On vibration suppression of a tendon-driven soft robotic neck for the social robot HARU
Seshagopalan Thorapalli Muralidharan, Randy Gomez, Georgios Andrikopoulos

TL;DR
This paper presents a new control strategy to reduce unwanted vibrations in a soft robotic neck used in a social robot, improving performance without adding extra hardware.
Contribution
A novel Coupled Axis Indirect Vibration Suppression (CIVS) mechanism is introduced for underactuated soft robotic systems.
Findings
CIVS reduces yaw angular range by approximately 53% and yaw acceleration area by over 60%.
CIVS outperforms sliding mode control in suppressing vibrations on the unactuated axis.
The method preserves smooth, expressive motion while enhancing damping.
Abstract
Tendon-driven continuum actuators (TDCAs) provide compliant and lifelike motion that is well suited for human–robot interaction, but their structural compliance and underactuation make them susceptible to undesired vibrations, particularly along unactuated axes under load. This work addresses vibration suppression in such systems by proposing a real-time control strategy for a two-degree-of-freedom TDCA-based soft robotic neck used in the HARU social robot, where yaw motion is unactuated and prone to oscillations due to eccentric loading. The proposed approach combines a current-based tendon pretensioning routine, baseline PID control of the actuated pitch and roll axes, and a novel Coupled Axis Indirect Vibration Suppression (CIVS) mechanism. CIVS exploits mechanical cross-axis coupling by using high-pass filtered yaw acceleration from an inertial sensor to generate transient tension…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
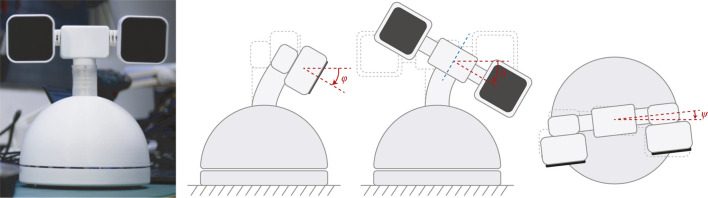 Figure 1
Figure 1 Figure 2
Figure 2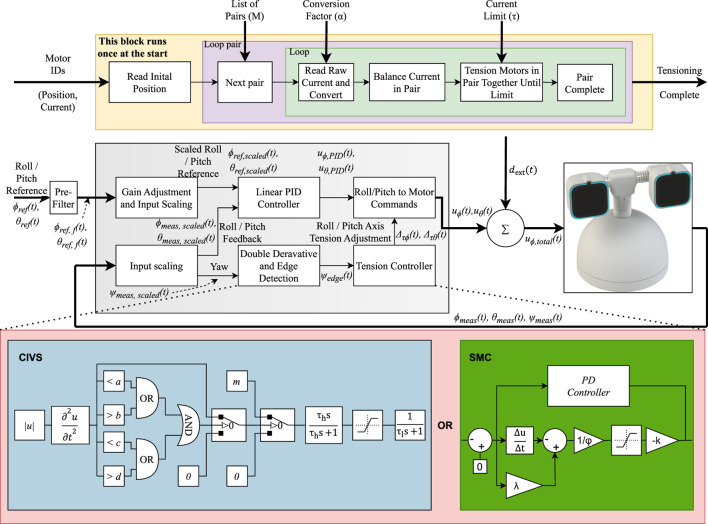 Figure 3
Figure 3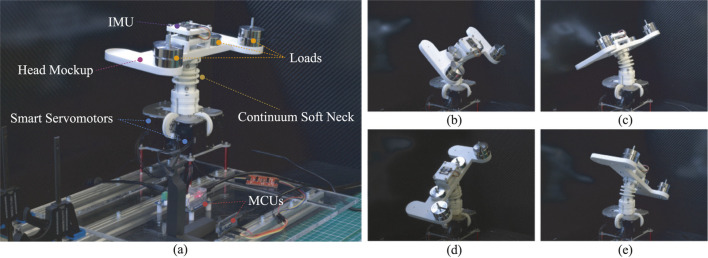 Figure 4
Figure 4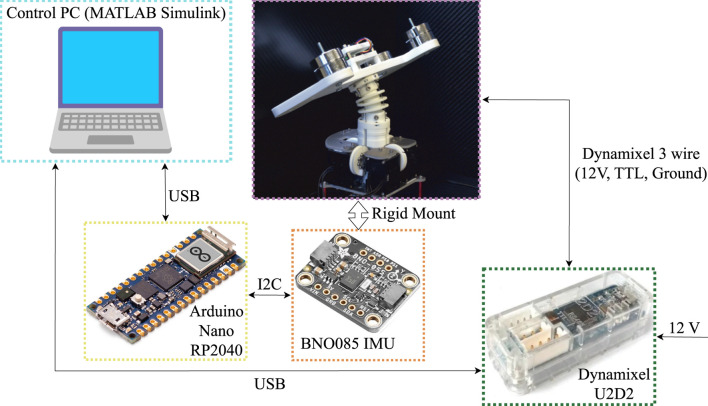 Figure 5
Figure 5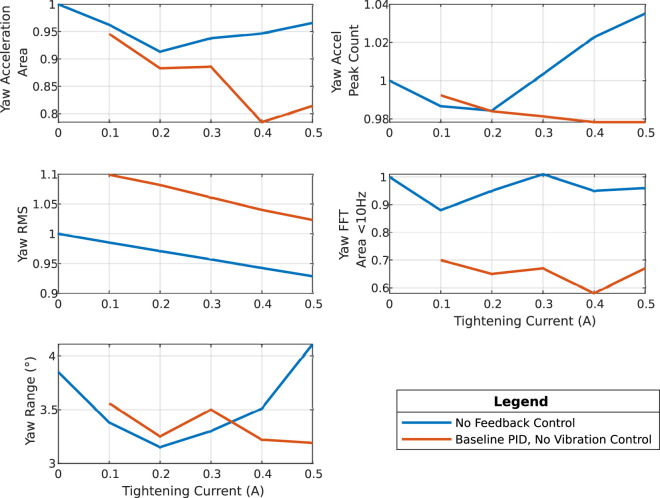 Figure 6
Figure 6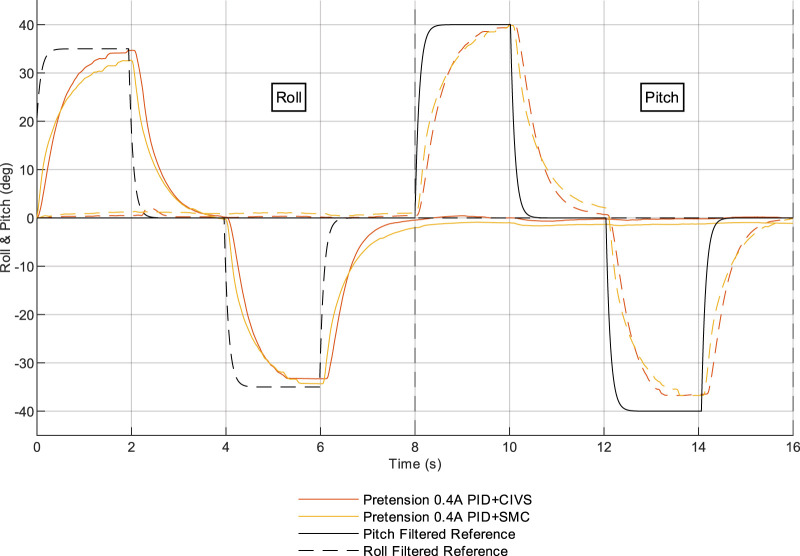 Figure 7
Figure 7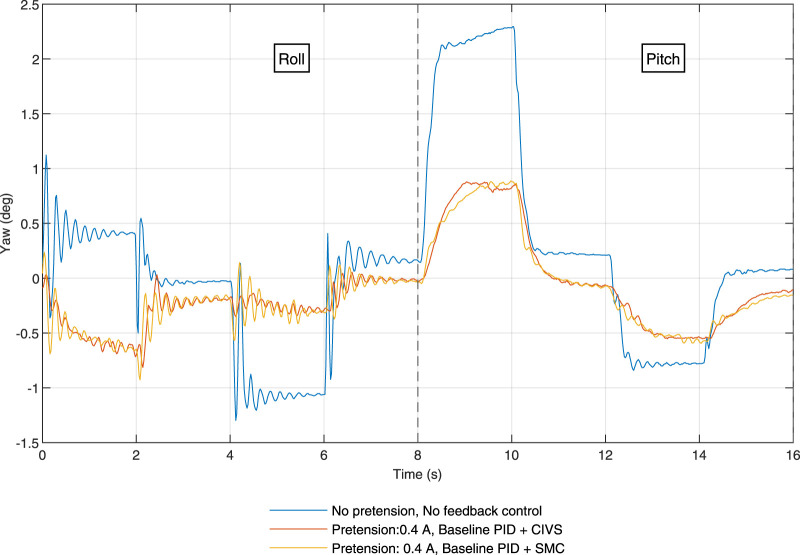 Figure 8
Figure 8Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsSoft Robotics and Applications · Prosthetics and Rehabilitation Robotics · Hydraulic and Pneumatic Systems