Data-driven acceleration of mixed-integer bilinear programs: a comparative study for robot motion planning
Xuan Lin

TL;DR
This paper compares data-driven methods to speed up solving complex optimization problems for robot motion planning, showing promising results for real-time applications.
Contribution
A comparative study of data-driven acceleration techniques for MIBLPs in robot motion planning, including novel reformulation strategies and empirical evaluations.
Findings
MICP achieves fast solving speeds suitable for real-time computation with sufficient data.
MPCC achieves higher success rates with limited data.
The approach enables motion planning for the SCALER robot to transition between configurations.
Abstract
This paper presents a comparative study of data-driven acceleration techniques for mixed-integer bilinear programs (MIBLPs) applied to robot motion planning. MIBLPs combine discrete decision variables and nonlinear constraints, making them computationally challenging for real-time robotics applications. We investigate two reformulation strategies: (1) converting binary variables into continuous variables with complementarity constraints (MPCC), and (2) converting bilinear constraints into mixed-integer linear constraints using McCormick envelopes (MICP). Using offline computed solutions as datasets, we apply K-nearest neighbor methods to warm-start both reformulations. We experimented with the proposed data-driven MIBLP formulation for motion planning on a linear inverted pendulum with contacts, and planning motion using a single rigid body model with mode transitions and contacts. Our…
Click any figure to enlarge with its caption.
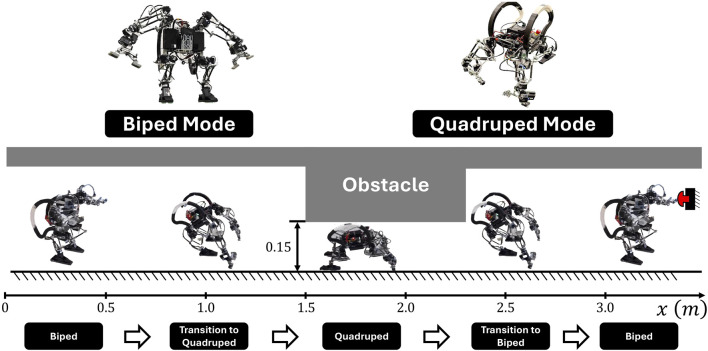 Figure 1
Figure 1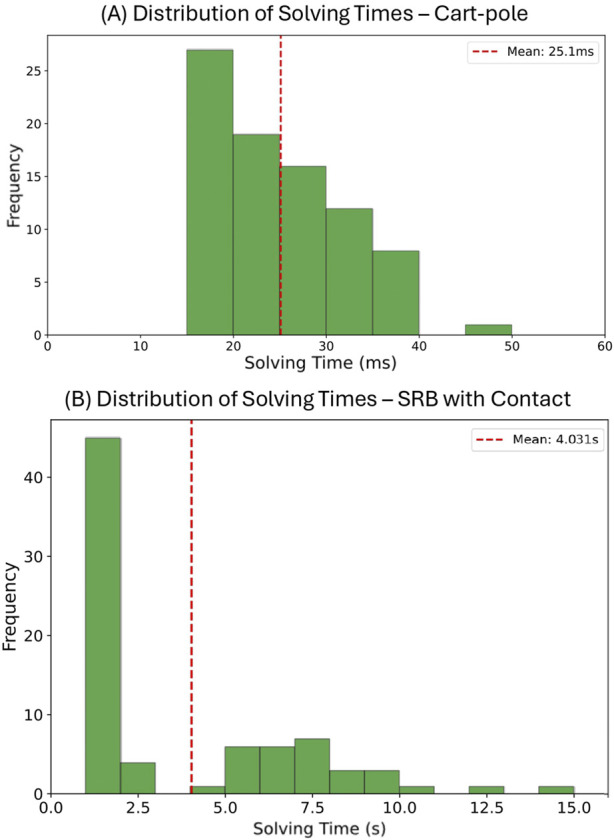 Figure 2
Figure 2Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Path Planning Algorithms · Robotic Mechanisms and Dynamics · Robot Manipulation and Learning