ImitateCholec: A Multimodal Dataset for Long-Horizon Imitation Learning in Robotic Cholecystectomy
Pascal Hansen, Ji Woong Brian Kim, Antony Goldenberg, Juo Tung Chen, Yuanzhe Amos Li, Anton Deguet, Brandon White, De Ru Tsai, Richard Cha, Jeffrey Jopling, Paul Maria Scheikl, Axel Krieger

TL;DR
ImitateCholec is a new dataset for training robotic systems to perform complex surgical tasks in cholecystectomy, using real-world data from porcine surgeries.
Contribution
The dataset introduces a large-scale, multimodal resource for long-horizon imitation learning in robotic cholecystectomy.
Findings
The dataset includes 18,000 demonstrations from 34 porcine surgeries, segmented into 17 surgical tasks.
It combines endoscopic video and kinematic data to support robust imitation learning for autonomous robotic systems.
The dataset enables training for phase-level autonomy and supports applications like error recognition and tool pose estimation.
Abstract
The growing global shortage of skilled surgeons underscores the need for intelligent, assistive technologies in the operating room. To address this challenge, we introduce ImitateCholec, a publicly available dataset specifically designed to advance autonomous robotic systems during the critical clipping and cutting phase of laparoscopic cholecystectomy. The dataset comprises over 18,000 demonstrations from 34 ex vivo porcine cholecystectomies, totaling approximately 20 hours of data. Each clipping and cutting phase recorded in the dataset is segmented into 17 distinct surgical tasks. ImitateCholec uniquely integrates endoscopic videos captured from multiple camera perspectives with comprehensive kinematic data acquired through the da Vinci Research Kit. Both optimal demonstration executions and recovery maneuvers were systematically recorded, enabling the training of imitation learning…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
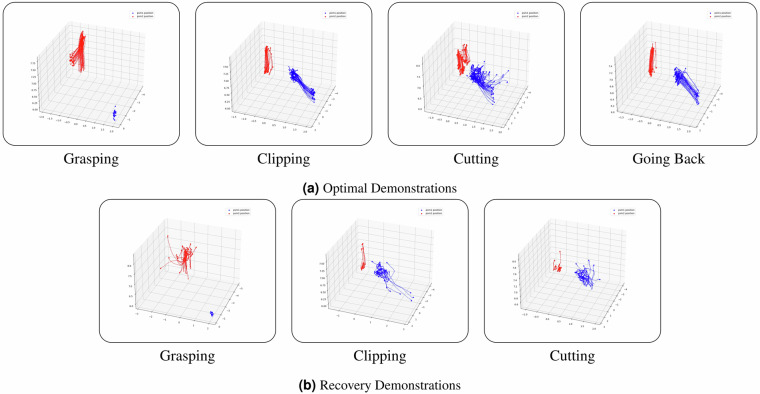 Figure 10
Figure 10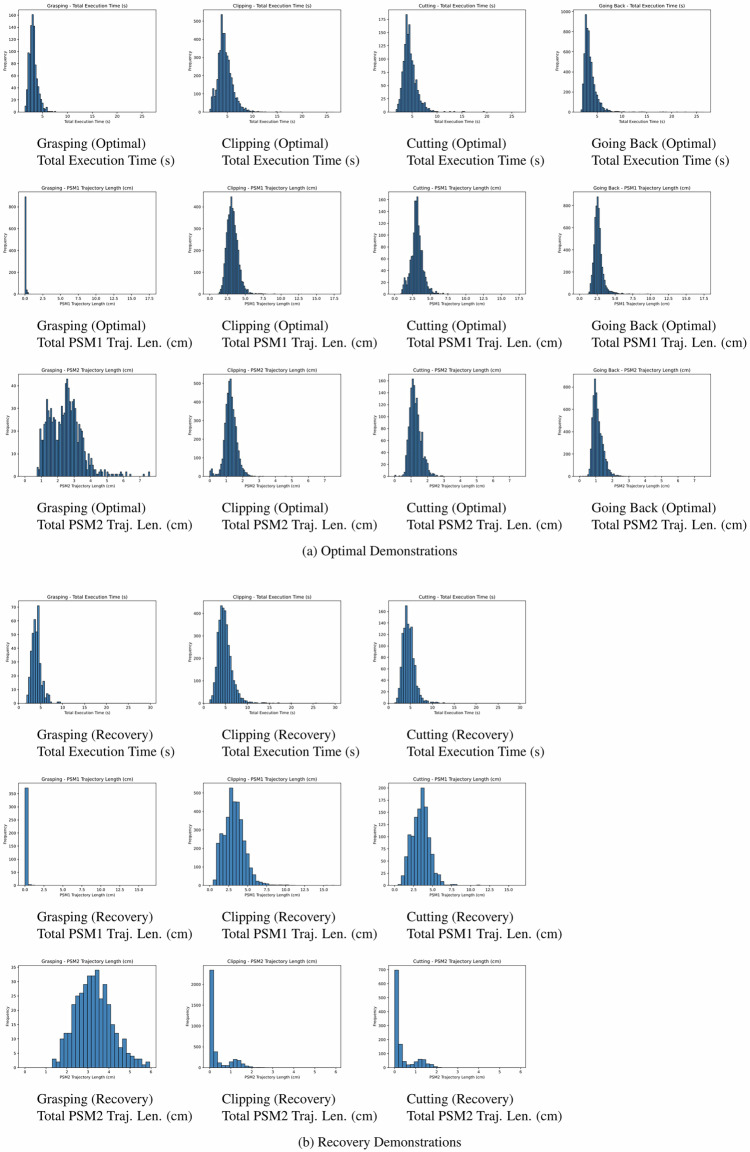 Figure 11
Figure 11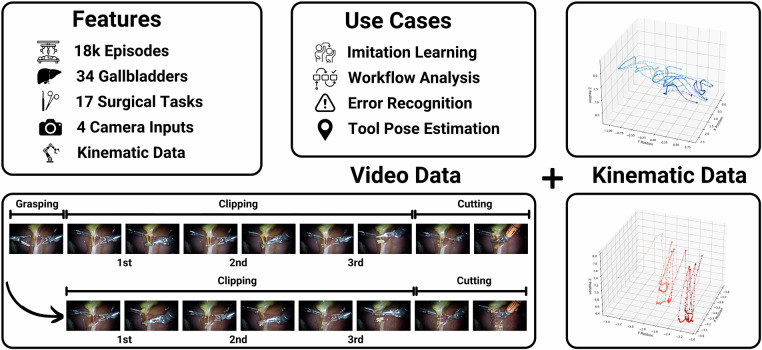 Figure 1
Figure 1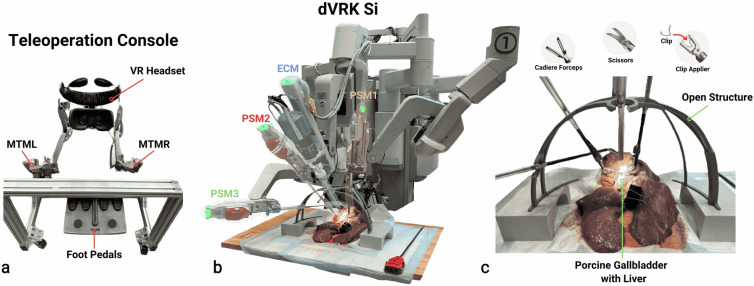 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4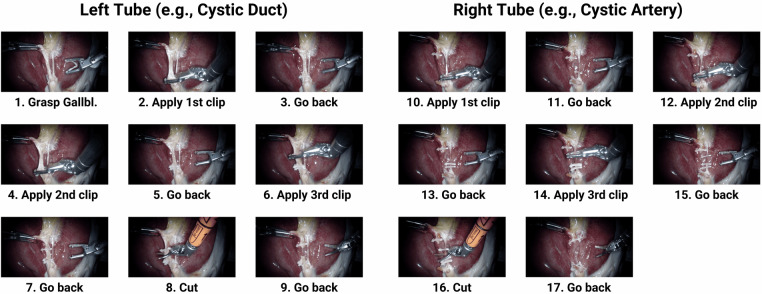 Figure 5
Figure 5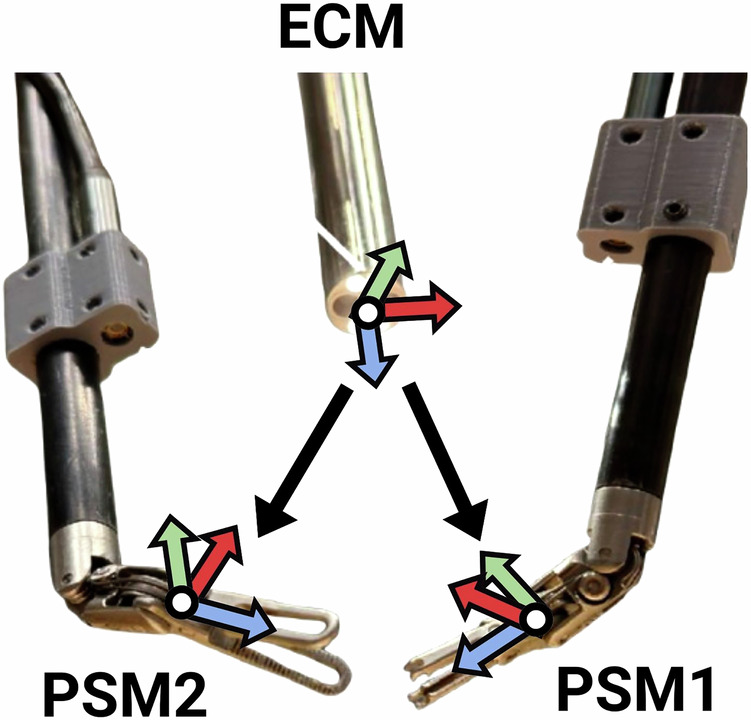 Figure 6
Figure 6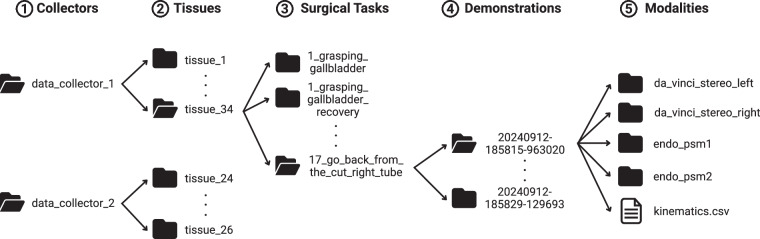 Figure 7
Figure 7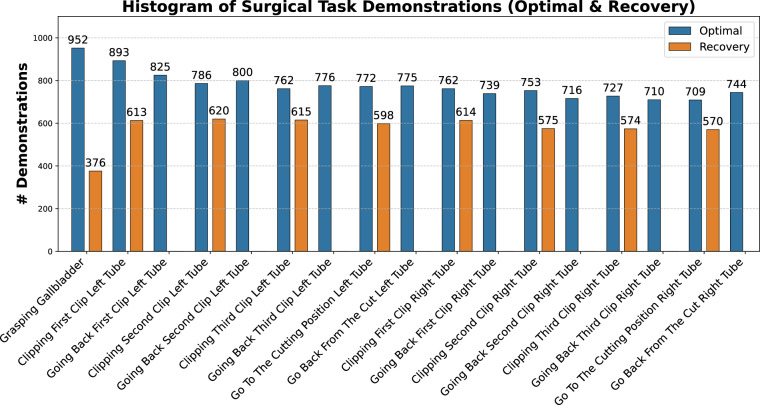 Figure 8
Figure 8 Figure 9
Figure 9Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsSurgical Simulation and Training · Soft Robotics and Applications · Minimally Invasive Surgical Techniques