Autonomous navigation in unstructured outdoor environments using semantic segmentation guided reinforcement learning
Ahmed Tibermacine, Imad Eddine Tibermacine, Djouher Akrour, Abdelaziz Rabehi, Mustapha Habib

TL;DR
This paper introduces a new system for autonomous robots to navigate through complex forest environments using vision and machine learning.
Contribution
The novel framework combines semantic segmentation with reinforcement learning for GPS-free navigation in unstructured outdoor settings.
Findings
The system achieves an 86.7% success rate in following forest trails.
It demonstrates low collision frequency and precise path tracking in complex scenarios.
Experiments confirm the effectiveness of combining perception and control modules.
Abstract
Robust autonomous navigation in dense, unstructured environments such as forests presents a longstanding challenge in robotics due to complex terrain geometry, dynamic occlusions, and unreliable global positioning signals. This paper proposes a hybrid perception-and-control framework that integrates deep semantic segmentation with reinforcement learning to enable intelligent, vision-driven navigation in visually cluttered forest trails. The system combines Mask R-CNN for pixel-level trail segmentation with a Soft Actor-Critic (SAC) agent that learns adaptive navigation policies under continuous action spaces. A Pure Pursuit controller translates visual predictions into smooth motor commands, ensuring path adherence and stability. The model is trained and evaluated in a high-fidelity forest simulation environment featuring natural obstacles, variable lighting, and randomized trail…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
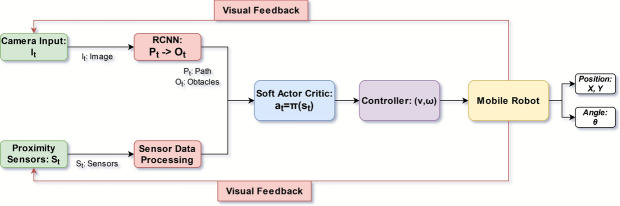 Figure 1
Figure 1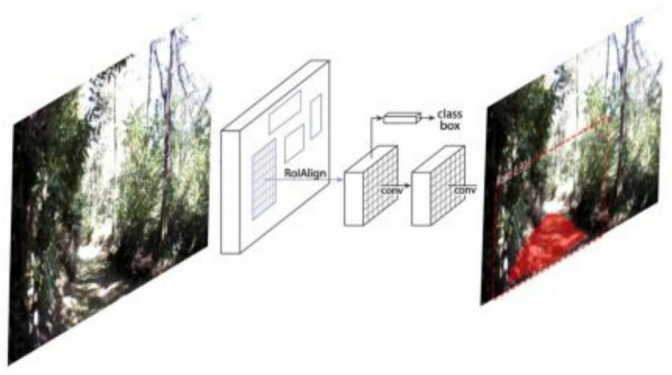 Figure 2
Figure 2 Figure 3
Figure 3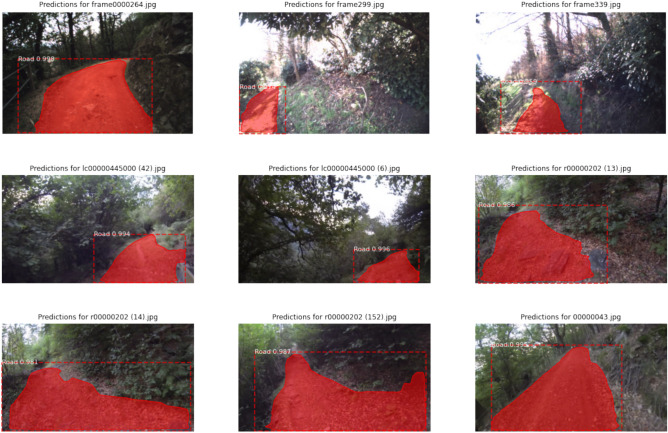 Figure 4
Figure 4 Figure 5
Figure 5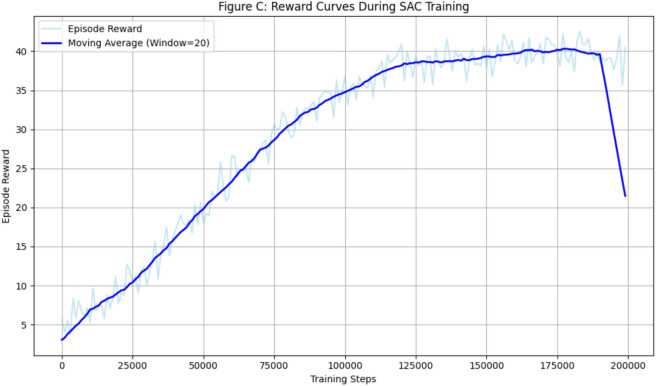 Figure 6
Figure 6Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Path Planning Algorithms · Reinforcement Learning in Robotics · Autonomous Vehicle Technology and Safety