Mutual information-based hierarchical NBV decision for active semantic visual SLAM under dynamic environments
Zhenyuan Yang, Ash Wan Yaw Sang, M. A. Viraj J. Muthugala, Mohan Rajesh Elara

TL;DR
This paper introduces a new active SLAM method that improves robot mapping in dynamic environments by using mutual information and better path planning.
Contribution
A real-time mutual information-based active SLAM approach with two NBV decision modules for dynamic environments.
Findings
The method effectively excludes dynamic objects from mapping while maintaining robustness.
Experiments show improved mapping efficiency and tracking in simulated and real-world scenarios.
The algorithm is suitable for real-world deployment in dynamic settings.
Abstract
Active Simultaneous Localization and Mapping (A-SLAM) technology enables a robot to autonomously plan its movements to build a comprehensive and accurate map of its surroundings. However, most existing SLAM algorithms are not robust in dynamic environments, as moving objects can negatively impact mapping and localization accuracy, making it difficult for the robot to keep tracking and fully understand its environment. While some semantic SLAM methods can identify and exclude dynamic objects, in active SLAM, excluding features without proper path planning carries significant risks of losing track. In this work, we propose a real-time mutual information-based active SLAM approach designed to enhance robustness in dynamic environments. The proposed method not only excludes dynamic objects from the mapping process but also integrates two Next-Best-View (NBV) decision modules to improve path…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
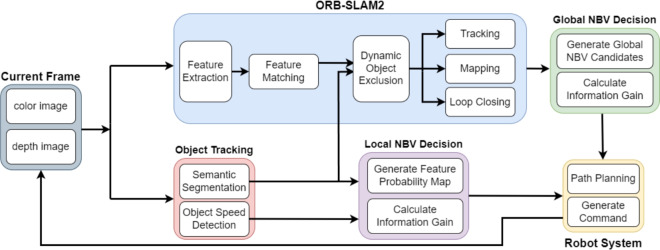 Figure 1
Figure 1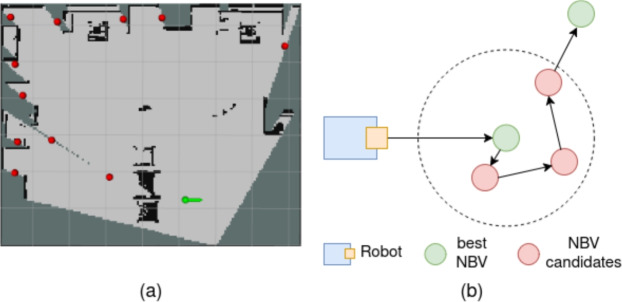 Figure 2
Figure 2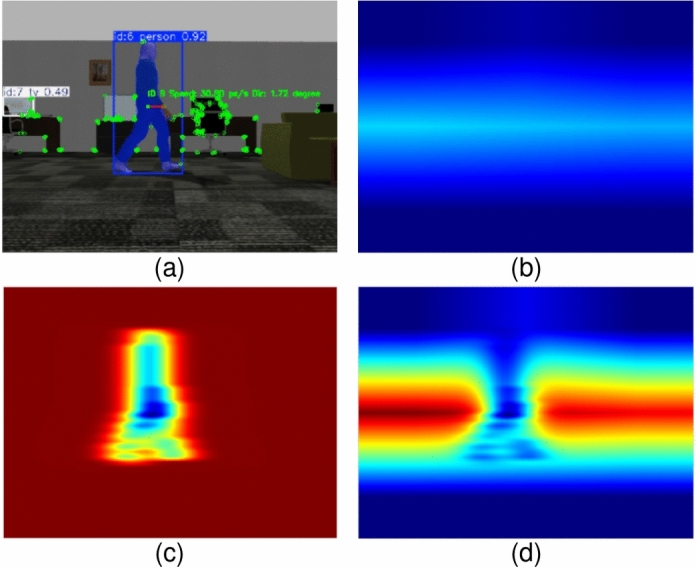 Figure 3
Figure 3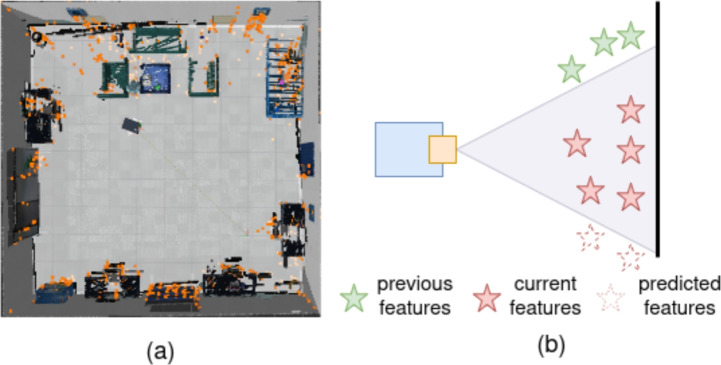 Figure 4
Figure 4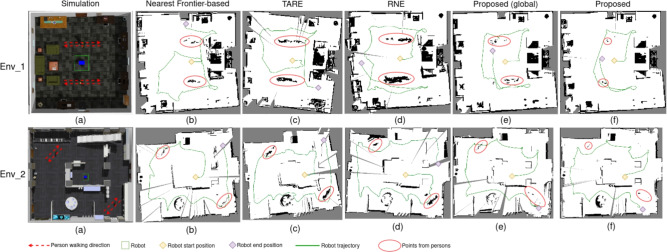 Figure 5
Figure 5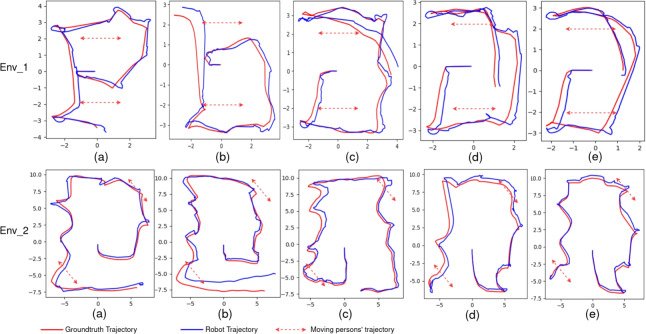 Figure 6
Figure 6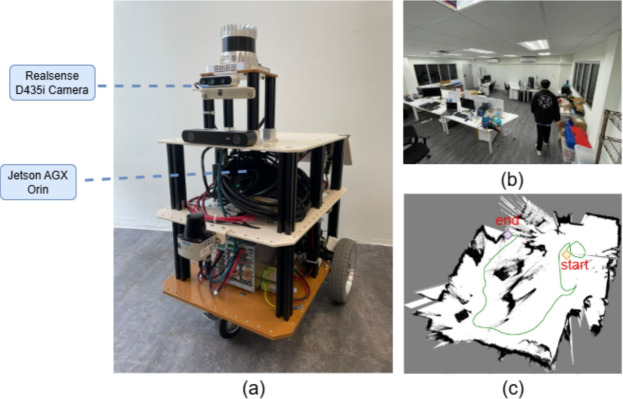 Figure 7
Figure 7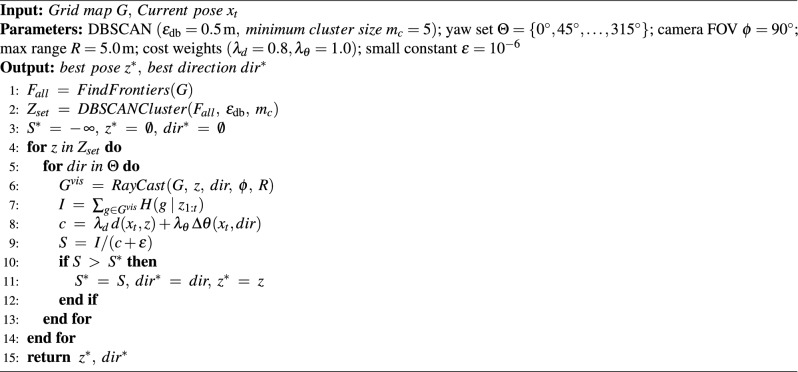 Figure 8
Figure 8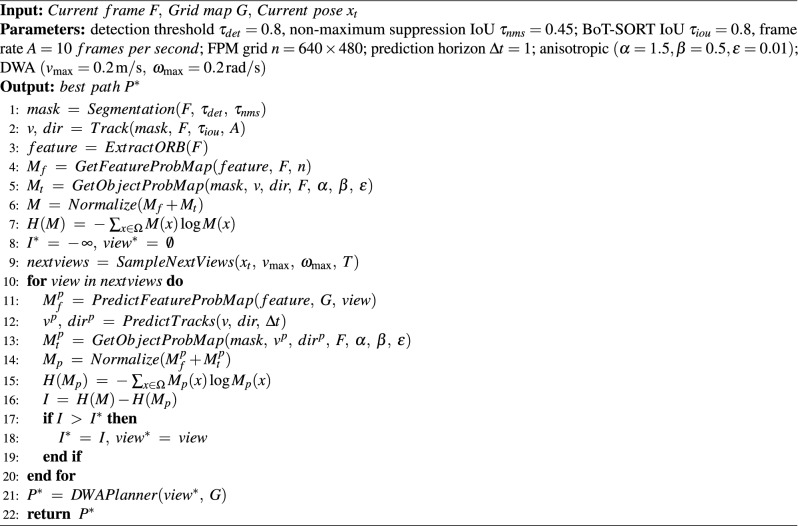 Figure 9
Figure 9Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotics and Sensor-Based Localization · Robotic Path Planning Algorithms · Autonomous Vehicle Technology and Safety