that 5 drones achieved 76% coverage, while 10 ensured full coverage. The method reduced infrastructure needs while maintaining high coverage probability, reaching up to 82.5%. However, effects such as signal blockage and drone overlap were not considered and are suggested for future research.
In [88], a PSO-based algorithm was applied for UAV base station placement in open areas using the Hata–Okumura model for path loss estimation. The method determined optimal drone positions and quantities based on antenna ranges. With eight UAVs, coverage improved from 26% (200 m range) to 69% (400 m) and 87% (500 m), efficiently covering an 8 km^2^ area. Higher antenna ranges eliminated the need for additional drones. The study also analyzed path loss over 800–1500 MHz, showing that higher frequencies increased loss over long distances. However, the method may be less effective in environments with obstacles and rapidly changing channel conditions.
Generally, swarm-based algorithms demonstrate strong scalability and adaptability across various deployment sizes, offering fast and practical solutions for real-time UAV placement tasks. They are particularly effective in enhancing network connectivity, coverage, and throughput, making them highly suitable for mobile and emergency UAV scenarios, such as disaster recovery and temporary hotspot coverage. Their decentralized nature and self-organizing behavior enable efficient handling of dynamic topologies and intermittent links. However, swarm algorithms may be less ideal for latency-sensitive applications due to potential convergence delays and limited fine-tuning capabilities in dense or highly constrained environments.
To further improve their applicability, future research could focus on incorporating interference-aware models, real-time adaptive control, and hybrid techniques that combine swarm intelligence with local refinements, meta-learning, or deep reinforcement learning. Integrating mobility prediction and task-aware placement strategies can improve responsiveness and resource allocation. Additionally, enhancing energy efficiency, inter-UAV coordination, and robustness to adversarial conditions (e.g., jamming, obstacles, and packet loss) will be essential for deploying swarm-based solutions in next-generation UAV networks operating under high mobility and environmental complexity.
5.4. Physics-Based Algorithms
Physics-based algorithms, such as Simulated Annealing (SA) and Deterministic Annealing (DA), are particularly effective for solving highly nonlinear and constrained optimization problems such as UAV placement. They are well suited for scenarios where flexible adaptation to dynamic conditions is required, such as in dense urban networks, wide-area ad hoc deployments, or temporary emergency setups. These algorithms offer a balanced trade-off between solution quality and computational cost, making them a practical choice for complex environments where UAVs are required to operate reliably under unpredictable constraints.
In [61], an SA-based algorithm was applied for 3D placement of multiple UAV-BSs to maximize coverage, avoid collisions, and meet user data rate requirements. The AI-driven approach dynamically adjusted UAV positions, enabling up to 95% of users to meet QoS targets, compared to 75% with static placement, and boosted throughput from to over bit/s for 500 users. However, the proposed method does not consider UAV hovering time limitations or user mobility, which may affect performance in dynamic environments.
In [64], the UAV placement problem in wide-area ad hoc networks was formulated as a clustering task using a distortion-based cost function and solved using Deterministic Annealing. The goal was to minimize the number of UAVs while maintaining full network connectivity. Simulations with 15 ground nodes showed that full connectivity can be achieved with only 5 UAVs. When additional constraints were introduced, such as covering at least six nodes per cluster or ensuring redundancy with two to three UAVs per cluster, the required number increased to six or seven. However, the method may face limitations when applied to larger-scale networks with higher node density or complex terrain variability.
In [73], energy-efficient resource allocation was addressed in a UAV-assisted full-duplex NOMA system supporting URLLC under finite blocklength constraints. The joint optimization of 3D UAV placement and power allocation was solved using a hybrid method combining SA and convex approximation. The algorithm achieved fast convergence and showed up to 90 percent improvement over HD-NOMA and OMA baselines. It approached infinite blocklength performance while using short packets and maintaining low latency, making it suitable for mission-critical and delay-sensitive applications.
In [81], SA was applied to optimize the number and placement of UAV base stations for large-area 5G coverage. SA demonstrated reliable convergence in medium-scale areas, achieving full coverage with 6 UAVs for , each covering around . However, SA required longer execution times (up to 1.2 s) and showed slower convergence compared to Genetic Algorithm (GA). Its performance degraded slightly in very large areas (less than ) due to a higher chance of local optima. Despite this, SA maintained acceptable coverage efficiency and produced consistent layouts under constraints, indicating its suitability for moderate-scale, time-tolerant UAV deployment scenarios.
Generally, physics-based algorithms offer a powerful framework for UAV placement under complex constraints, particularly in optimizing energy efficiency and latency-aware design. Inspired by physical phenomena such as gravitational forces, electromagnetism, or thermal dynamics, these algorithms can produce high-quality, near-optimal solutions with moderate computational cost. Their continuous space search capability and sensitivity to constraint dynamics make them well suited for fine-grained placement tasks, such as ensuring balanced coverage in urban or heterogeneous environments. However, they are not ideal for highly time-critical applications without enhancements such as warm-starting, hybridization with local search, or incorporation of predictive models to accelerate convergence.
Future work should focus on integrating real-time system feedback, adaptive load balancing, and energy-aware UAV control strategies to support scalable and resilient UAV networks under practical deployment conditions. Additionally, embedding physics-based models with mobility prediction, environment-aware path planning (e.g., obstacle fields or no-fly zones), and multi-objective optimization (e.g., trade-offs between coverage, latency, and energy) can significantly boost their robustness. Leveraging parallel or distributed implementations can further reduce execution time, enabling applicability in real-time and large-scale scenarios.
5.5. Local-Search-Based Algorithms
Local-search-based algorithms are particularly effective in constrained environments where rapid convergence to high-quality solutions is necessary. They are well-suited for centralized control architectures and scenarios with limited UAV resources, enabling fine-grained adjustments and deterministic improvements. Local search techniques like tabu search, hill climbing, and adaptive neighborhood search can be easily combined with global optimization methods or learning-based strategies to overcome local optima and enhance robustness. Their simplicity, flexibility, and low computational overhead make them practical for time-sensitive or resource-constrained UAV communication applications.
In [66], an adaptive local-search-based Arithmetic Optimization (LSAO) algorithm was proposed for UAV placement in MANETs. Combining adaptive switching, chaotic local search, and opposition-based learning, LSAO effectively balances exploration and exploitation. It achieves up to 100% coverage and connectivity across multiple test cases, with 87.02% coverage and a fitness of 36.57 using 10 UAVs. While delivering strong performance with limited UAVs, the algorithm shows moderate efficiency in energy use and load distribution.
In [90], a centralized UAV positioning algorithm was proposed for SDN-based UAV networks to maximize system throughput using a tabu search based technique. Leveraging flow demand and path data from the SDN controller, the algorithm iteratively optimizes UAV locations, achieving 10–67% throughput gains with an average of 26%. It reaches 95% of the optimal throughput in 190 iterations and 99% by 870. However, its performance declines in dynamic settings due to sensitivity to user mobility, requiring re-execution when throughput drops by 30%.
Generally, local-search-based algorithms offer high precision and interpretability in UAV placement tasks, particularly under centralized control and moderate-scale scenarios. They are especially effective at improving local performance metrics such as coverage or throughput with low computational overhead and fast convergence. While they can contribute to improvements in connectivity and latency, their effectiveness is often limited in highly dynamic or large-scale networks due to their tendency to converge to local optima. Nonetheless, their simplicity and responsiveness make them practical for constrained UAV communication environments.
To further improve their applicability, future research could explore hybrid frameworks that integrate local search with reinforcement learning or meta-heuristic strategies, as well as enhancements for handling dynamic mobility patterns, energy constraints, and real-time responsiveness in large-scale UAV networks.
5.6. Hybrid Algorithms
Hybrid algorithms are effective in solving complex UAV placement problems by combining the strengths of multiple optimization techniques. This integration enables a balance between global exploration and local refinement, resulting in improved solution quality, faster convergence, and more effective handling of multi-objective trade-offs. These algorithms offer enhanced robustness across diverse scenarios, including high mobility and dynamic network topologies, while maintaining consistent performance. Moreover, their adaptability allows for real-time adjustments to fluctuating network conditions, varying user demands, and UAV-specific constraints, making them particularly suitable for mission-critical and time-sensitive applications.
In [20], HGA-SA and HWWO-HSA, two hybrid algorithms, were introduced for placement of 3D UAVs in post-disaster networks, targeting optimal coverage, connectivity and resilience. By incorporating Taguchi parameter tuning and graph-based strategies, HGA-SA outperformed GA and HS by up to 12% in small-scale scenarios, while HWWO-HSA achieved a 23.2% utility gain in larger deployments. However, this improvement came at the cost of an 18.4% increase in computational time, making them less ideal for time-critical applications.
In [15], the authors proposed IMRFO-TS, a hybrid of Improved Manta Ray Foraging Optimization and Tabu Search, tailored for smart city UAV deployments. The algorithm balances energy use and load distribution while maintaining high coverage and connectivity. Tested across 52 scenarios, IMRFO-TS achieved up to 99.1% coverage, full connectivity, and minimal energy consumption, consistently outperforming eight baseline methods. A minor limitation of the approach is its relatively high computational complexity, which could restrict its effectiveness in real-time applications.
In [46], the authors proposed BR-ILS, a hybrid Iterated Local Search algorithm designed to solve the UAV placement problem formulated as a single-allocation p-hub median optimization. The method aims to maximize link capacity and optimize UAV positioning for efficient ground user coverage. Tested on various instance sizes (up to 200 users and 10 UAVs), BR-ILS consistently achieved near-optimal results in significantly reduced computation times compared to the CPLEX solver, showing up to 12.24% improvement over naive heuristics. Despite its strengths in scalability and solution stability, the method may be less effective for very small instances where exact solvers like CPLEX, given sufficient time, can produce superior results.
In [93], a hybrid PSO with Simulated Annealing (HPSO) was applied for UAV-borne IRS placement in mmWave multicast systems. The method jointly optimizes UAV positions and beamforming to maximize the minimum rate for user clusters. Simulations at 28 GHz with three user clusters showed that HPSO achieved a 24.6% higher minimum rate than conventional PSO and 32.8% over random placement. With 128 IRS elements, the minimum rate reached 2.4 Gbps, compared to 1.5 Gbps with 64 elements. The approach required only 40 iterations to converge versus 100 for exhaustive search, significantly reducing computation. These results demonstrate the effectiveness of integrating SA into PSO for robust, fair, and efficient UAV placement in high-frequency environments. Despite this improvement, the method’s performance may degrade with a rapidly changing user distribution, requiring real-time adaptation.
Generally, hybrid algorithms demonstrate superior performance across diverse deployment scenarios, offering robust and scalable solutions for multi-objective UAV placement. By combining the strengths of multiple optimization strategies, they effectively balance trade-offs between coverage, connectivity, energy efficiency, and latency. Their flexibility and optimization power make them particularly well-suited for complex and dynamic environments such as disaster zones or smart cities. Hybrid algorithms enhance solution quality, robustness, and adaptability, maintaining consistent performance even under high mobility and network variability. They are also effective in improving Quality of Service (QoS) metrics such as throughput, packet delivery ratio, and link stability, especially when combining global search with local refinement methods.
However, to fully enable real-time deployment, further research is needed to reduce execution time and improve responsiveness. To further advance their applicability, future research could explore lightweight hybridization strategies, hardware acceleration techniques (e.g., GPU or FPGA-based computation), and the integration of learning-based components for enhanced adaptability in highly dynamic and large-scale UAV networks. Designing modular hybrid frameworks that can be dynamically reconfigured based on network conditions would improve flexibility and operational efficiency in practical deployments.
Moreover, future hybrid algorithms could be developed for UAV networks and low-altitude systems [109], incorporating emerging technologies such as intelligent reflecting surfaces (IRSs) [110], rate splitting multiple access (RSMA), and integrated sensing and communication (ISAC) [111] to enhance network performance in terms of capacity, reliability, and spectral efficiency. In addition to these physical- and medium-access-layer innovations, there is increasing interest in leveraging large AI models to support autonomous decision-making, adaptive resource allocation, and real-time network optimization in UAV-assisted systems. Large AI models, particularly those trained on extensive communication, mobility, and environmental datasets, can enable UAV networks to dynamically predict channel states, optimize node placement, adapt trajectories, and manage interference in complex and dense deployment scenarios. Such models can also facilitate context-aware beamforming, intelligent traffic offloading, and proactive fault prediction, advancing beyond traditional rule-based or shallow learning approaches.
Recent research [112] suggests that embedding large AI models within UAV networks can support a range of intelligent applications, including real-time situational awareness, coordinated multi-UAV control, and adaptive mission planning, which are critical for emerging use cases like disaster response, smart cities, and low-altitude economy ecosystems. These models can operate either on board high-capability UAVs or in distributed edge/cloud frameworks, balancing local responsiveness with global knowledge aggregation. Integrating AI capabilities with IRS, RSMA, and ISAC can further enhance network adaptability by enabling joint optimization across propagation environment shaping, multiple access strategies, and sensing-aided communication, leading to more resilient and efficient UAV communication systems.
Exploring large-AI-model-enabled UAV networks represents a promising research direction that complements hybrid algorithm development and emerging technologies, offering deeper insights into autonomous, intelligent, and adaptive low-altitude communication infrastructures.
Table 1 summarizes key studies that address UAV node placement problem, highlighting the distinguishing features of each algorithm along with the type of UAV communication network considered, the evaluation metrics, and the simulation platforms.
Table 2 presents an overview of selected meta-heuristic algorithms for UAVCN node placement optimization. It summarizes key studies that address the node placement problem of UAVCN, highlighting the performance summary of each.
While Table 1 and Table 2 provide a comprehensive overview of existing methods, the experimental evaluation uses the dataset described in [20] to compare a selected set of representative algorithms based on computational time and coverage, as illustrated in Figure 19 and Figure 20. The algorithms were executed in the Python environment using the publicly available implementations provided in [20], ensuring a uniform and reproducible computational framework. The analysis focuses on small- and medium-scale scenarios. Specifically, 6 test scenarios were considered: Scenario 1 with 10 nodes, Scenario 2 with 20 nodes, Scenario 3 with 30 nodes, Scenario 4 with 40 nodes, Scenario 5 with 50 nodes, and Scenario 6 with 60 nodes.
Figure 19 illustrates the computational time of five meta-heuristic algorithms, GA, HS, SA, HGA-SA, and HWWO-HSA, evaluated on a wireless mesh topology across six test scenarios. The results show that GA and HS consistently exhibit the lowest execution times, ranging approximately from 8100 to 9400 s, indicating that both algorithms require relatively modest computational resources and maintain stable performance as the network size increases. The SA algorithm demonstrates moderate computational cost, with execution times varying between roughly 10,500 and 12,000 s across the evaluated scenarios. In comparison, HGA-SA presents higher execution times, ranging from approximately 12,000 to 13,500 s, which can be attributed to the additional processing introduced by hybridization and multi-stage search operations. The HWWO-HSA algorithm exhibits the highest computational time among the evaluated methods, with execution times between roughly 15,000 and 15,500 s across all scenarios. While this approach achieves strong optimization performance, it also incurs increased computational overhead, likely associated with its multi-phase search structure and more complex update mechanisms.
Figure 20 illustrates the coverage performance of four meta-heuristic algorithms GA, HS, HGA-SA, and HWWO-HSA evaluated across six identical mesh-network test scenarios. Overall, the results reveal clear performance differences among the algorithms, highlighting variations in exploration capability and solution quality. HS consistently achieves the highest coverage across all scenarios, followed closely by HWWO-HSA, indicating that algorithms with strong or hybridized exploration mechanisms are more effective in identifying well-distributed UAV placements. HGA-SA demonstrates moderate coverage performance, reflecting a balance between local refinement and global search, albeit with slightly lower coverage compared to HS and HWWO-HSA. GA exhibits substantially lower coverage across all scenarios, suggesting limited exploration capability and reduced effectiveness in handling increasing network sizes under the considered conditions.
These results collectively indicate that enhanced exploration strategies and hybrid search designs play a critical role in improving coverage performance in mesh-based UAV deployment scenarios.
6. Conclusions
This comprehensive review underscores the pivotal role of MHAs in addressing the UAV node placement problem within UAVCNs, a task recognized as NP-hard due to its multidimensional optimization nature. UAVCNs, through their dynamic, scalable, and infrastructure-independent architectures, have introduced new possibilities for maintaining connectivity in constrained or rapidly changing environments. However, the challenge of determining optimal node deployment remains central, with direct implications for coverage quality, link reliability, network throughput, latency, and energy consumption.
Metaheuristic approaches ranging from evolutionary algorithms and swarm intelligence to physics-based and hybrid models have shown themselves to be practical tools for handling the complexity of this problem. Their strength lies in flexibility, the ability to adapt to changing conditions, and their competence in finding near-optimal solutions where deterministic methods may become computationally infeasible. In many applications, these algorithms are favored for their capacity to explore diverse solutions and adjust to different deployment scenarios, including urban layouts, rural terrains, and disaster zones.
The selection of an appropriate algorithm typically depends on the problem’s operational context. Factors such as mission goals, environmental dynamics, platform constraints, and performance priorities play a significant role in determining algorithm suitability. For instance, certain algorithms may perform better in sparse environments where wide coverage is key, while others may be more efficient in dense scenarios requiring careful load balancing and minimal energy consumption.
An increasing interest in hybrid and adaptive algorithms suggests a shift toward more context-aware optimization strategies. These methods aim to combine the strengths of multiple meta-heuristics such as global exploration with local refinement and sometimes integrate learning components to respond to user mobility or topological changes. While these developments offer potential benefits, challenges remain, especially in balancing conflicting objectives like energy efficiency and latency or ensuring real-time responsiveness under uncertain conditions.
Future work may focus on enhancing these methods with lightweight learning modules, cross-layer awareness, real-time feedback, and hybrid optimization strategies to better support emerging applications in smart cities, emergency response, and beyond. In addition, the integration of MHAs with edge computing paradigms, 6G-enabled UAV systems, and distributed intelligence frameworks can provide a foundation for ultra-reliable and low-latency decision-making. The development of hybrid MHA formulations that combine complementary search behaviors is expected to be particularly valuable in addressing the complexity and dynamic nature of UAV communication networks. Developing standardized benchmarks and reproducible evaluation frameworks will also be critical for the fair assessment and advancement of MHA-based solutions in practical UAVCN deployments.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1Zhexebay D. Skabylov A. Turlykozhayeva D. Bolysbay A. Turmaganbet U. Namazbayev T. Mingliang T. Real-time small object detection with YOL Ov 8n/8s and YOL Ov 11n/11s models in complex natural landscapes Phys. Sci. Technol.20251214215310.26577/phst 202512114 · doi ↗
- 2Smailov N. Nussupov Y. Taissariyeva K. Kuttybayev A. Baigulbayeva M. Turumbetov M. Hryhoriev Y. Lutsenko S. Identification of dangerous situations in the road infrastructure using unmanned aerial vehicles Technol. Audit. Prod. Reserv.202569710210.15587/2706-5448.2025.347074 · doi ↗
- 3Wang Q. Li W. Yu Z. Abbasi Q. Imran M. Ansari S. Sambo Y. Wu L. Li Q. Zhu T. An Overview of Emergency Communication Networks Remote Sens.202315159510.3390/rs 15061595 · doi ↗
- 4Chandran I. Vipin K. Multi-UAV networks for disaster monitoring: Challenges and opportunities from a network perspective Drone Syst. Appl.20241212810.1139/dsa-2023-0079 · doi ↗
- 5Hussain A. Li S. Hussain T. Lin X. Ali F. Al Zubi A.A. Computing Challenges of UAV Networks: A Comprehensive Survey Comput. Mater. Contin.2024811999205110.32604/cmc.2024.056183 · doi ↗
- 6Banafaa M.K. Pepeoglu O. Shayea I. Alhammadi A. Shamsan Z.A. Razaz M.A. Alsagabi M. Al-Sowayan S. A Comprehensive Survey on 5G-and-Beyond Networks with UA Vs: Applications, Emerging Technologies, Regulatory Aspects, Research Trends and Challenges IEEE Access 2024127786782610.1109/ACCESS.2023.3349208 · doi ↗
- 7Fotouhi A. Qiang H. Ding M. Hassan M. Giordano L.G. Garcia-Rodriguez A. Yuan J. Survey on UAV Cellular Communications: Practical Aspects, Standardization Advancements, Regulation, and Security Challenges IEEE Commun. Surv. Tutor.2019213417344210.1109/COMST.2019.2906228 · doi ↗
- 8Yazid Y. Ez-Zazi I. Guerrero-Gonzalez A. El Oualkadi A. Arioua M. UAV-Enabled Mobile Edge-Computing for Io T Based on AI: A Comprehensive Review Drones 2021514810.3390/drones 5040148 · doi ↗