Full-speed domain position sensorless control strategy for PMSM based on improved super-twisting sliding-mode observer and smooth transition optimization
Xia Zhang, Pengwei Li, Bo Wang, Minghao Lv, Liangtong Shi

TL;DR
This paper introduces a sensorless control strategy for PMSMs that enables smooth operation across all speed ranges using improved observers and signal injection techniques.
Contribution
A full-speed control algorithm combining improved super-twisting sliding-mode observers and high-frequency signal injection for smooth motor transitions.
Findings
The improved STSMO method achieves rotor position estimation errors of approximately 0.2 rad.
The Sine-weighted switching function enables smooth transitions from low to medium–high speeds.
Simulation results validate the effectiveness and superiority of the proposed control strategy.
Abstract
In the sensorless control of permanent magnet synchronous motors (PMSMs), achieving smooth transitions from low to medium–high speeds remains a significant challenge. Aiming at the problem that PMSMs cannot be smoothly transitioned to medium–high speed range, this paper proposes a full-speed range control algorithm based on the fusion of pulsating high-frequency injection (HFI) with square waves and an improved super-twisting sliding-mode observer (STSMO). The proposed method enables smooth and stable operation over the full speed range, with notable improvements observed during transitional phases. In the low-speed range, high-frequency current signal is obtained by injecting a high-frequency (HF) square-wave signal, and the signal is processed to obtain rotor position and speed information. For medium–high speeds, a variable-gain linear STSMO (VGLSTSMO) combined with an adaptive back…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
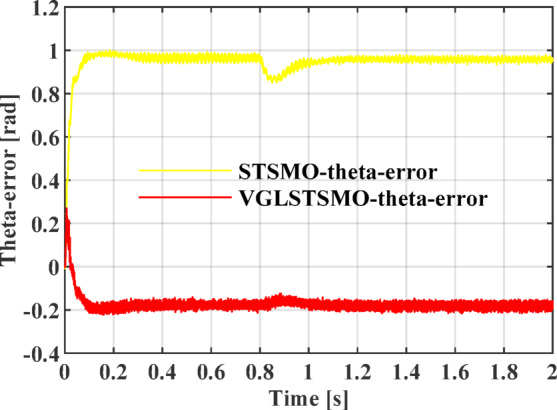 Figure 10
Figure 10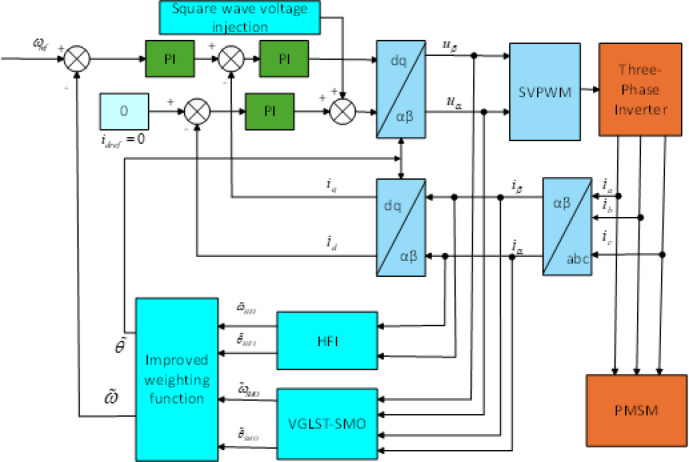 Figure 11
Figure 11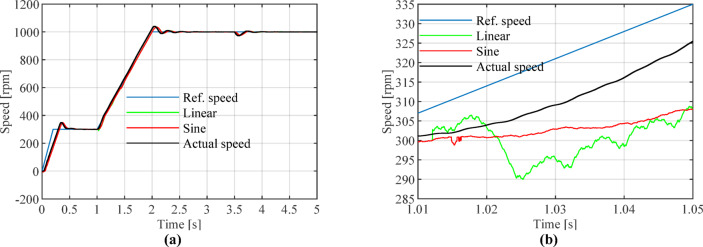 Figure 12
Figure 12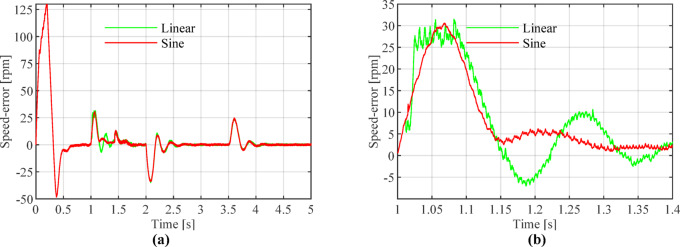 Figure 13
Figure 13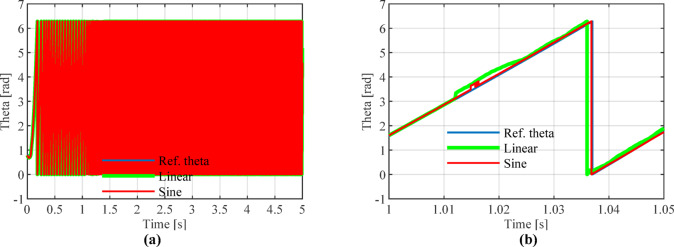 Figure 14
Figure 14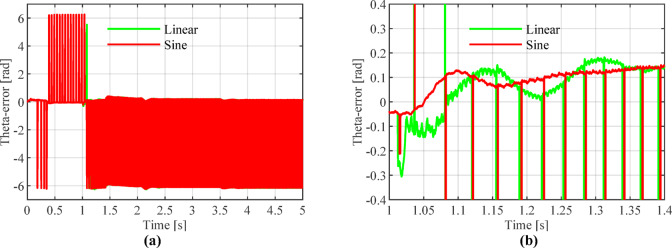 Figure 15
Figure 15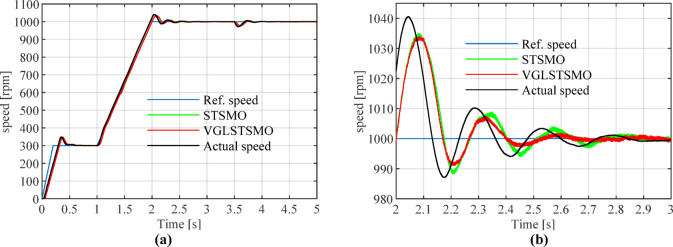 Figure 16
Figure 16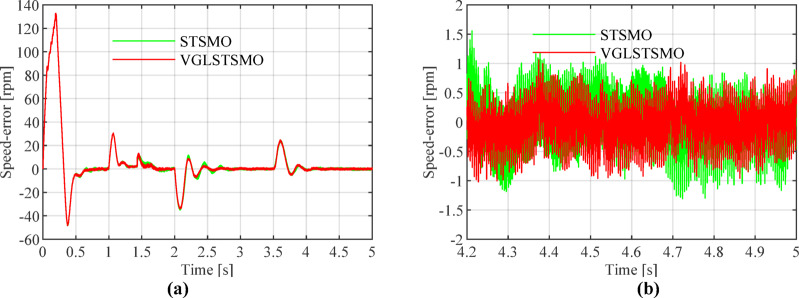 Figure 17
Figure 17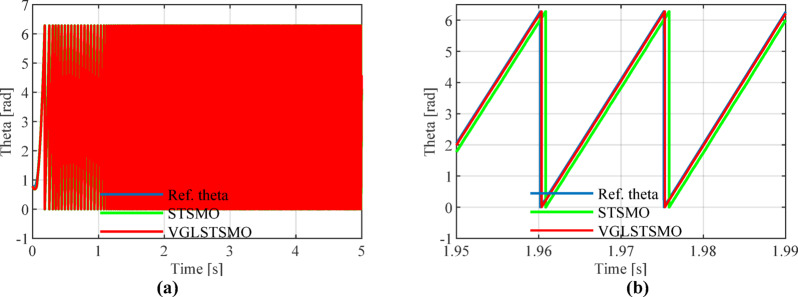 Figure 18
Figure 18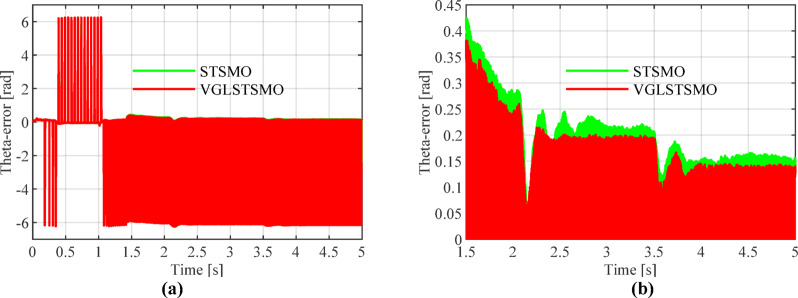 Figure 19
Figure 19 Figure 1
Figure 1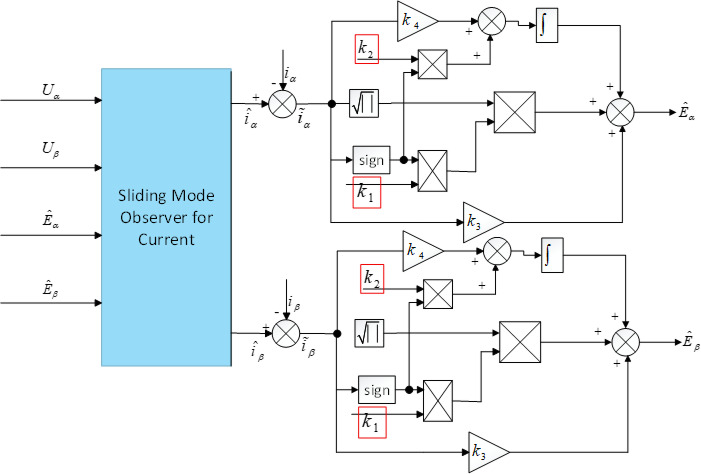 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4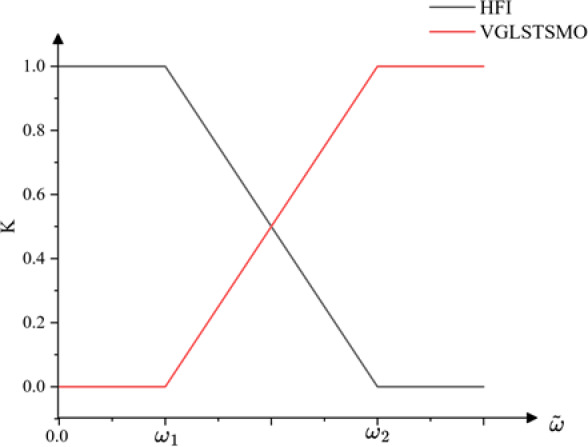 Figure 5
Figure 5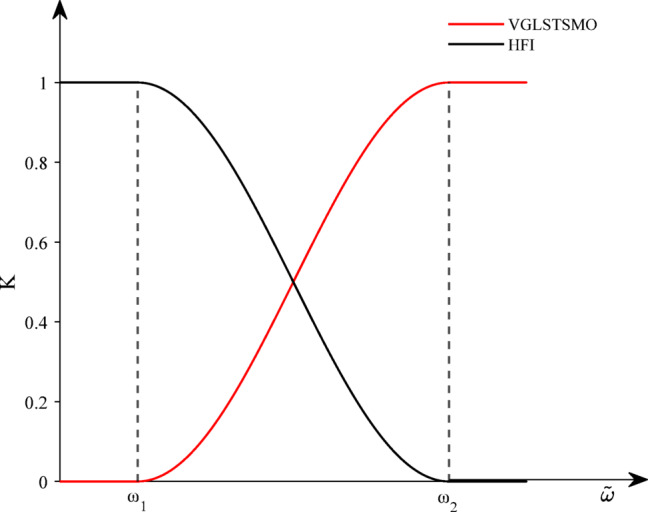 Figure 6
Figure 6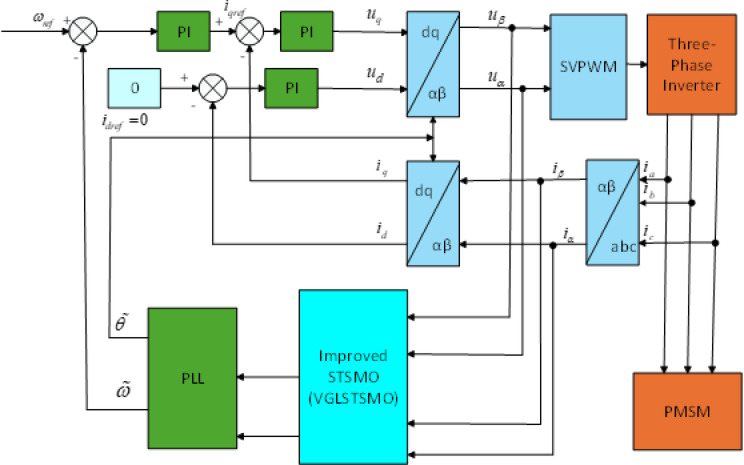 Figure 7
Figure 7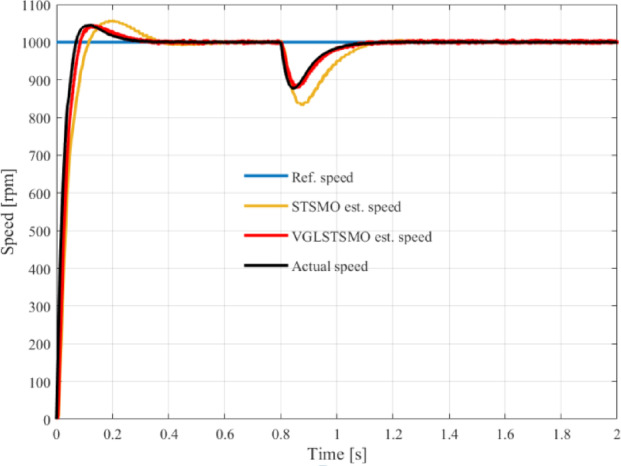 Figure 8
Figure 8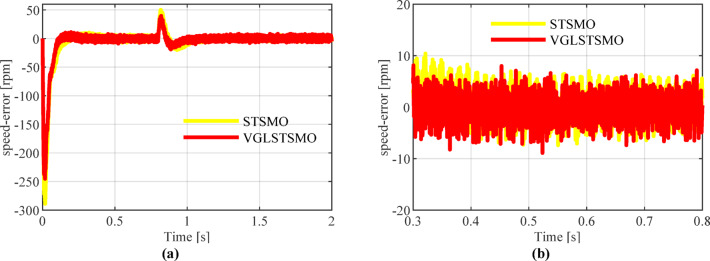 Figure 9
Figure 9Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsSensorless Control of Electric Motors · Electric Motor Design and Analysis · Magnetic Bearings and Levitation Dynamics