Micro Fault Diagnosis of Driving Motor Bearings Based on Multi-Residual Neural Networks and Evidence Reasoning Rule
Aoxiang Zhang, Lihong Tang, Guanyu Hu

TL;DR
This paper introduces a new model for detecting small faults in vehicle motor bearings using neural networks and reasoning rules to improve accuracy and reliability.
Contribution
The novel contribution is the integration of multi-residual neural networks with an evidence reasoning rule for improved micro-fault diagnosis.
Findings
The proposed model achieves higher diagnostic accuracy for micro-faults under variable conditions.
The model integrates a credibility assessment mechanism to enhance result reliability.
Abstract
Micro-fault diagnosis of vehicle driving motor bearings can significantly bring safety and economic benefits in preventing major accidents and extending equipment lifespan. However, under variable operating conditions, effectively capturing and diagnosing fault-related weak current fluctuation or high-frequency noise features, presents substantial technical challenges. Regarding these issues, this paper proposes multi-residual neural networks (multi-ResNets) and an evidential reasoning rule (ER Rule)-based fault diagnosis model. The model employs a benchmark condition generalization mechanism, which selects multiple typical load conditions as diagnostic anchor points based on a multi-residual neural network structure. Furthermore, by integrating a sub-model credibility assessment mechanism to perform diagnostic condition assessment and category assessment based on ER rule. The…
Click any figure to enlarge with its caption.
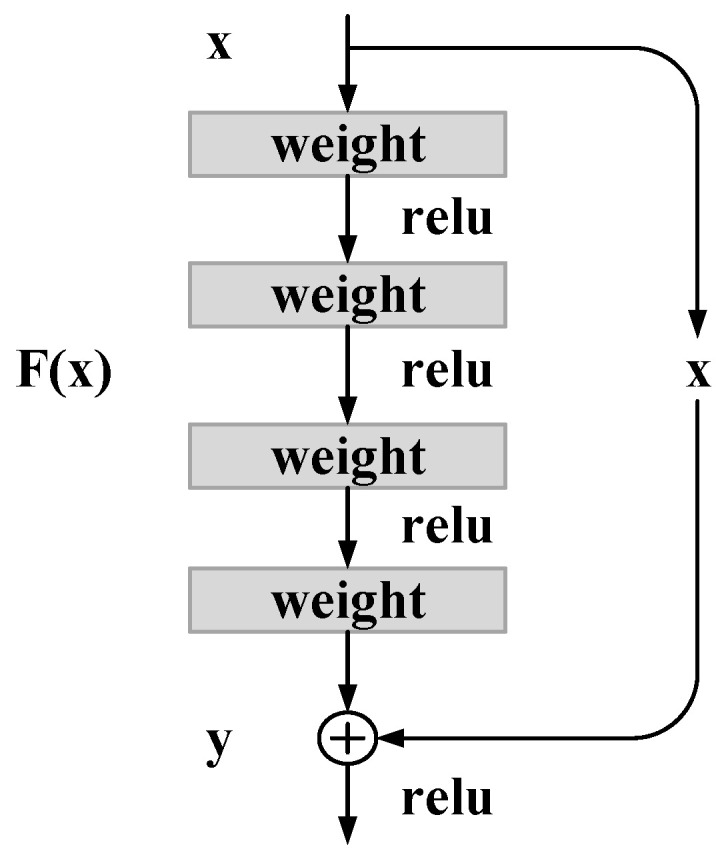 Figure 1
Figure 1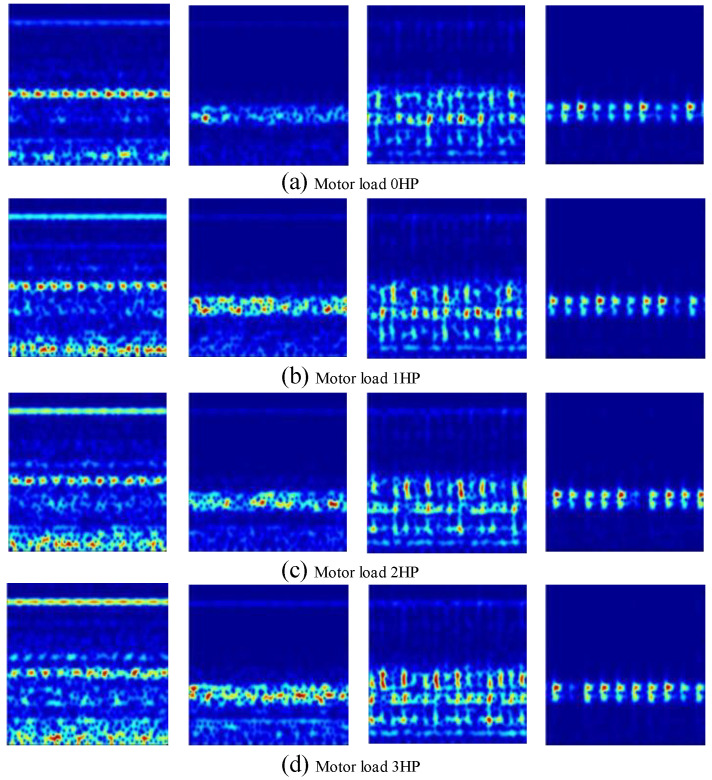 Figure 2
Figure 2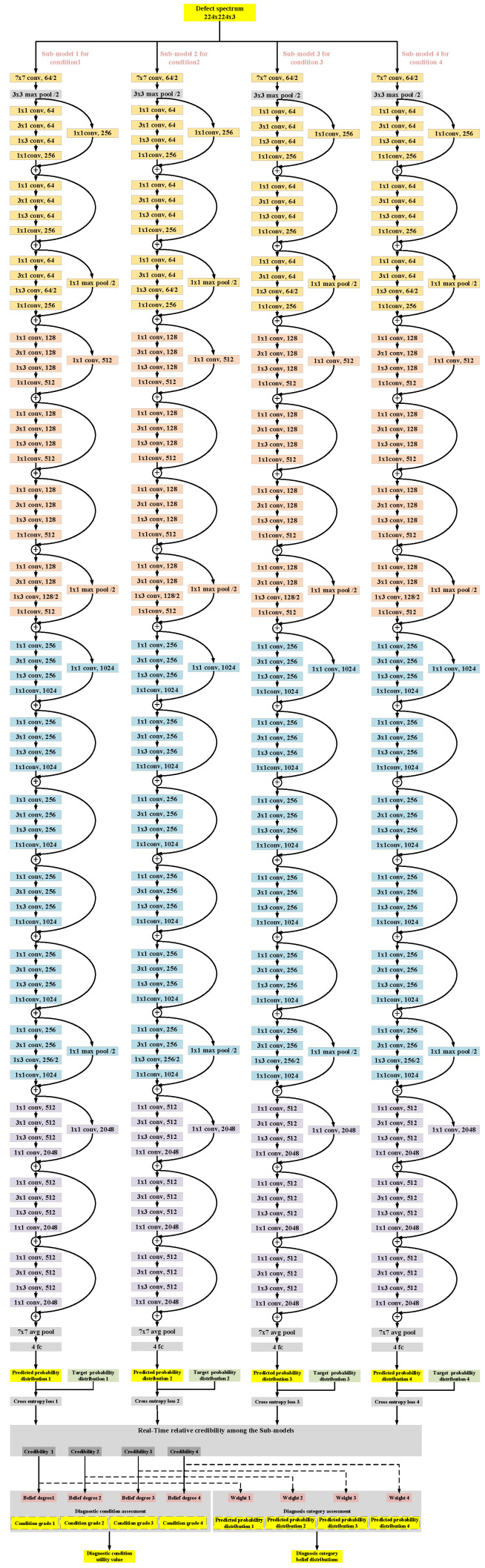 Figure 3
Figure 3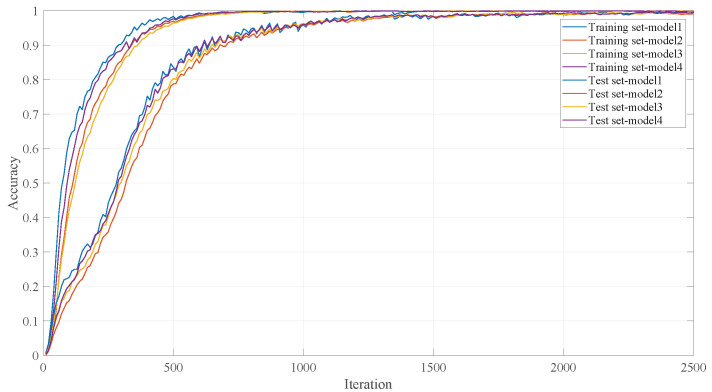 Figure 4
Figure 4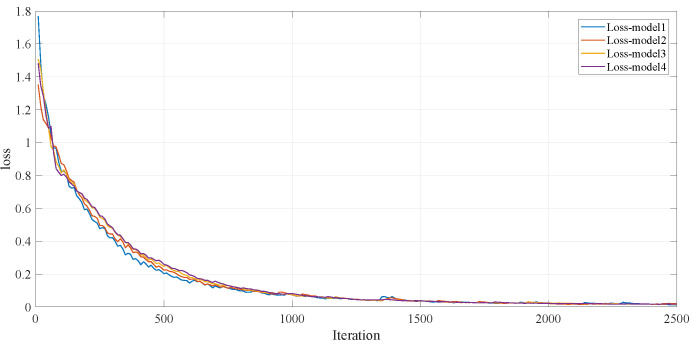 Figure 5
Figure 5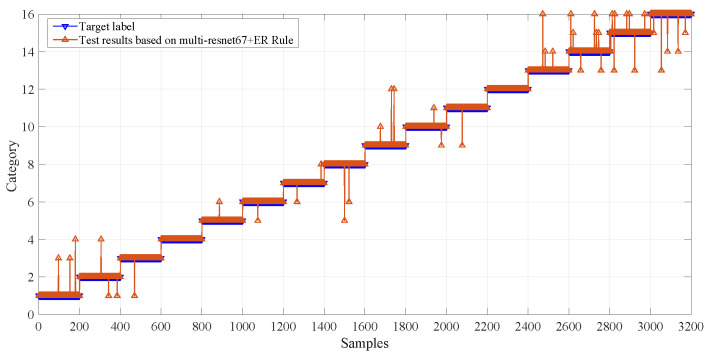 Figure 6
Figure 6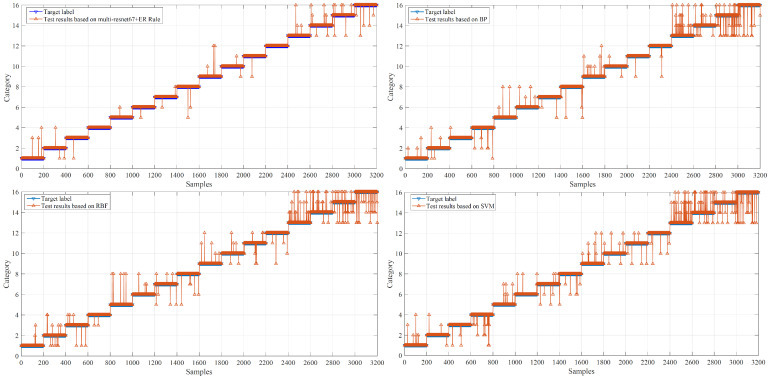 Figure 7
Figure 7- —National Natural Science Foundation of China
- —Central Guiding Local Science and Technology Development fund project
Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsMachine Fault Diagnosis Techniques · Machine Learning and ELM · Fault Detection and Control Systems
1. Introduction
MICRO-faults as a typical fault type in vehicle driving motor bearings, due to their strong concealment and rapid development, if not addressed in time, micro-faults can trigger a chain reaction of bearing failure, leading to major safety incidents such as motor burnout or vehicle loss of control. When early detected and diagnosed, it can not only eliminate risks at the bud, enhancing vehicle operational safety, but also promotes the traditional “periodic maintenance” model to upgrade to an intelligent “condition monitoring + predictive maintenance” model. This optimizes bearing maintenance cycles, reduces resource waste caused by over-maintenance, and lowers overall vehicle operating costs.
However, due to the concealment and randomness of minor faults, their characteristics are often very difficult to detect. Moreover, fault signatures are more prone to being masked by interference or noise caused by vehicle operating conditions and load changes, making early monitoring and fault localization particularly challenging.
These issues impose higher demands on diagnostic technologies in terms of feature extraction, diagnostic accuracy, and reliability. Micro-fault diagnosis is not only one of the core challenges in the current field of fault diagnosis, but also an urgent problem that needs to be solved.
By organizing and analyzing current investigations, the research on micro-fault diagnosis mainly includes the following three types.
Knowledge-based approach: The diagnostic method based on qualitative knowledge is suitable for fields with complex system structures and extensive historical fault data, offering strong explainability and reasoning capabilities.
For the fault diagnosis and monitoring of gas turbine combustion chamber, ref. [1] presents the fundamental working principles, conceptual design framework, and development methodology of a gas turbine combustion chamber expert system. In addressing energy system fault diagnosis challenges, ref. [2] proposes an innovative approach that integrates evolutionary algorithm recombination with artificial random selection operator generation to construct the rule-based knowledge base of expert systems. For process industry safety protection applications, ref. [3] develops a knowledge-based fault diagnosis methodology that employs fuzzy logic to synergistically process expert domain knowledge and real-time operational data, culminating in the creation of a computer-aided diagnostic tool. In the domain of automotive fault detection, ref. [4] introduces an expert system (ES)-based framework for electric vehicle fault modeling, implementing the resulting Car Fault Diagnosis Auxiliary System (CFMDAS). To overcome inherent limitations of conventional expert systems regarding generality and expandability, ref. [5] proposes a task-oriented software architecture that enables context-specific optimization through a configurable rule set while maintaining user accessibility for rule modification via human-machine interfaces, thereby facilitating continuous professional knowledge acquisition. Finally, ref. [6] establishes a comprehensive fault diagnosis expert system framework characterized by two core components: a hierarchical diagnostic strategy and a knowledge base incorporating fault classification and unit-under-test detection methodologies. Ref. [7] proposes an automatic interval belief rule base (A-IBRB) method to address expert knowledge acquisition challenges. The model integrates error-constrained k-means++, Gaussian interval belief initialization, and evidential reasoning, optimized by a projected CMA-ES algorithm. Gearbox and bearing fault diagnosis cases validate its effectiveness and reliability.
However, under variable operating conditions, the difficulty in extracting specific micro-fault features and expressing knowledge-based rules limits their diagnostic applicability in such scenarios.
Analytical model-based approach: The analytical diagnosis model is built upon a deep understanding of system fault evolution mechanisms, involving high-precision mathematical modeling of the system. It offers advantages such as high real-time performance and robustness in diagnosis.
In ref. [8], a hierarchical multi-model fault diagnosis scheme utilizing the Unscented Kalman Filter (UKF) is proposed for precise detection and isolation of actuator faults in robotic systems. Building upon this, ref. [9] extends the Observer-based Localization Algorithm (OLA) from continuous systems to nonlinear discrete systems, providing comprehensive stability analysis and robustness evaluation of both fault detection and compensation algorithms. Specifically addressing four-rotor actuator faults, ref. [10] designs an integrated fault diagnosis system incorporating a nonlinear fault detection estimator and a nonlinear adaptive fault isolation estimator, demonstrating significant improvements in system robustness and algorithm sensitivity. Furthermore, ref. [11] develops a robust navigation-based fault diagnosis system for underwater robotic platforms through particle filtering techniques, achieving effective fault identification while maintaining superior operational robustness.
For the diagnosis of micro-fault under variable operating conditions, a profound understanding of fault evolution mechanisms and precise mathematical modeling prove highly challenging. Moreover, the subtle nature of micro-faults makes them easily buried in noise, necessitating models with exceptional robustness and fault sensitivity.
Data-driven approach: Traditional data-driven fault diagnosis algorithms directly establish input-output mapping relationships by leveraging noise reduction and feature extraction algorithms. This enables them to model complex nonlinear systems.
In ref. [12], a discrete inverse wavelet transform methodology is employed to extract pertinent frequency bands from operational data, enabling the reconstruction and filtering of current sequences under distinct fault conditions. Subsequently, trend fluctuation analysis is conducted to achieve effective differentiation of minor faults. Building upon this, ref. [13] systematically reviews the evolution and application of the continuous wavelet transform (CWT) in rolling bearing micro-fault diagnosis, introducing a decision tree framework for optimal wavelet selection that enhances classification accuracy. Furthermore, ref. [14] proposes an advanced auditory signal fault diagnosis technique by synergistically integrating wavelet transform with empirical mode decomposition (EMD), leveraging sample entropy and singular value decomposition (SVD) to reduce signal-to-noise ratio while improving SVD performance. To address component degradation and mechanical wear in production systems, ref. [15] implements an artificial neural network (ANN)-based approach for minor fault detection and diagnosis through time-frequency analysis. Finally, ref. [16] designs a novel continuous decision function for support vector machine (SVM) classifiers, enabling simultaneous fault type identification and severity monitoring.
The data-driven fault diagnosis model has achieved promising results in detecting micro-faults. However, its generalization capability remains limited—when operating conditions (e.g., load or environmental variations) change, the model’s performance may degrade significantly.
To address the challenges of mechanical micro-fault diagnosis under variable operating conditions, this paper proposes a fault diagnosis model based on a multi-residual neural network structure and ER rule.
First, a benchmark condition generalization mechanism was employed within model, which selects multiple typical load condition as diagnostic anchor points based on a multi-residual neural network structure. For each typical load conditions, an independently trained deep learning sub-model was adopted to extract micro-fault features and perform diagnosis reasoning. Compared to the traditional artificial intelligence algorithms, deep learning models [17,18,19,20,21,22,23,24,25,26] can pursue fundamental data characteristics and structural information at a deeper level.
Furthermore, based on a sub-model credibility assessment mechanism, the cross-entropy loss function is used to calculate the sub-model divergence between predicted probability distribution and target probability distribution, and by using a predefined credibility assessment formula, the loss value of each sub-model further converted into relative credibility value, while also serves as belief degree for diagnostic condition assessment and serves as the weight in subsequent diagnostic category assessment.
Case studies demonstrate that compared to traditional machine learning algorithms, the proposed fault diagnosis model achieves higher diagnostic accuracy and result reliability for micro-fault issues under varying operational conditions.
The paper is organized as follows. Section 2 elaborates on the theoretical basis. Section 3 proposes a case study for performance verification and result analysis. Conclusions are explained in Section 4.
2. The Theoretical Basis
2.1. Information Transformation
Residual neural network model should utilize the micro-fault images for feature extraction, as the time-frequency analysis tool, the short-time Fourier transform (STFT) [27,28] can generate continuous spectrum through the time-frequency transformation of non-stationary signals:
where is the original signal and is the window function.
2.2. Training and Reasoning of Residual Neural Networks
Residual module as the basic building block of the residual neural network, in this section, a four-layer residual module (see Figure 1) serves as an example to illustrate the forward and backward propagation processes, with the corresponding equations provided below:
where x directly imports from the topmost layer; represents the activation function, W represents the convolution kernel weight, and b represents the bias. y is the output vector of the residual module.
For the output of the residual neural network, the cross-entropy loss function is adopted as follows:
where softmax(y) is used for normalization; represents the target output; Loss represents the loss value.
Based on the chain rule, the partial derivative of the loss function value can be obtained.
where W represents the neural network’s original weight, represents the learning rate, and W represents the update weight.
2.3. Diagnostic Condition Assessment
Cross-entropy loss function reflects the deviation between the predicted probability distribution and the target probability distribution. In this subsection, the loss value is used to measure the relative credibility among the sub-models and serves as a belief degree for diagnostic condition assessment, while also serving as the weight for subsequent diagnostic category assessment:
where represents the target category probability in one-hot encoded form, is the sub-model’s predicted category probability of the category after normalization, represents the relative credibility among the sub-models, represents the belief distribution, represents the belief degree of diagnostic condition relative to the condition anchor point , and represents sub-model’s weight for subsequent diagnostic category assessment.
2.4. Diagnostic Category Assessment
The proposed model uses Evidence Reasoning Rule (ER Rule) as the diagnostic reasoning fusion theory. First, the probability distributions of the diagnostic reasoning corresponding category need to be combined with the corresponding weights to obtain the basic probability masses.
where represents the basic probability masses. indicates the remaining basic probability masses which can be broken down into and two main parts.
Second, by using the basic probability masses, the i diagnostic reasoning and the th diagnostic reasoning can be aggregated into a new diagnostic reasoning, the aggregation process as follows:
where is the combined probability mass generated by aggregating the first i diagnostic reasoning with the th diagnostic reasoning; the combined probability mass for due to the possible incompleteness, and for due to the combined relative importance.
Finally, after all L diagnostic reasoning have been aggregated, the combined probability distribution are generated by using the following normalization process:
where is the diagnostic model’s diagnostic category probability of the fault category after normalization.
3. Performance Verification and Result Analysis
3.1. Case Description and Model Construction
In this subsection, the CWRU bearing dataset is selected to verify the model’s ability. The dataset is one of the most widely used datasets in the field of bearing fault diagnosis, and the motor bearing and load configuration closely match the dynamic operating conditions of vehicle driving motor, which effectively simulating key characteristics such as load switching and speed fluctuations.
It covers four load conditions of 0, 1, 2, and 3 horsepower, and includes three fault types: normal condition, inner race fault, outer race fault, and rolling element fault, with fault diameters categorized into three specifications: 7 mils, 14 mils, and 21 mils.
For the mechanical micro-fault diagnosis under variable operating conditions, the drive end bearing under the minimum defect size (7 mils) is selected as the diagnostic object, and the drive end data, sampling frequency at 48 kHz, are used to establish the dataset. For each bearing, faults are defected under each load condition, including 800 training samples and 200 test samples. Table 1 provides the drive-end bearing faults under four load conditions. Figure 2 shows the sample’s defect spectrum generated by STFT, with a size of 224 × 224 × 3.
For this case, a diagnostic model was established as shown in Figure 3, and the detailed structural parameters are given in Table 2. It consists of two main parts: the diagnostic reasoning part and the diagnostic assessment part. The diagnostic assessment part further includes three modules: the sub-models credibility assessment, the diagnostic condition assessment, and the diagnostic category assessment.
To ensure the adaptability of the diagnostic model in vehicle edge computing scenarios, four lightweight 67-layer residual neural network models were employed within the diagnostic reasoning part, and for each load condition, an independent sub-model is employed for training and diagnostic reasoning. Finally, the diagnostic condition assessment and diagnostic category assessment are conducted based on the ER rule.
3.2. Model Training and Result Analysis
In this subsection, the model conducted 2500-round iterative training, and the training results are shown in Figure 4 and Figure 5. Wherein Figure 4 shows the correct rate changes of the ResNet-67 model-1 4 separately on the corresponding training set and test set. The change curves show that the sub-models have a high accuracy on the corresponding training set and test set, and there is no obvious overfitting phenomenon.
Figure 5 shows the loss value change of ResNet-67 model-1∼4 separately on the corresponding training set, according to the change curves of loss values, sub-models have the ability of rapid optimization.
Figure 6 shows the diagnostic reasoning of the multi-ResNet-67-ER rule-based model on the test set. The diagnostic model has a high identification accuracy for all diagnostic categories under four working conditions.
3.3. Experimental Comparison
To evaluate the model’s performance, this subsection presents traditional models based on the BP neural network [29], RBF neural network [30], and SVM [31] for comparative evaluation. All four fault categories under four load conditions are treated as independent discrete classes during traditional models training (totaling 16 classes). The correct rate on the test set between the proposed model and traditional models is shown in Figure 7 and summarized in Table 3.
The former presents the models’ diagnostic reasoning results, while the latter displays the correct rates on the training set and test set. The proposed model achieves a higher correct rate than those of the BP network, RBF network, and SVM models. These comparisons demonstrate the superior performance of the model.
4. Conclusions
To tackle the micro-fault diagnosis of the vehicle power train system under variable operating conditions, this paper introduces a multi-ResNet67 and ER rule-based fault diagnosis model. The model employs a benchmark condition generalization mechanism, which selects multiple typical load conditions as diagnostic anchor points and integrates a sub-model credibility assessment mechanism to perform diagnostic condition assessment and category assessment. This integration achieves the model’s micro-fault diagnosis under varying vehicle operating conditions. Case studies demonstrated that, compared to traditional machine learning algorithms, the proposed model achieves higher diagnostic accuracy for micro-faults under variable operating conditions.
The contributions of this study can be summarized as follows:
- 1.A diagnostic model employing a benchmark condition generalization mechanism was proposed, which selects multiple typical load conditions as diagnostic anchor points based on a multi-residual neural network structure.
- 2.By integrating a sub-model credibility assessment mechanism to perform diagnostic condition assessment and category assessment based on ER rule, this model achieves micro-fault diagnosis under varying vehicle operating conditions.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1Afgan N.H. Carvalho M.G. Pilavachi P.A. Tourlidakis A. Olkhonski G.G. Martins N. An expert system concept for diagnosis and monitoring of gas turbine combustion chambers Appl. Therm. Eng.20062676677110.1016/j.applthermaleng.2005.04.020 · doi ↗
- 2Andrea T. Andrea L. Energy system diagnosis by a fuzzy expert system with genetically evolved rules Int. J. Thermodyn.200811115121
- 3Nan C. Khan F. Iqbal M.T. Real-time fault diagnosis using knowledge-based expert system Process Saf. Environ. Protection 200886557110.1016/j.psep.2007.10.014 · doi ↗
- 4Mostafa S.A. Ahmad M.S. Mohammed M.A. Obaid O.I. Implementing an expert diagnostic assistance system for car failure and malfunction Int. J. Comput. Sci. Issues 2012916941814
- 5Ma B. Jiang Z.-N. Wei Z.-Q. Development of the task-based expert system for machine fault diagnosis J. Phys. Conf. Ser.2012364012043
- 6Kodavade D.V. Apte S.D. A universal object oriented expert system frame work for fault diagnosis Int. J. Intell. Sci.20122810.4236/ijis.2012.23009 · doi ↗
- 7Wan H. Zhang Z. He W. Li M. Zhu H. A new automated interval structure belief rule base-based fault diagnosis method for complex systems Nonlinear Dyn.20251138391842210.1007/s 11071-024-10577-z · doi ↗
- 8Hsiao T. Weng M.C. A hierarchical multiple-model approach for detection and isolation of robotic actuator faults Robot. Auton. Syst.20126015416610.1016/j.robot.2011.10.003 · doi ↗