A method to study and enhance the energy efficiency of soft electrostatic actuators
Steven L. Zhang, Toshihiko Fukushima, Sophie Kirkman, Soo Jin Adrian Koh, Philipp Rothemund, Christoph Keplinger

TL;DR
This paper introduces a new method to measure and improve the energy efficiency of soft electrostatic actuators used in robotics.
Contribution
A comprehensive framework is proposed for evaluating and optimizing the efficiency of soft electrostatic actuators.
Findings
Efficiency of Peano-HASEL actuators reached 63.6%, over three times previous reports.
The method was successfully applied to dielectric elastomer actuators, achieving up to 62.9% efficiency.
Efficiency depends on voltage, force, and actuation frequency.
Abstract
The electrical-to-mechanical energy conversion efficiency of actuators is a key metric, which determines the energy consumption of robotic devices. In the field of soft electrostatic actuators, there is currently no universally agreed-upon way to calculate and measure the efficiency of actuators. This article addresses this gap by introducing a comprehensive method to measure and optimize the efficiency of soft electrostatic actuators, thereby proposing a common framework for efficiency measurement that facilitates the development of highly efficient soft robotic systems. Actuators drive robotic motion, and their energy conversion efficiency is a key performance metric that informs power consumption. Soft electrostatic actuators promise new opportunities for bioinspired and wearable robotics, being driven by electrical signals and producing high-speed, muscle-like motion. Unlike…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
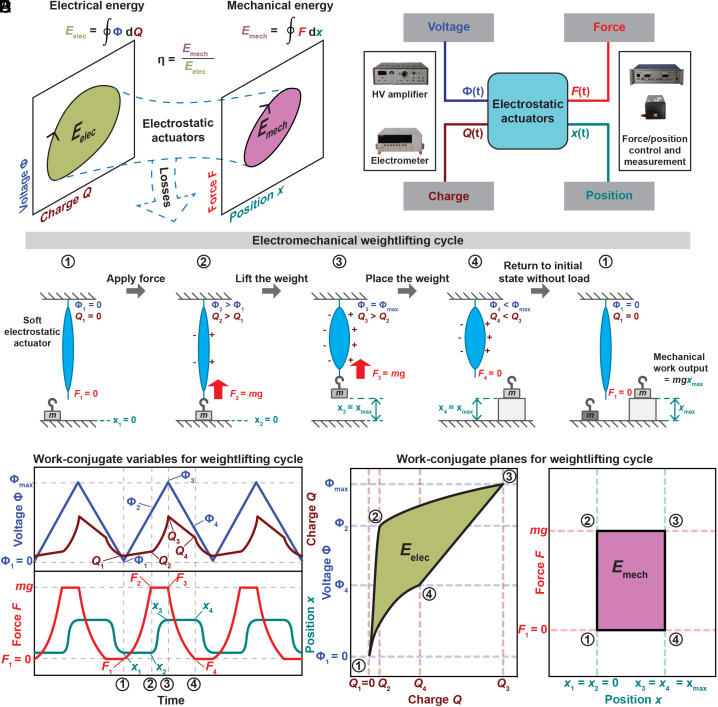 Figure 1
Figure 1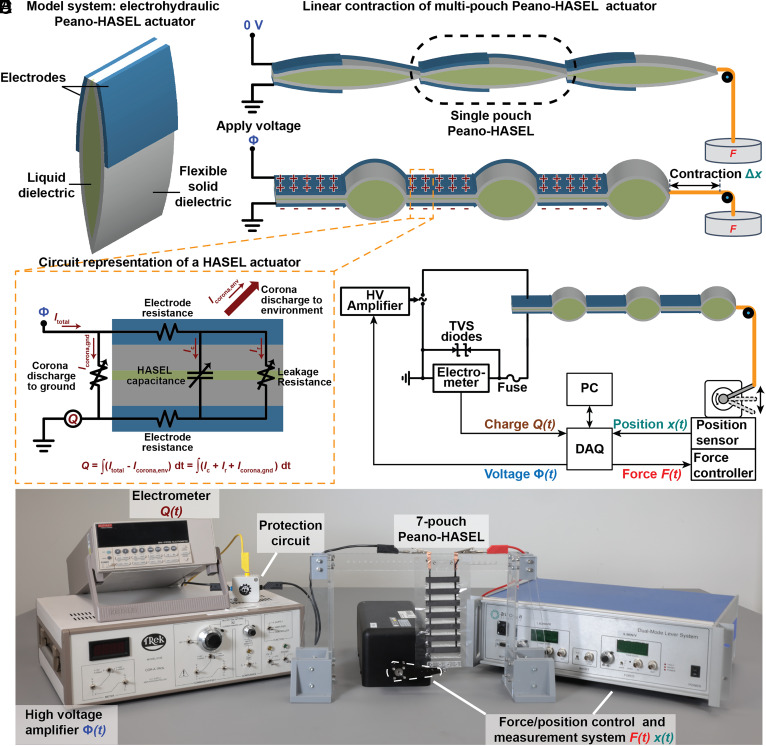 Figure 2
Figure 2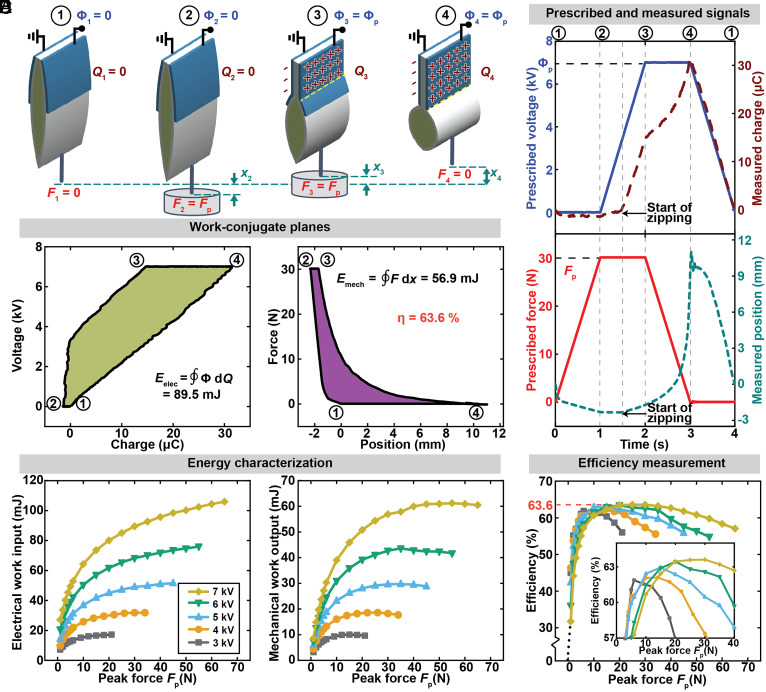 Figure 3
Figure 3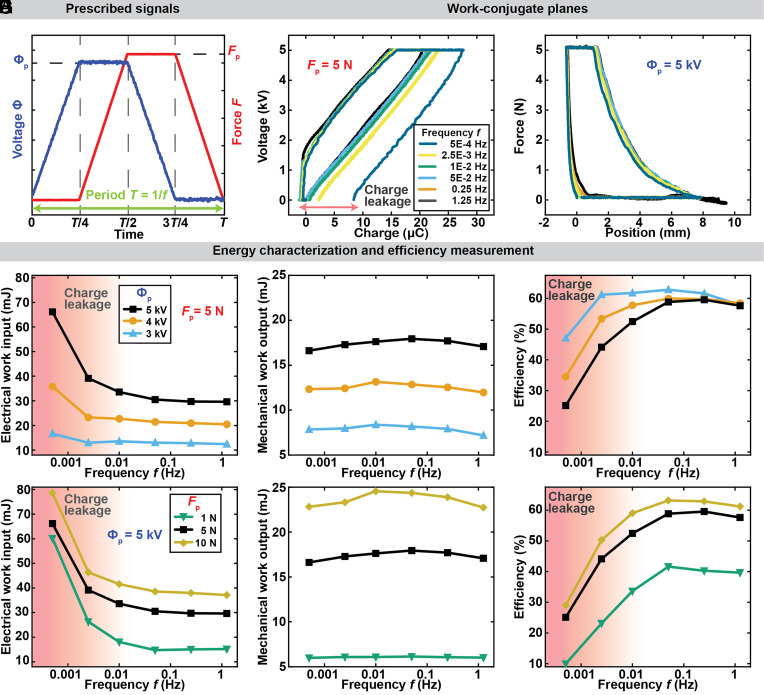 Figure 4
Figure 4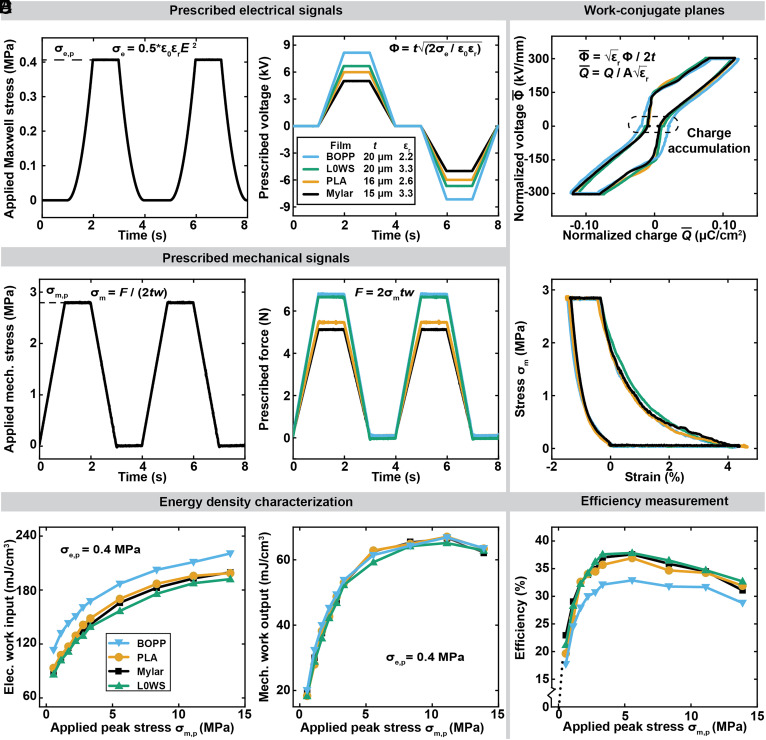 Figure 5
Figure 5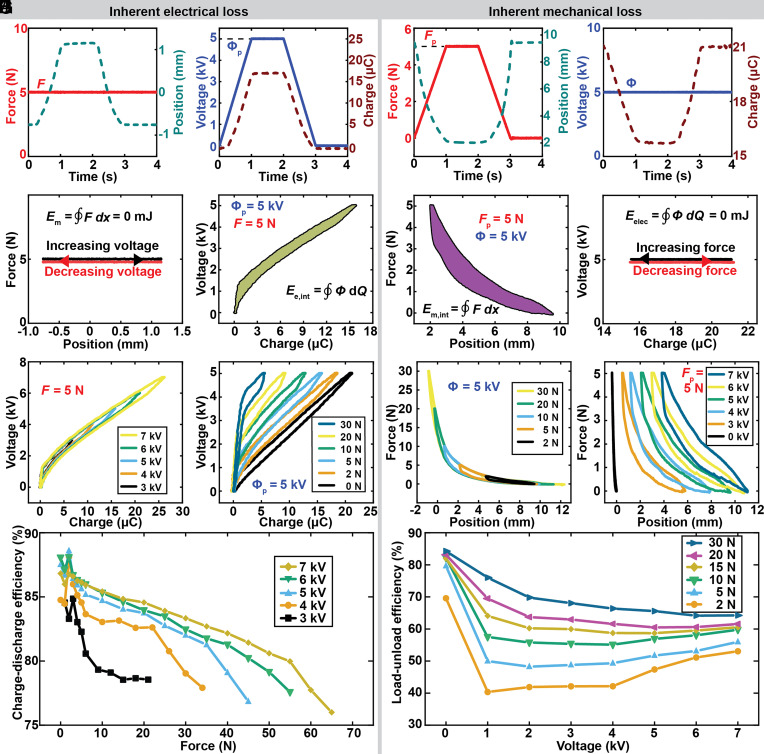 Figure 6
Figure 6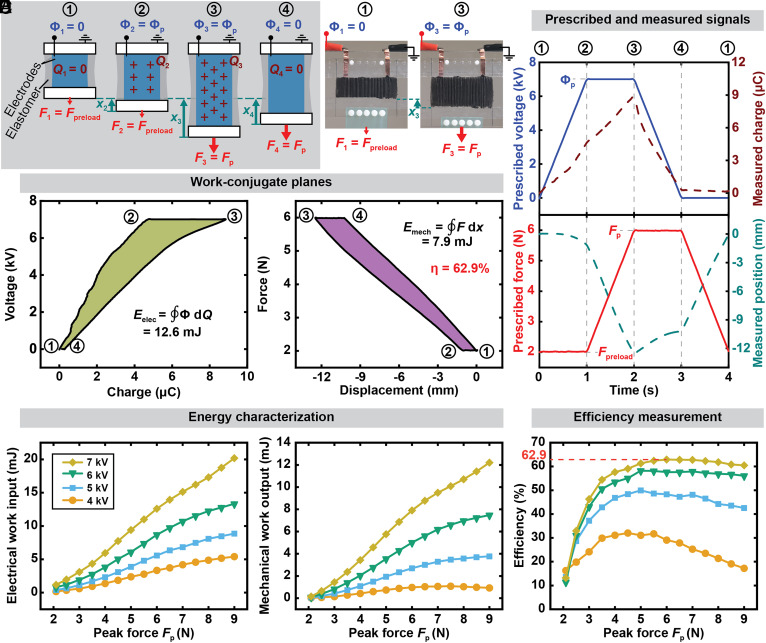 Figure 7
Figure 7Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsDielectric materials and actuators · Soft Robotics and Applications · Advanced Materials and Mechanics