Bioinspired algorithm based on Physarum polycephalum for the formation of decentralized mesh networks in multi-robot systems
Dieisson Martinelli, André Schneider de Oliveira, Vivian Cremer Kalempa

TL;DR
This paper introduces a bio-inspired algorithm for decentralized robot coordination, inspired by Physarum polycephalum, to efficiently manage mesh networks in multi-robot systems.
Contribution
The novel contribution is a decentralized mesh network algorithm inspired by Physarum polycephalum, enabling efficient and resilient robot coordination.
Findings
Robots formed and maintained functional networks using only local perception.
Network connections were established in under two seconds and reconfigured instantly after faults.
Scalability was validated with new robots integrated in 0.092 seconds on average.
Abstract
This work proposes a bio-inspired approach for decentralized coordination in multi-robot systems, applied to a simulated port scenario. The methodology integrates the Robot Operating System (ROS) with the Stage simulator, enabling modeling of a port environment with three autonomous robots, each capable of navigation and obstacle avoidance. The main contribution is a connectivity module inspired by Physarum polycephalum, which manages the mesh network and allows decentralized task sharing whenever connections exist. The algorithm adapts continuously to robot movement and environmental changes, ensuring efficient communication when possible and autonomous operation when disconnected. Experiments confirmed that robots relying only on local perception can form and maintain a functional network. Results showed connections established in less than two seconds on average and reconfigured…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
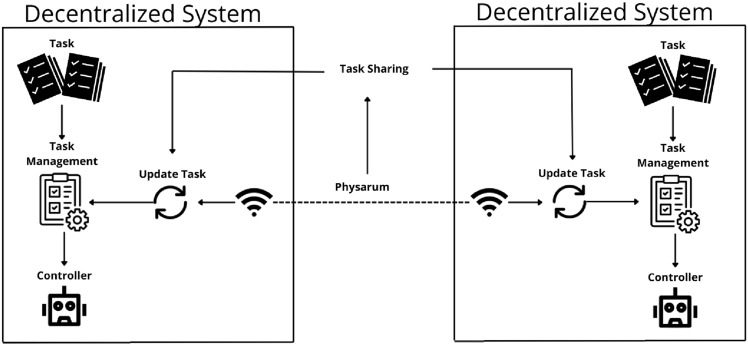 Figure 1
Figure 1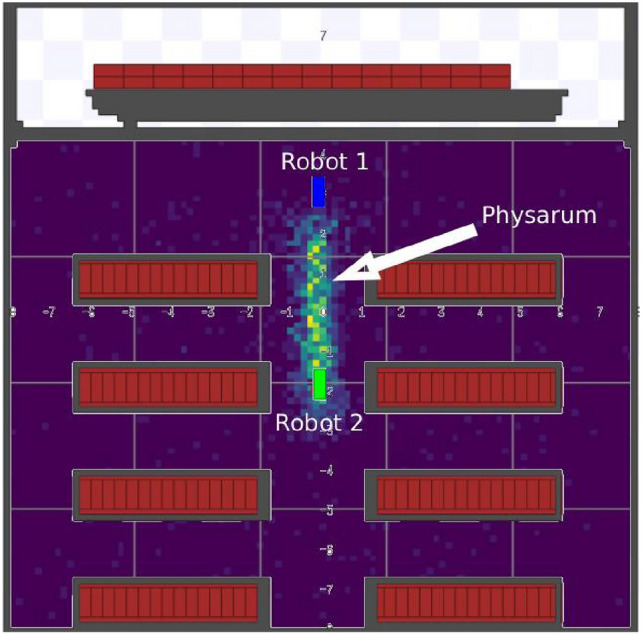 Figure 2
Figure 2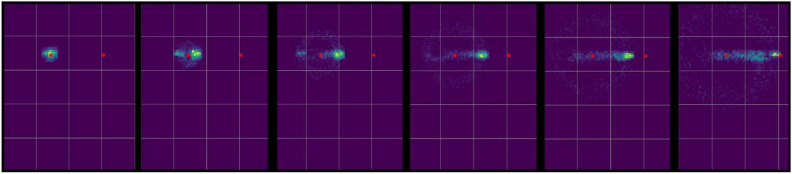 Figure 3
Figure 3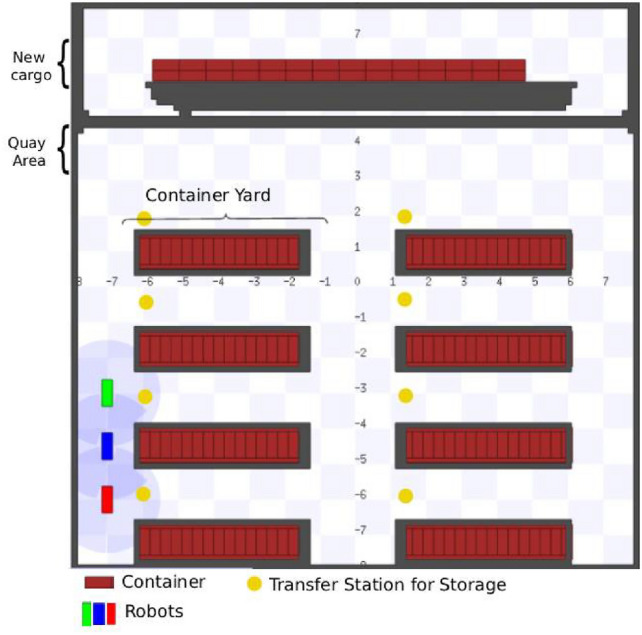 Figure 4
Figure 4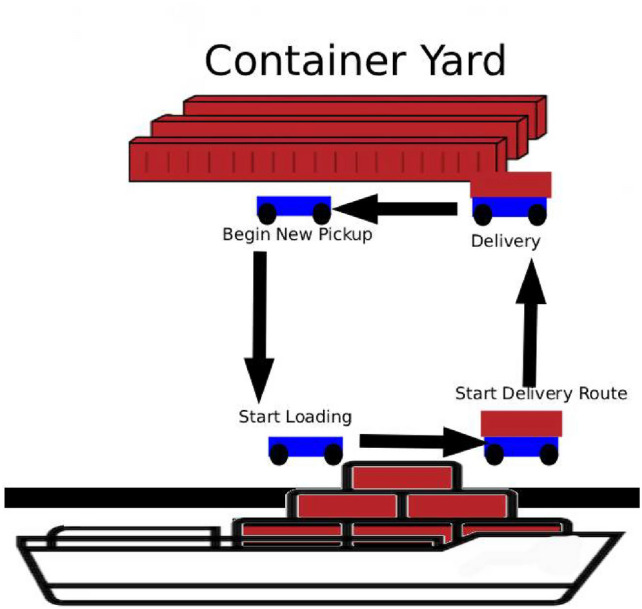 Figure 5
Figure 5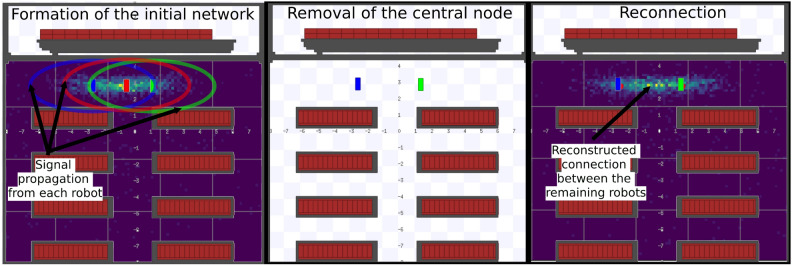 Figure 6
Figure 6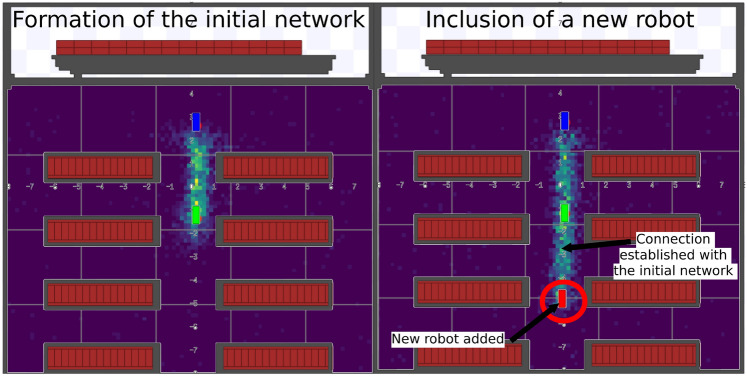 Figure 7
Figure 7Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsSlime Mold and Myxomycetes Research · Modular Robots and Swarm Intelligence · DNA and Biological Computing