ATRON: Autonomous trash retrieval for oceanic neatness
John Abanes, Hyunjin Jang, Behruz Erkinov, Jana Awadalla, Anthony Tzes

TL;DR
This paper presents ATRON, an autonomous boat designed to collect floating trash in oceans using advanced sensors and path planning techniques.
Contribution
The novel contribution is an integrated system combining SLAM, computer vision, and motion planning for autonomous ocean trash collection.
Findings
ATRON successfully identified and collected floating debris in a controlled environment.
The system's path planning and obstacle avoidance capabilities were validated in an indoor pool.
PID tuning improved the boat's trajectory following performance.
Abstract
The subject of this article is the development of an unmanned surface vehicle (USV) for the removal of floating debris. A twin-hulled boat with four thrusters placed at the corners of the vessel is used for this purpose. The trash is collected in a storage space through a timing belt driven by an electric motor. The debris is accumulated in a funnel positioned at the front of the boat and subsequently raised through this belt into the garbage bin. The boat is equipped with a spherical camera, a long-range 2D LiDAR, and an inertial measurement unit (IMU) for simultaneous localization and mapping (SLAM). The floating debris is identified from rectified camera frames using YOLO, while the LiDAR and IMU concurrently provide the USV’s odometry. Visual methods are utilized to determine the location of debris and obstacles in the 3D environment. The optimal order in which the debris is…
Click any figure to enlarge with its caption.
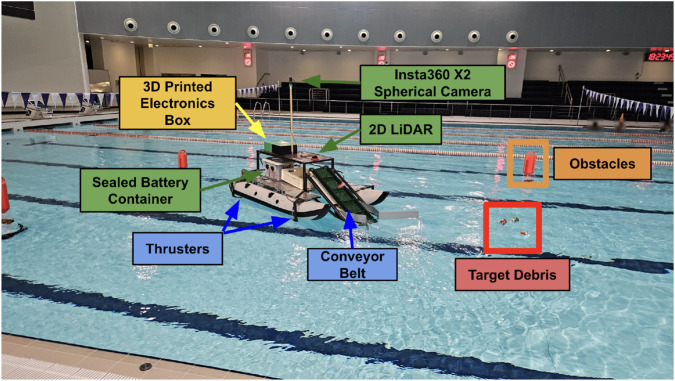 Figure 1
Figure 1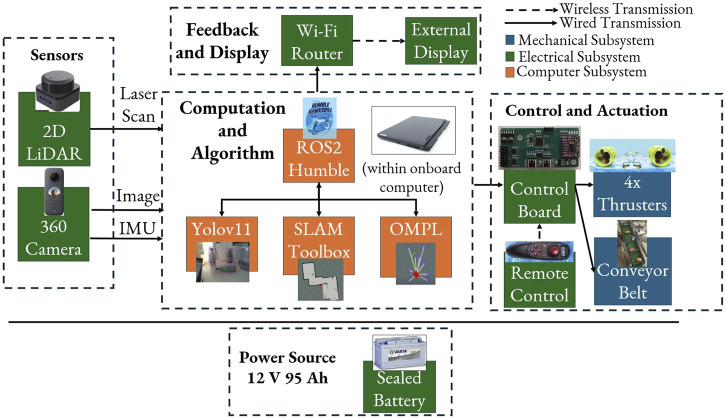 Figure 2
Figure 2 Figure 3
Figure 3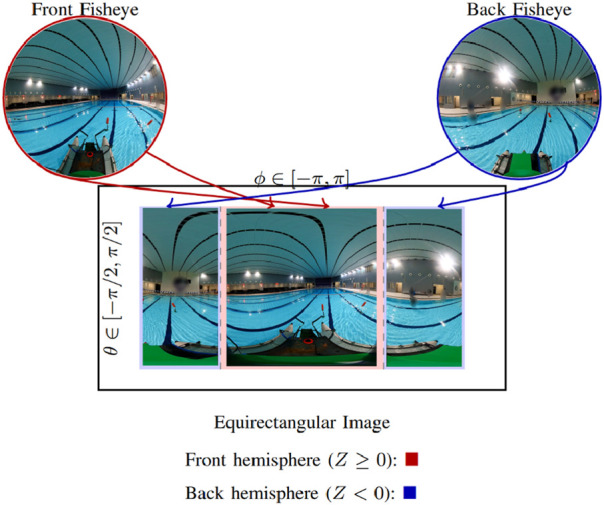 Figure 4
Figure 4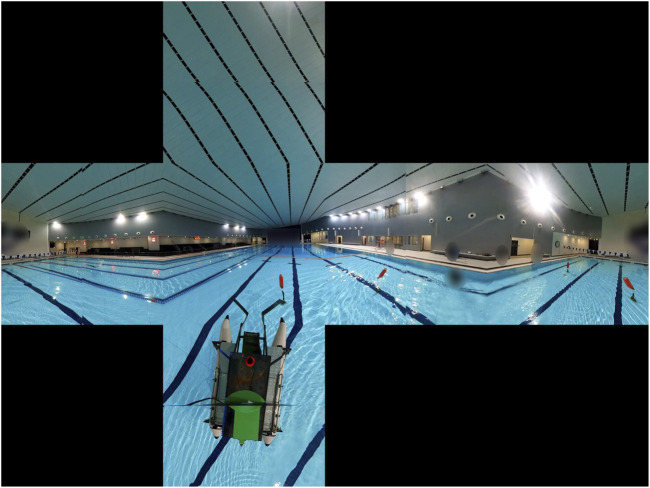 Figure 5
Figure 5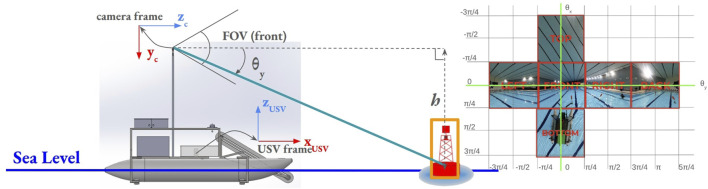 Figure 6
Figure 6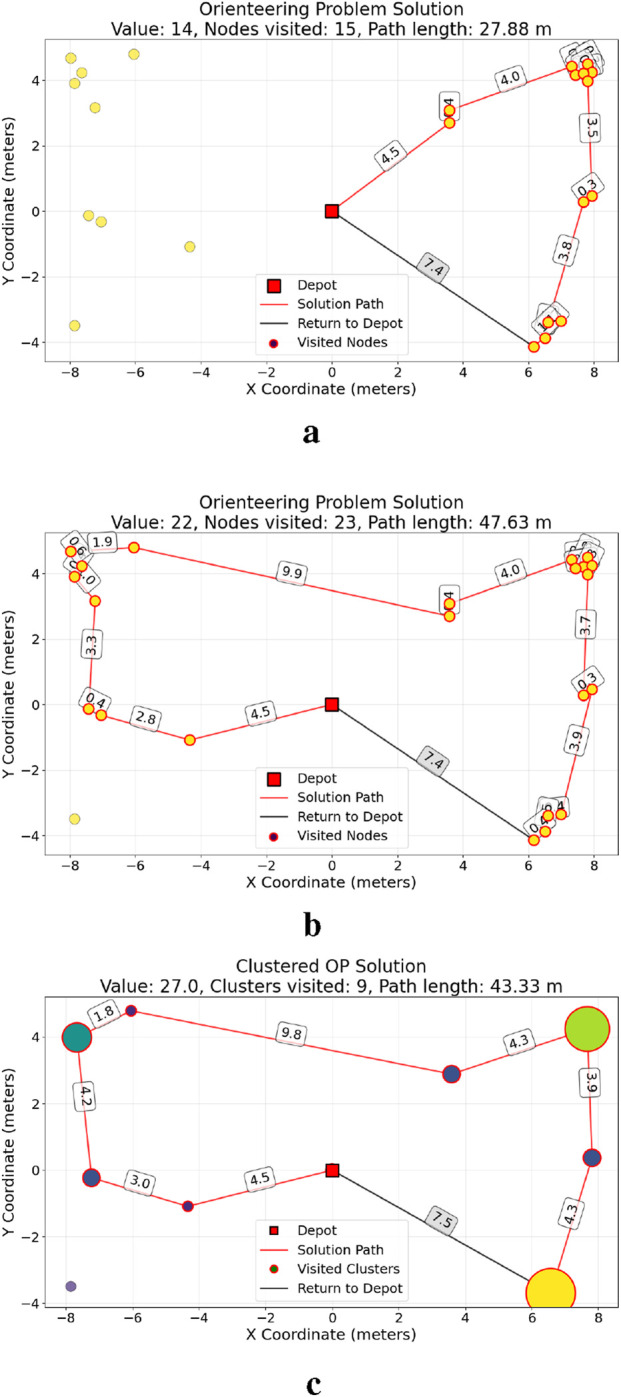 Figure 7
Figure 7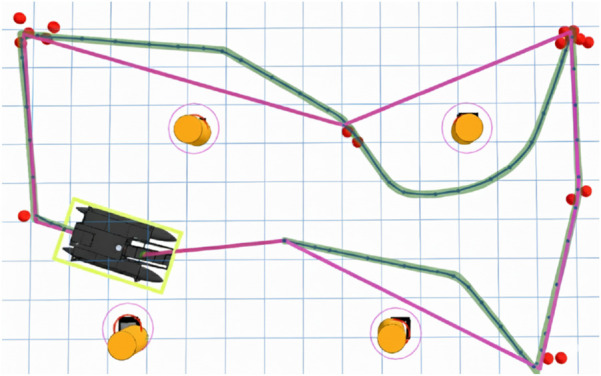 Figure 8
Figure 8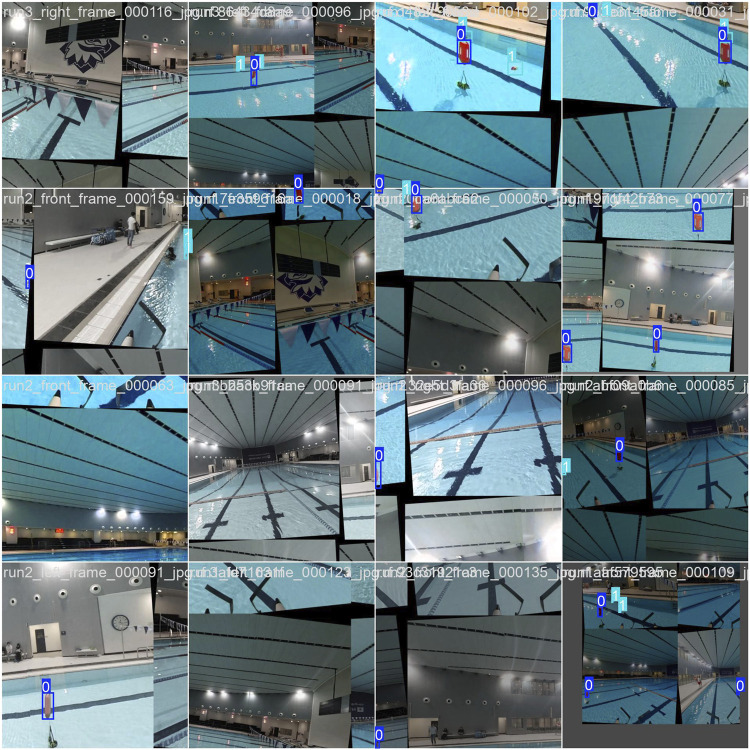 Figure 9
Figure 9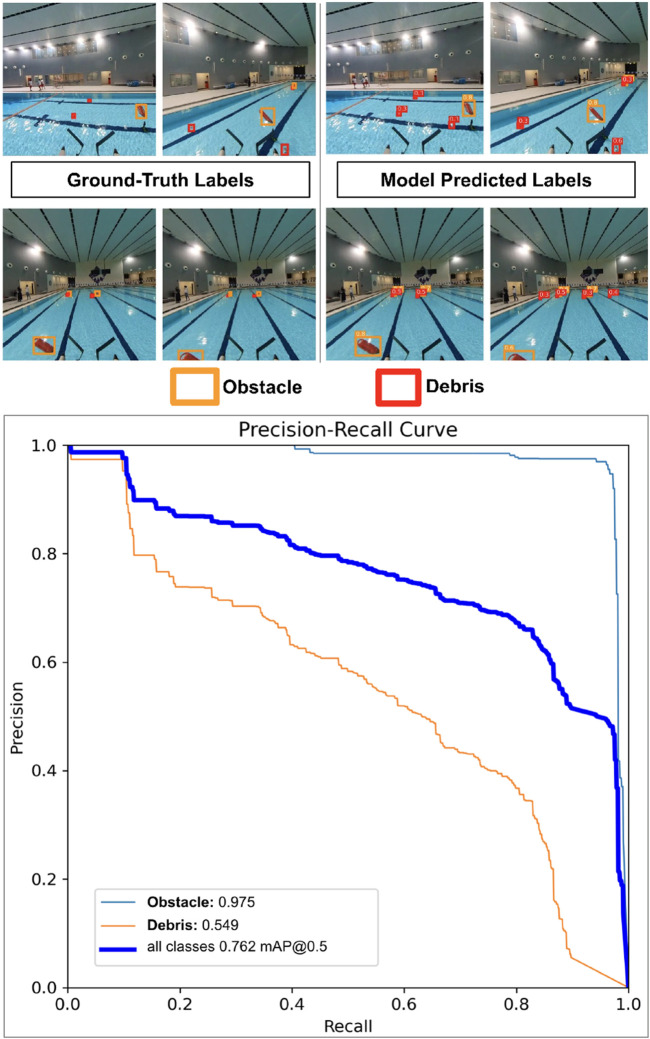 Figure 10
Figure 10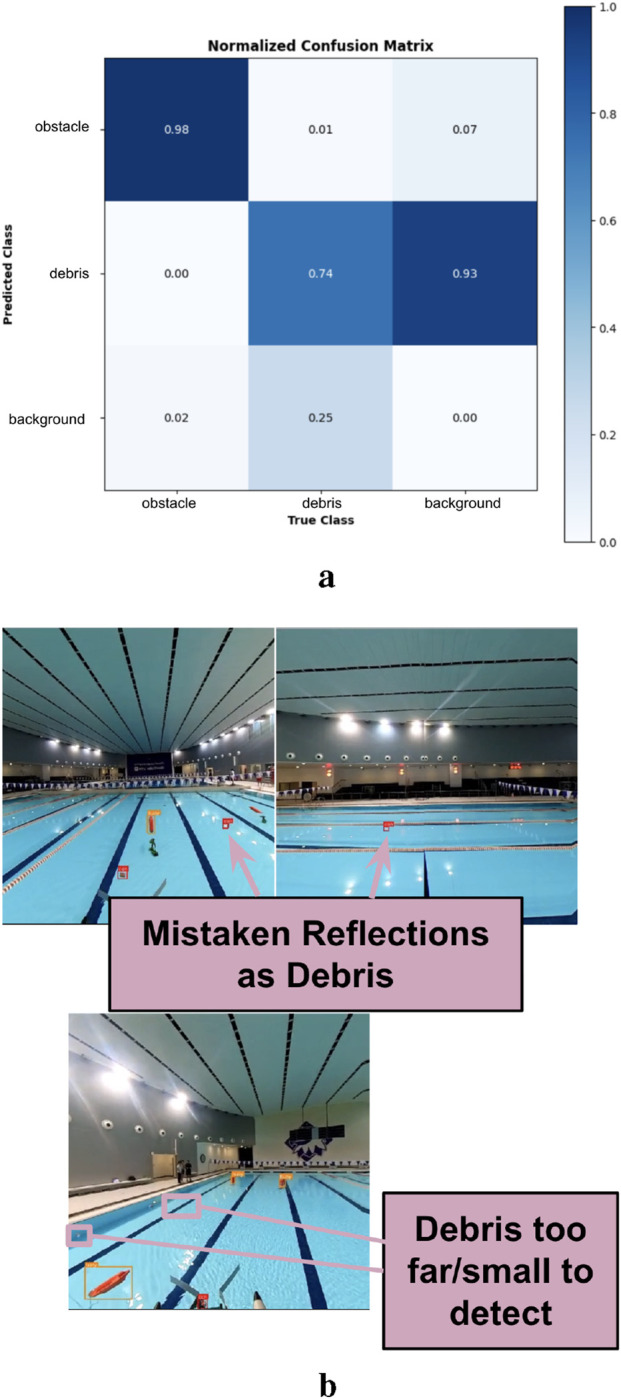 Figure 11
Figure 11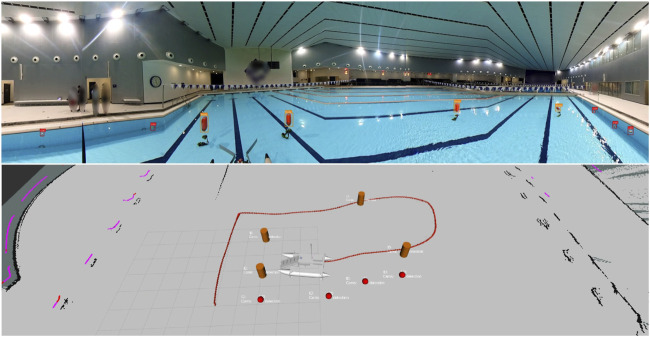 Figure 12
Figure 12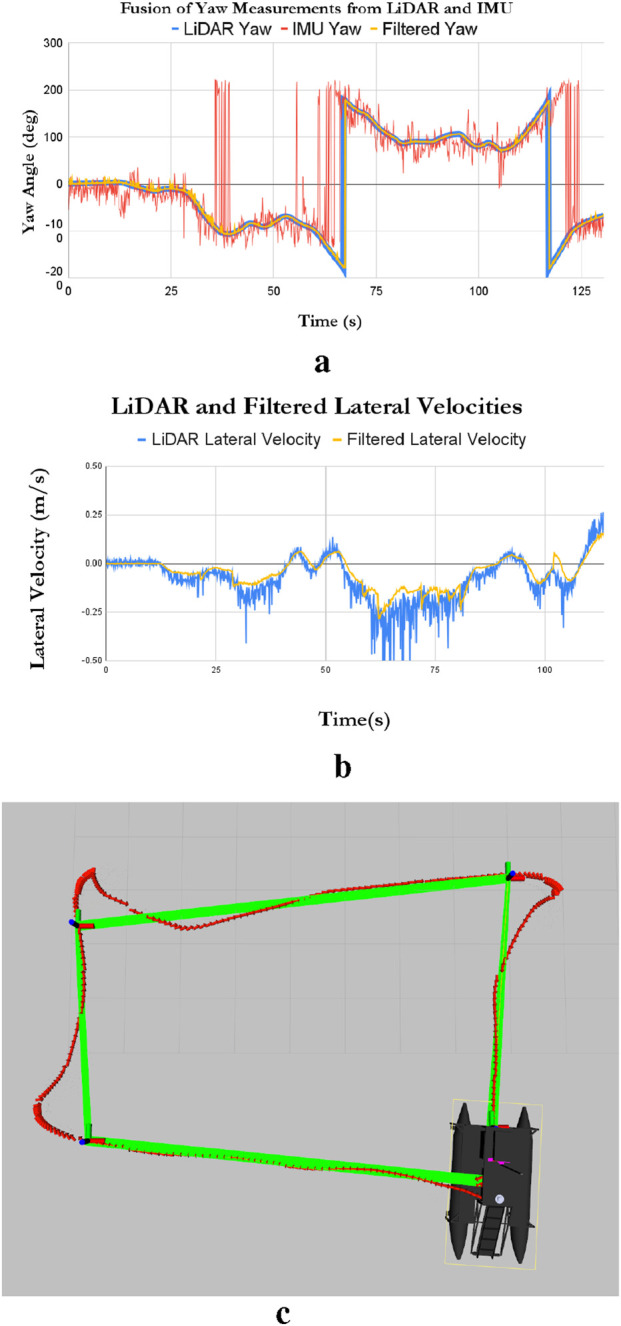 Figure 13
Figure 13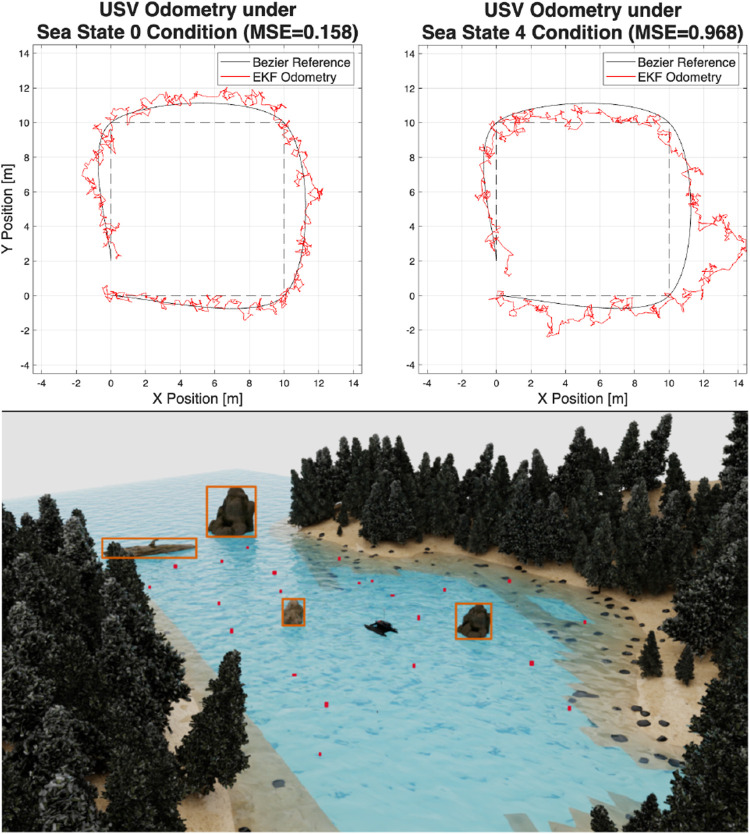 Figure 14
Figure 14Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsMaritime Navigation and Safety · Underwater Vehicles and Communication Systems · Robotic Path Planning Algorithms