Nonequilibrium Acceleration and Time Forecasting of Cluster-Mediated Self-Assembly
Roy Furman, Michael Faran, Gili Bisker

TL;DR
Nonequilibrium driving speeds up self-assembly processes and can be predicted using specific methods depending on the type of interactions involved.
Contribution
The study systematically evaluates nonequilibrium driving's effectiveness and predictability in self-assembly simulations using different models.
Findings
Nonequilibrium driving significantly reduces the time to first assembly across multiple models.
Predictability of assembly time depends strongly on the nature of particle interactions.
Directed interactions in VMMC systems enhance predictability compared to undirected dynamics.
Abstract
Nonequilibrium driving accelerates self-assembly by breaking the trade-off between thermodynamic stability and kinetic accessibility. While this principle has inspired a variety of theoretical and computational approaches, its effectiveness and predictability within physically realistic simulation frameworks remain to be systematically explored. Here, we investigate its impact using the Virtual-Move Monte Carlo (VMMC) method, a widely adopted approach for simulating collective particle dynamics during self-assembly. We investigate when such acceleration is both effective and predictable for three models, namely, VMMC with directed specific interactions, VMMC with undirected specific interactions, and an undirected single-particle Monte Carlo (SPMC), serving as a benchmark. Across all cases, nonequilibrium driving significantly reduces the time to first assembly, underscoring its…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
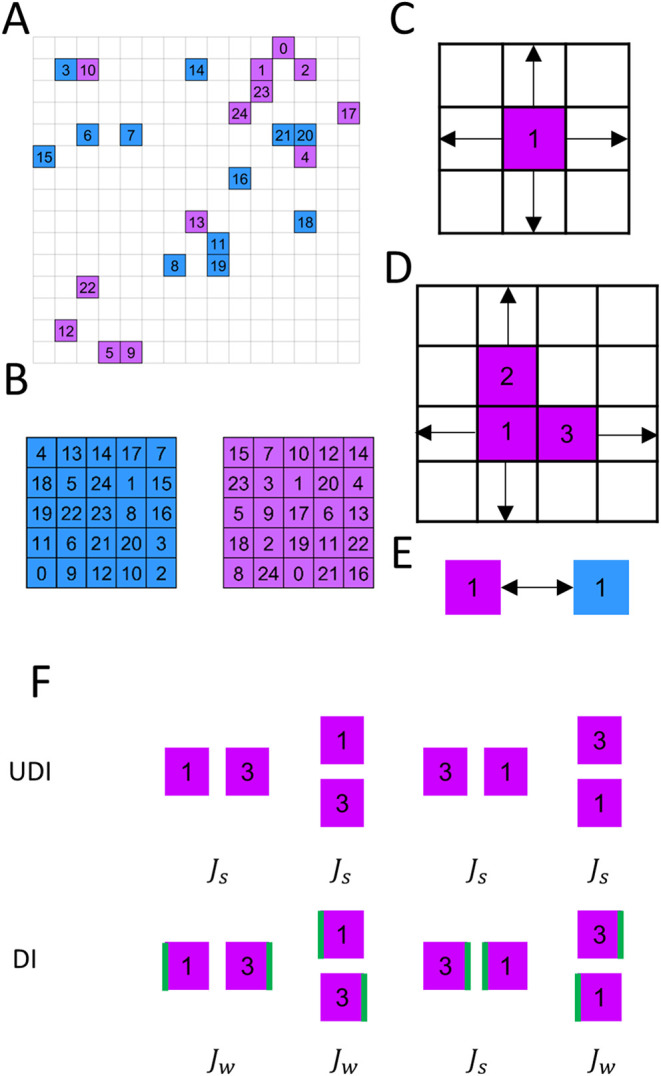 Figure 1
Figure 1 Figure 2
Figure 2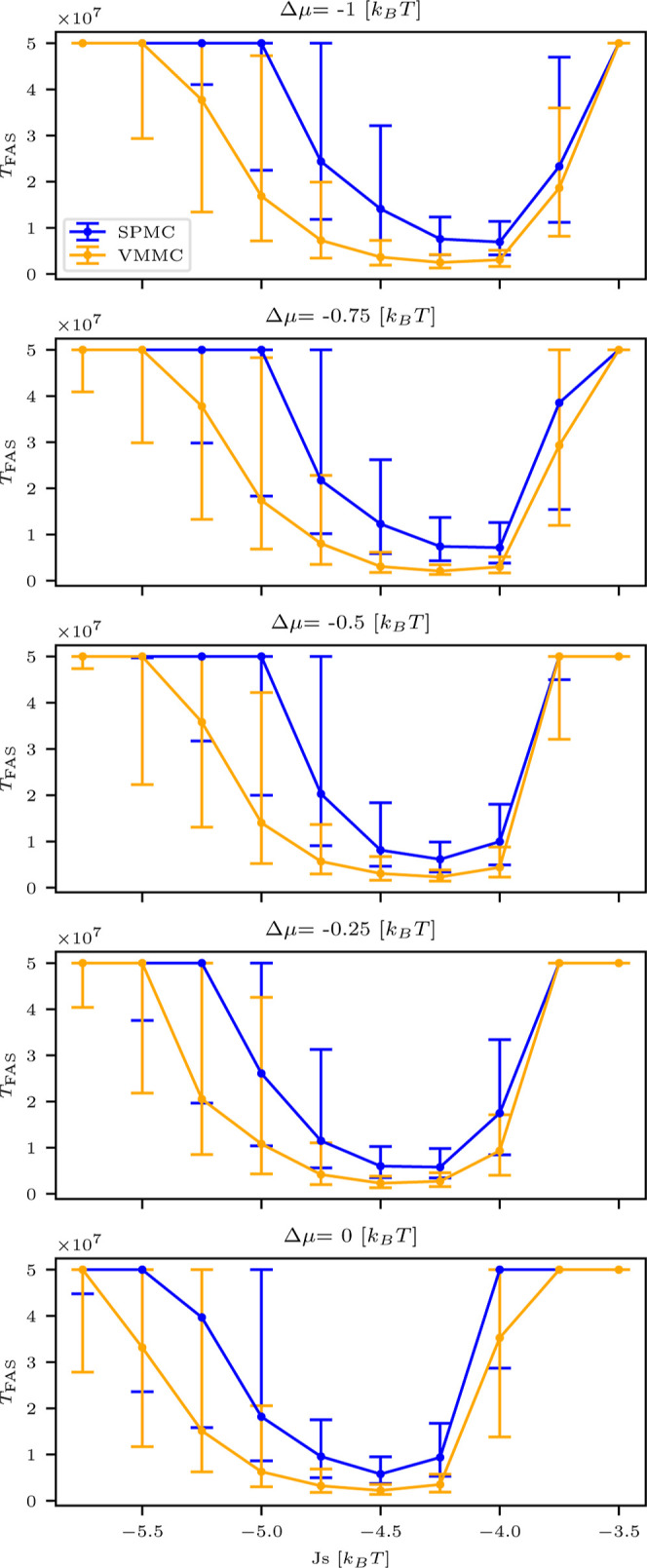 Figure 3
Figure 3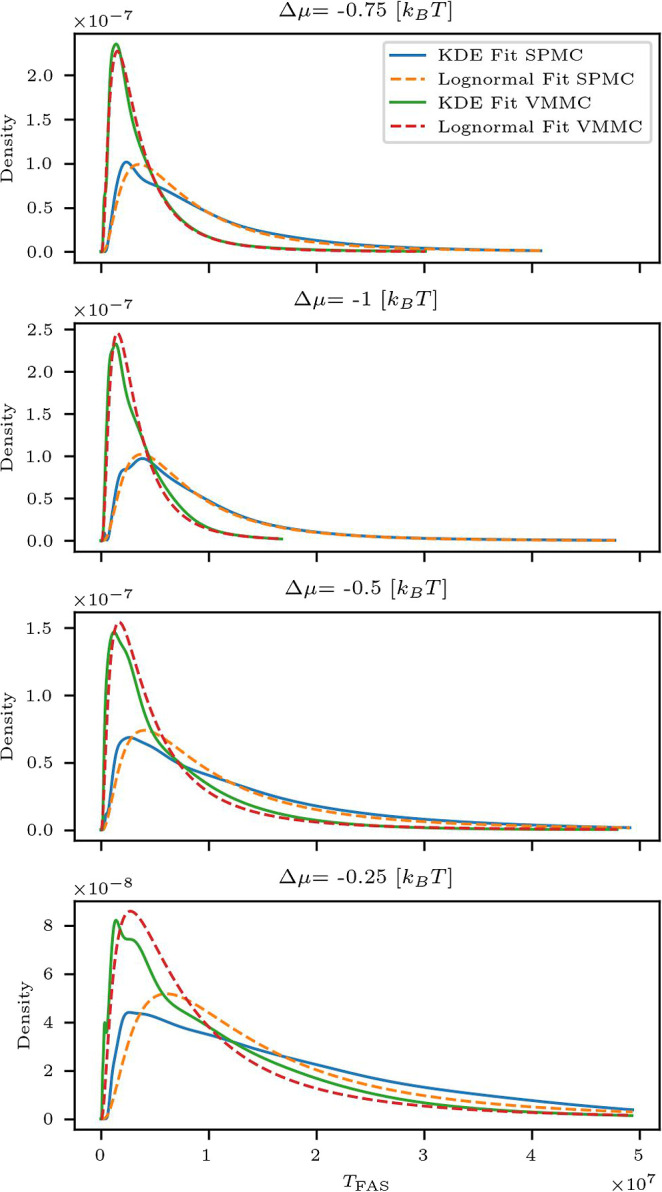 Figure 4
Figure 4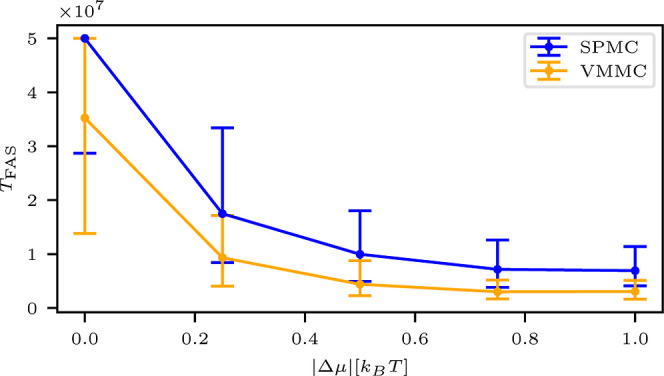 Figure 5
Figure 5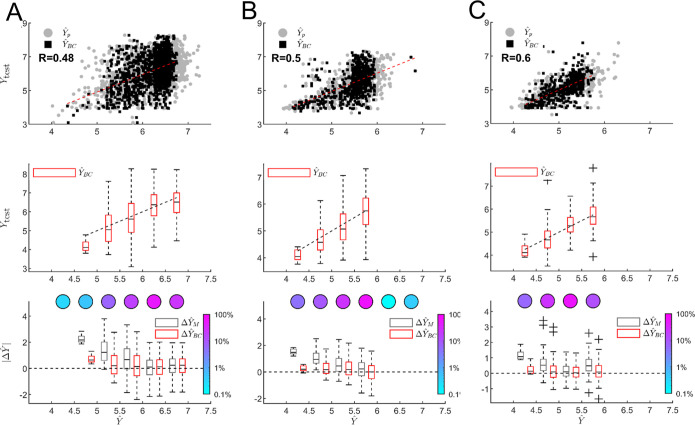 Figure 6
Figure 6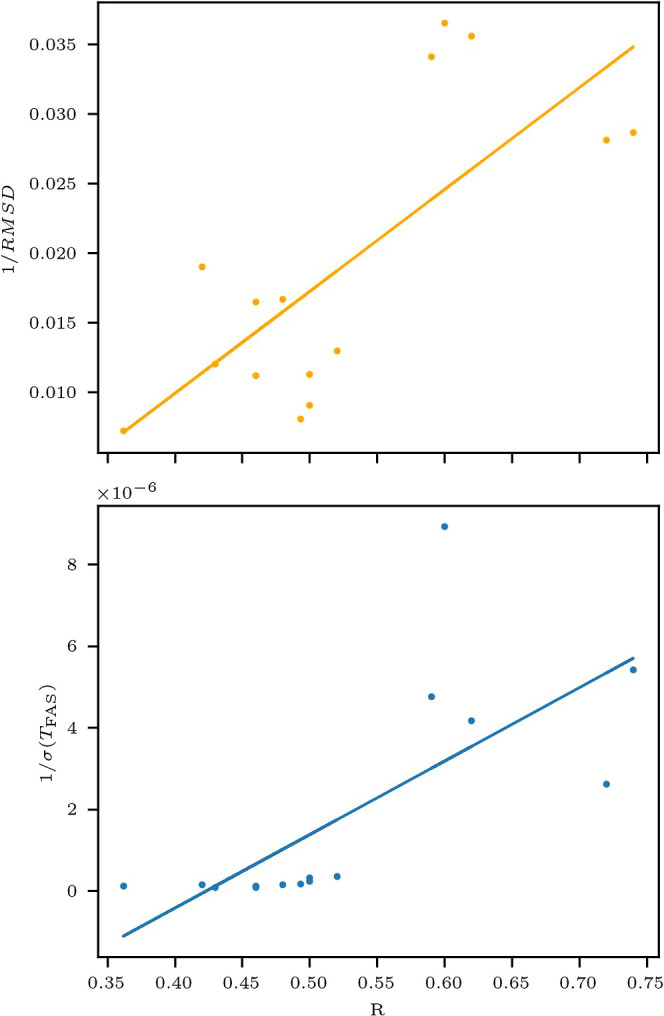 Figure 7
Figure 7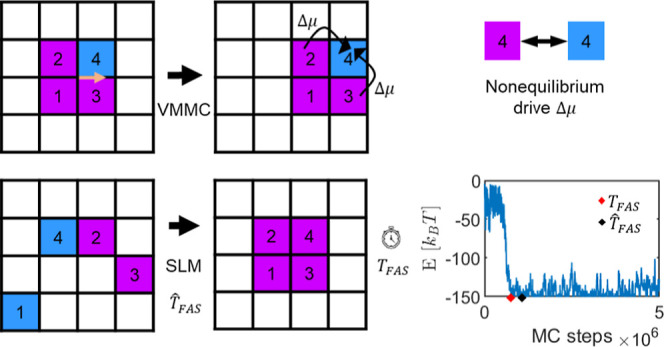 Figure 8
Figure 8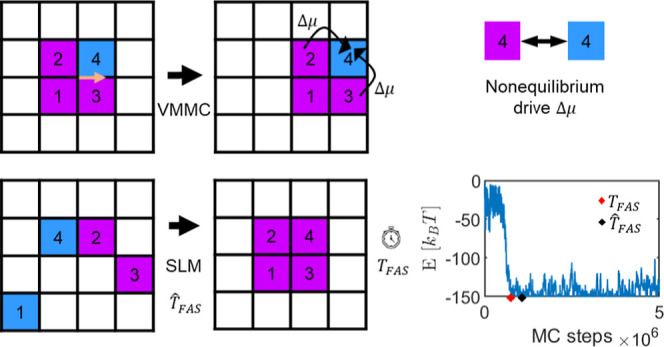 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13 Figure 14
Figure 14 Figure 15
Figure 15 Figure 16
Figure 16 Figure 17
Figure 17 Figure 18
Figure 18 Figure 19
Figure 19 Figure 20
Figure 20 Figure 21
Figure 21 Figure 22
Figure 22 Figure 23
Figure 23 Figure 24
Figure 24 Figure 25
Figure 25 Figure 26
Figure 26 Figure 27
Figure 27 Figure 28
Figure 28 Figure 29
Figure 29 Figure 30
Figure 30 Figure 31
Figure 31 Figure 32
Figure 32 Figure 33
Figure 33 Figure 34
Figure 34 Figure 35
Figure 35 Figure 36
Figure 36 Figure 37
Figure 37 Figure 38
Figure 38 Figure 39
Figure 39 Figure 40
Figure 40 Figure 41
Figure 41 Figure 42
Figure 42 Figure 43
Figure 43 Figure 44
Figure 44 Figure 45
Figure 45 Figure 46
Figure 46 Figure 47
Figure 47Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsMicro and Nano Robotics · Modular Robots and Swarm Intelligence · Pickering emulsions and particle stabilization