Automating PINN-based kinematic resolution of robotic joints using robotic process automation frameworks
Parth Agrawal, Pavithra Sekar, Kush Kumar Kushwaha

TL;DR
This paper combines physics-informed neural networks and robotic process automation to improve robotic joint control and motion planning.
Contribution
The novel integration of PINN techniques with RPA tools enhances robotic control precision and efficiency.
Findings
PINN techniques like Extended PINNs and Hybrid PINNs reduce training costs and improve convergence.
Combining PINNs with RPA tools streamlines robot control and motion planning in dynamic environments.
PDE-Inspired PINNs integrated with ROS and RPA improve real-world robotic navigation and manipulation.
Abstract
This paper explores the integration of Physics-Informed Neural Networks (PINNs) and Robot Process Automation (RPA) tools in modeling and controlling rigid robotic joint motion. PINNs, which integrate physical laws with neural networks, offer a promising solution for solving both forward and inverse problems in robotics, while RPA tools provide the means to automate and streamline these processes. The study discusses various PINN techniques, including Extended PINNs, Hybrid PINNs, and Minimized Loss techniques, developed to address issues such as high training costs and slow convergence rates. By combining these advanced PINN approaches with RPA tools, the research aims to enhance the precision and efficiency of robot control, motion planning, and process automation, particularly in non-linear and dynamic coupling situations. We also examine PDE-Inspired PINNs for motion planning in…
Click any figure to enlarge with its caption.
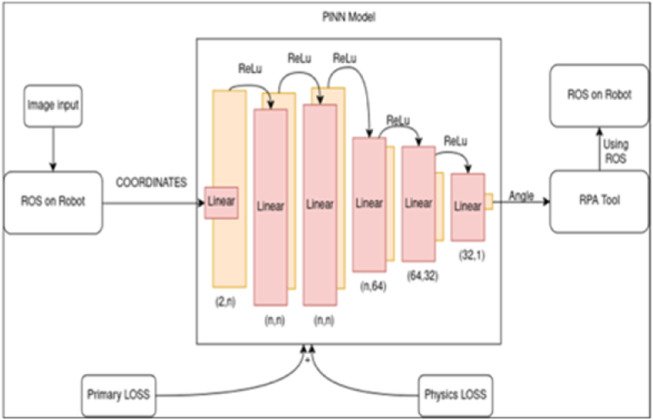 Figure 1
Figure 1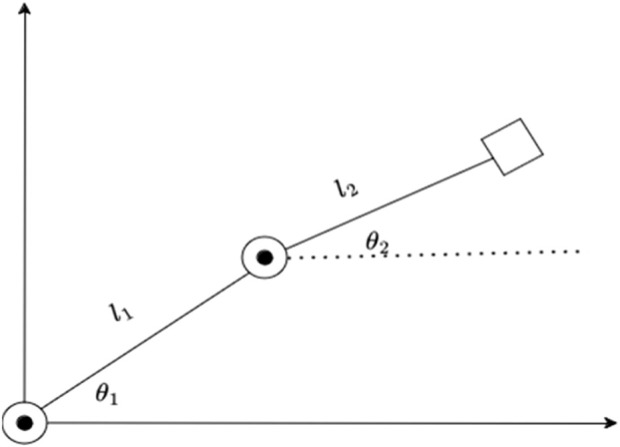 Figure 2
Figure 2 Figure 3
Figure 3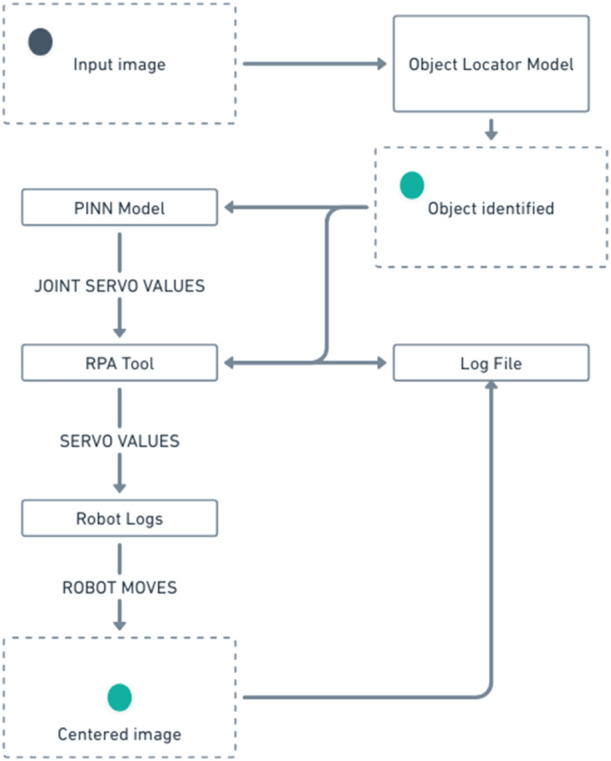 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsModel Reduction and Neural Networks · Machine Learning in Materials Science · Robot Manipulation and Learning