Continuous volitional control of a bionic leg supports diverse walking patterns in both agonist–antagonist muscle interface and bone-anchored prosthesis users
Federica Damonte, Lucas Avanci Gaudio, Jose Gonzalez-Vargas, Guillaume Durandau, Jennifer Ernst, Johan S Rietman, Ruud Leijendekkers, Herman van der Kooij, Massimo Sartori

TL;DR
A new control system for bionic legs allows users with different types of prostheses to walk more naturally by adjusting movement based on muscle signals.
Contribution
A neuromechanical model-based HMI enables volitional control of bionic legs for AMI and BAP users across diverse walking conditions.
Findings
Participants achieved 87% accuracy in modulating prosthesis torque timing within target ranges.
The HMI enabled control of walking speed and incline through muscle activation patterns.
The system works for both AMI and BAP users, suggesting generalizability across amputation types.
Abstract
Myoelectric control paradigms have the potential to enable continuous volitional control of bionic limbs in various movement conditions. Although individuals with below knee amputations and an agonist–antagonist muscle interface (AMI) were proven to display a greater degree of continuous volitional control in bionic ankle-foot systems with respect to conventional socket-suspended prosthetic users, it remains unclear how myoelectric interfaces could translate to non-AMI prosthetic users with bone-anchored prostheses (BAP). This preliminary study proposes a human–machine interface (HMI) based on a neuromechanical model to enable volitional, continuous myoelectric control of a bionic leg in AMI and BAP users, walking across various speeds and ground inclinations. Differently from state of the art solutions, the proposed HMI is based on a digital twin of the intact leg, synthesizing the…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
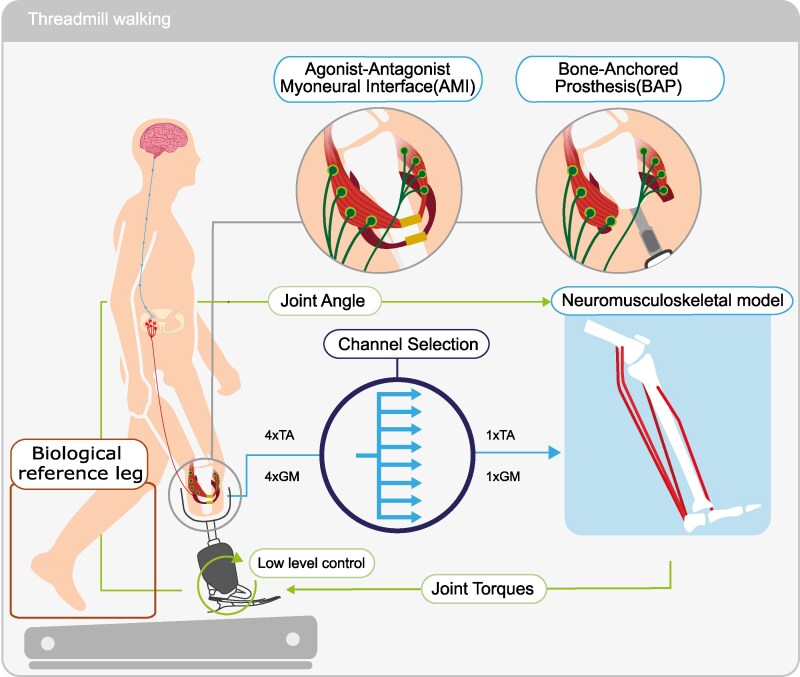 Figure 1
Figure 1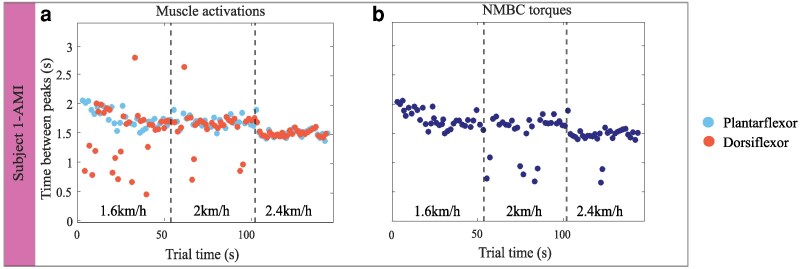 Figure 2
Figure 2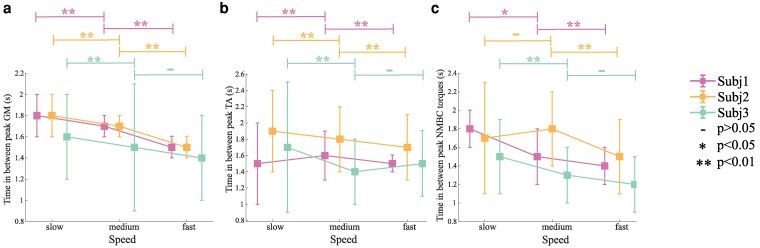 Figure 3
Figure 3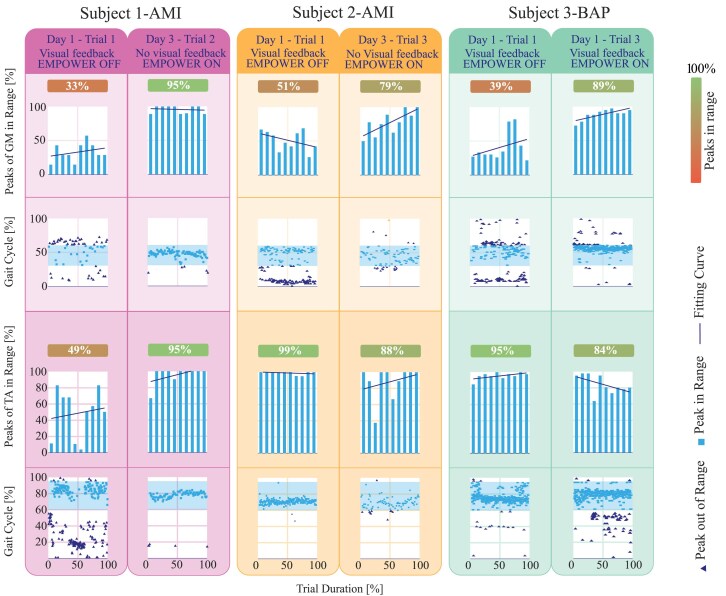 Figure 4
Figure 4Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsMuscle activation and electromyography studies · Prosthetics and Rehabilitation Robotics · Advanced Sensor and Energy Harvesting Materials