Generating Planar Trajectories for Neptunian System Exploration Using Motion Primitives
Giuliana E. Miceli, Natasha Bosanac

TL;DR
This paper presents a method for generating spacecraft trajectories in the Neptunian system using motion primitives and graph-based path planning.
Contribution
The novelty lies in applying motion primitives and constrained path search to design diverse spacecraft trajectories in the Neptune-Triton system.
Findings
Motion primitives derived from periodic orbits and manifolds enable automated trajectory generation.
The approach successfully designs high-energy and low-energy trajectories in the Neptunian system.
Optimized trajectories with impulsive maneuvers are generated for science orbit insertion and transfers.
Abstract
This paper uses a motion primitive approach to automatically generate constrained spacecraft trajectories for Neptunian system exploration. Motion primitives are generated as smaller building blocks of motion that summarize periodic orbits and arcs along stable and unstable manifolds of selected orbits in the Neptune-Triton circular restricted three-body problem. The sequential composability of these motion primitives is represented by a graph that also incorporates path and maneuver constraints. This graph is searched using a k-best paths algorithm to generate multiple motion primitive sequences. These sequences are transformed into an array of geometrically diverse initial guesses. After corrections and optimization, the resulting tradespace of continuous, constrained trajectories with impulsive maneuvers is analyzed. This approach is applied to two planar trajectory design scenarios…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
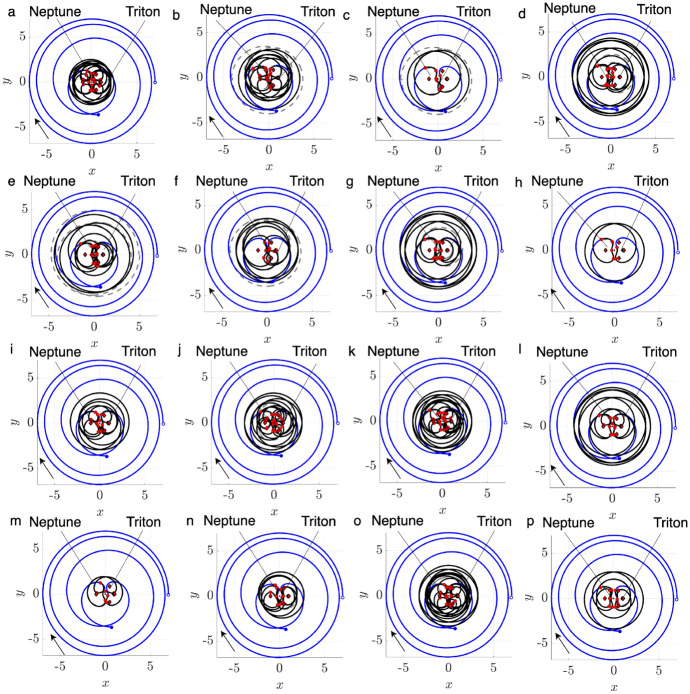 Figure 10
Figure 10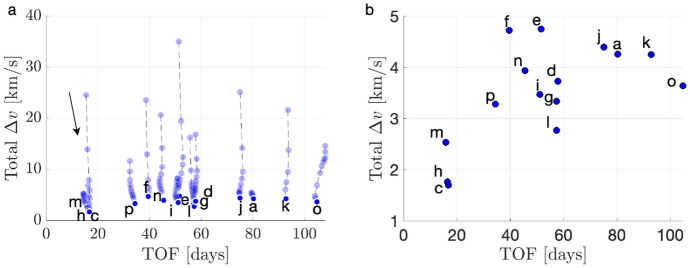 Figure 11
Figure 11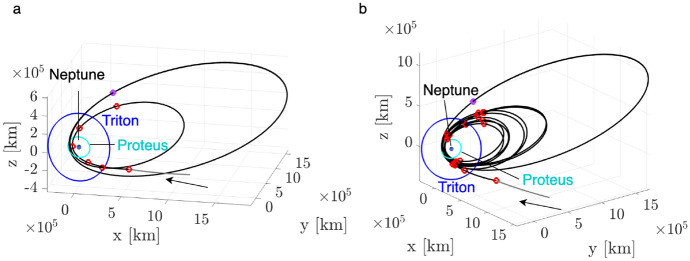 Figure 12
Figure 12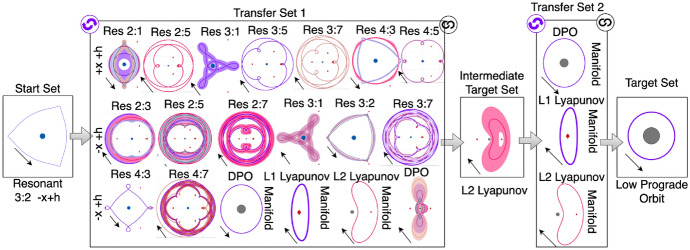 Figure 13
Figure 13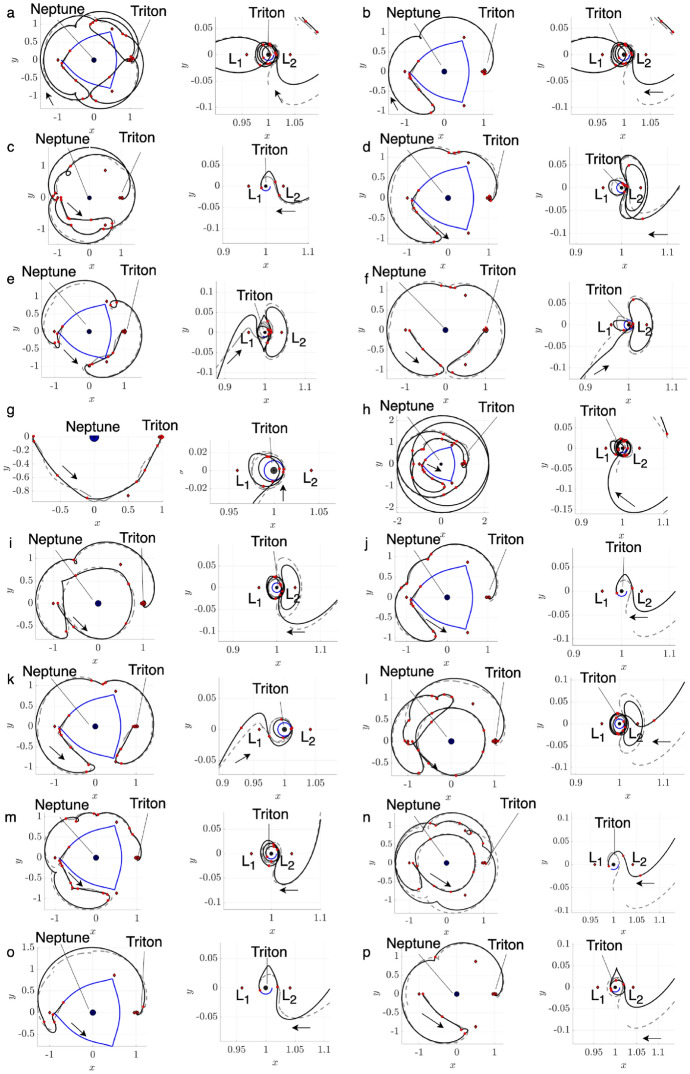 Figure 14
Figure 14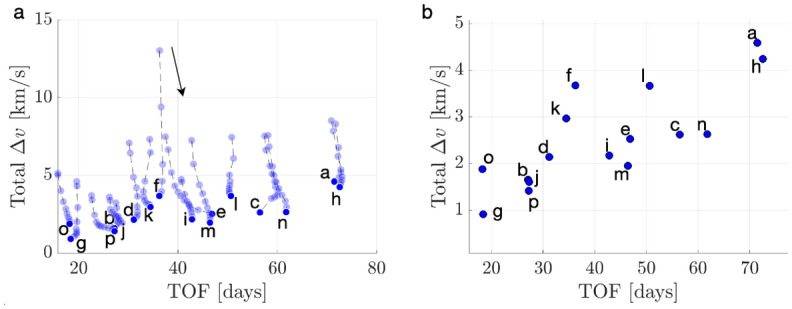 Figure 15
Figure 15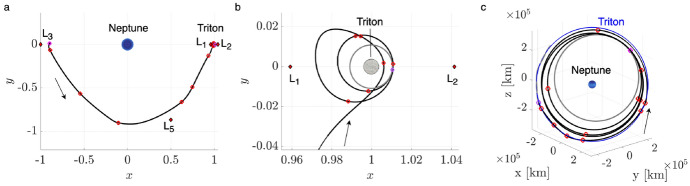 Figure 16
Figure 16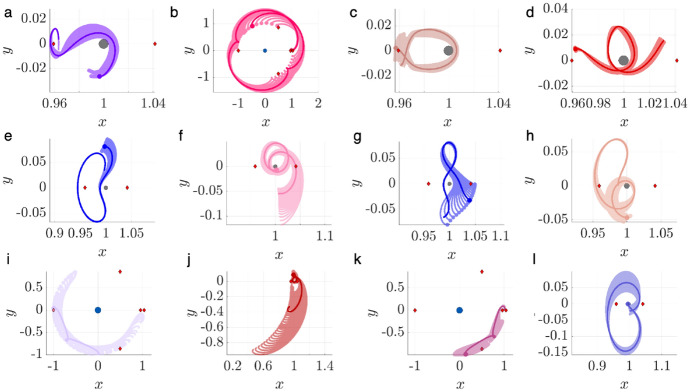 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3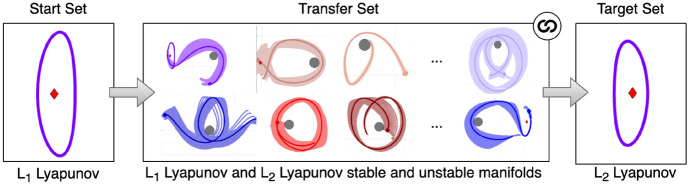 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6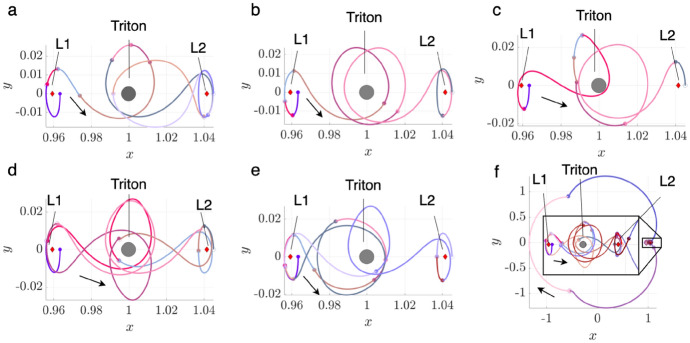 Figure 7
Figure 7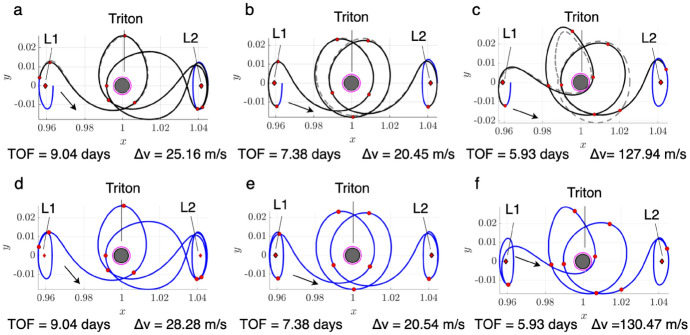 Figure 8
Figure 8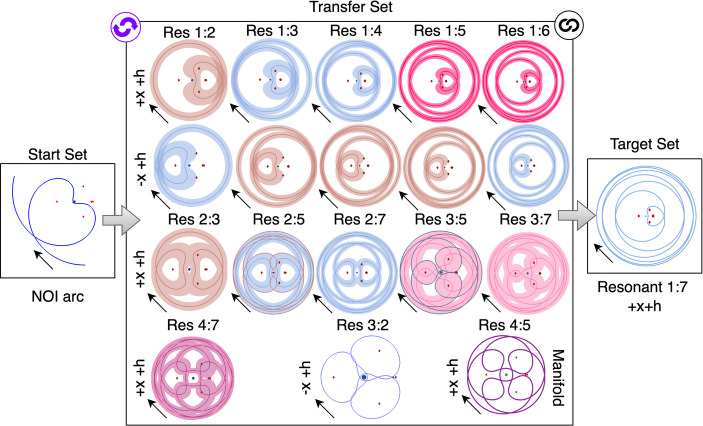 Figure 9
Figure 9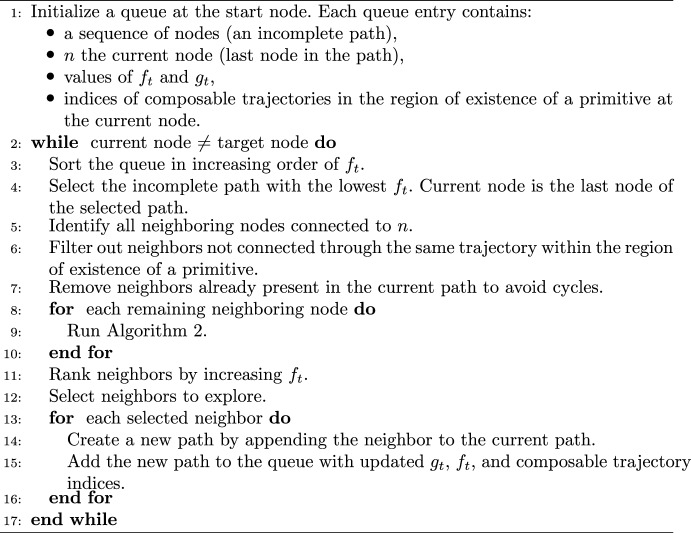 Figure 17
Figure 17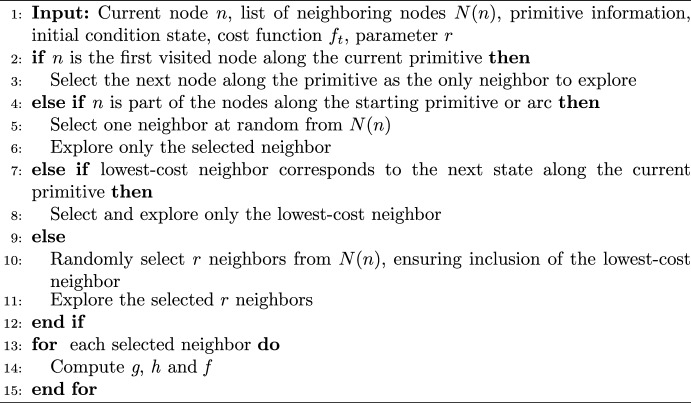 Figure 18
Figure 18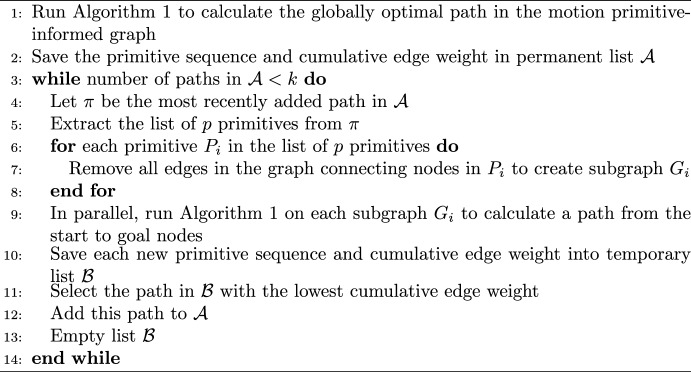 Figure 19
Figure 19Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsSpacecraft Dynamics and Control · Robotic Path Planning Algorithms · Astro and Planetary Science