FORMIGA: a fleet management framework for sustainable human–robot collaboration in field robotics
Beril Yalcinkaya, Micael S. Couceiro, Salviano Soares, António Valente

TL;DR
FORMIGA is a framework that enables sustainable human-robot collaboration in field robotics by improving task efficiency and reducing workload.
Contribution
FORMIGA introduces a novel framework integrating human operators and robots using LLMs for task execution in field robotics.
Findings
FORMIGA demonstrated adaptive task allocation and faster task completion in simulations.
Operator workload was significantly reduced compared to semi-autonomous control.
The framework supports sustainability through productivity and resource efficiency.
Abstract
Robotic fleet management systems are increasingly vital for sustainable operations in agriculture, forestry, and other field domains where labor shortages, efficiency, and environmental concerns intersect. We present FORMIGA, a fleet management framework that integrates human operators and autonomous robots into a collaborative ecosystem. FORMIGA combines standardised communication through the Robot Operating System with a user-centered interface for monitoring and intervention, while also leveraging large language models to generate executable task code from natural language prompts. The framework was deployed and validated within the FEROX project, a European initiative addressing sustainable berry harvesting in remote environments. In simulation-based trials, FORMIGA demonstrated adaptive task allocation, reduced operator workload, and faster task completion compared to…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
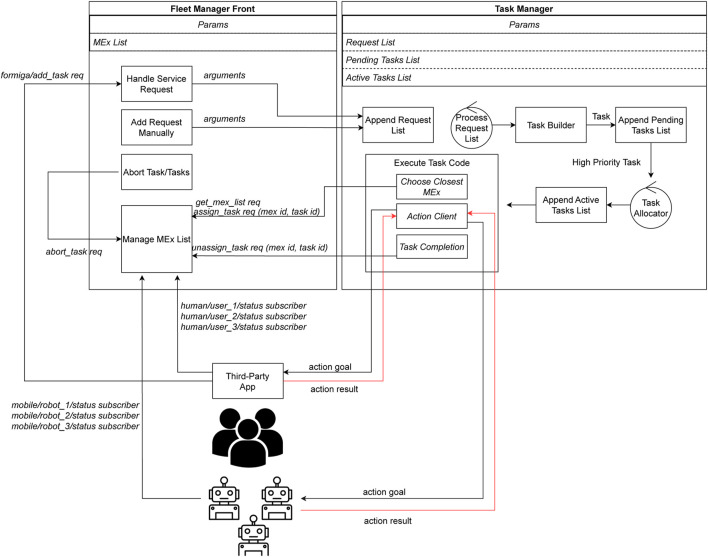 Figure 1
Figure 1 Figure 2
Figure 2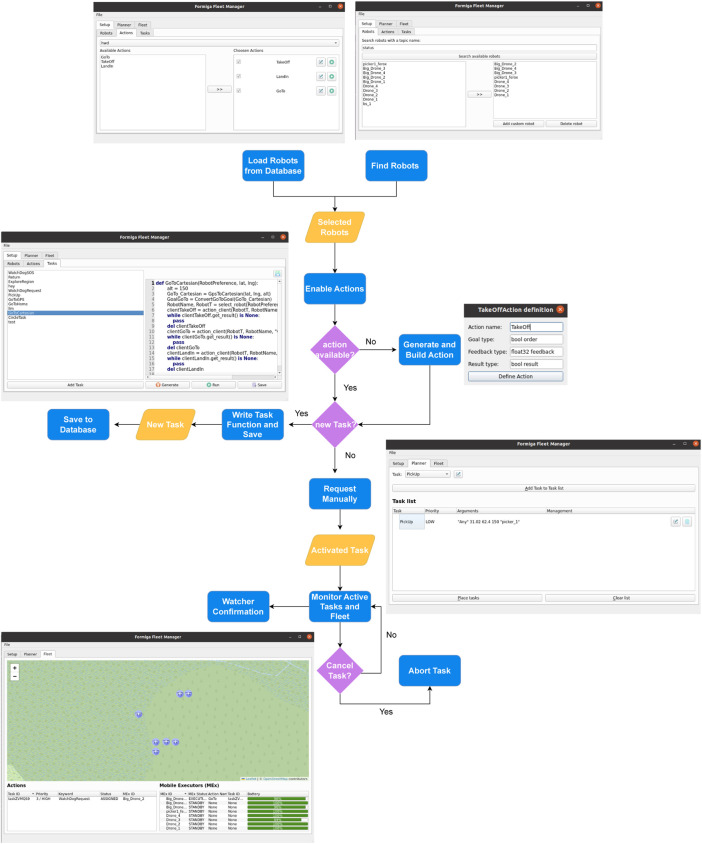 Figure 3
Figure 3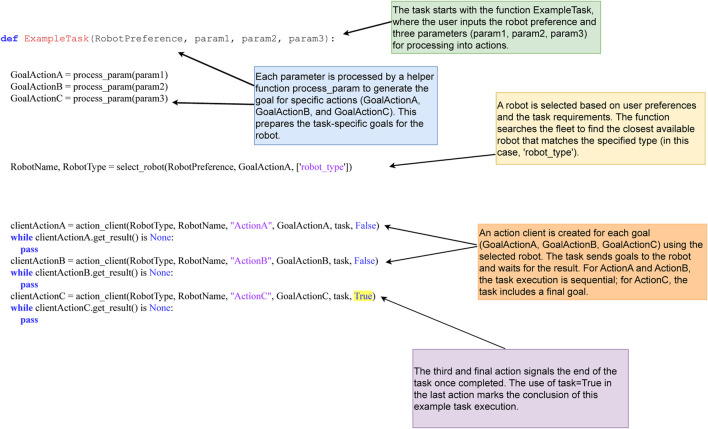 Figure 4
Figure 4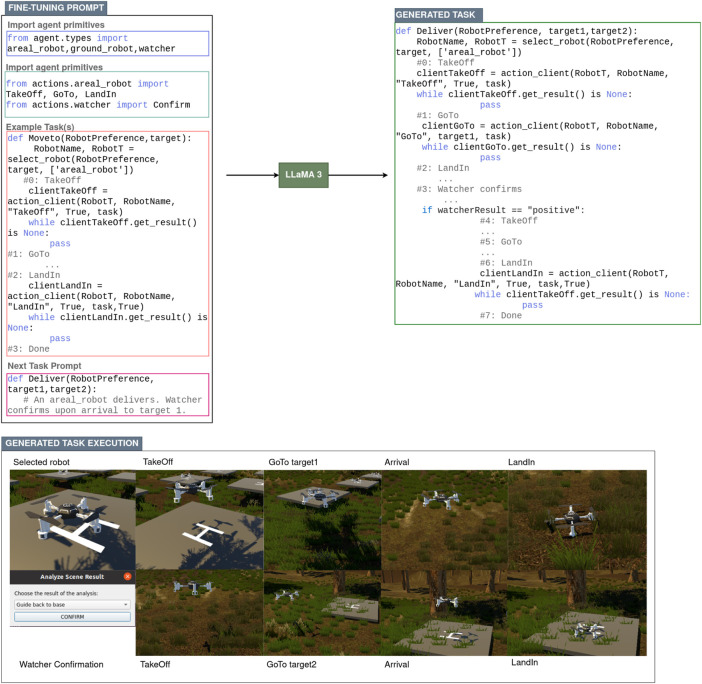 Figure 5
Figure 5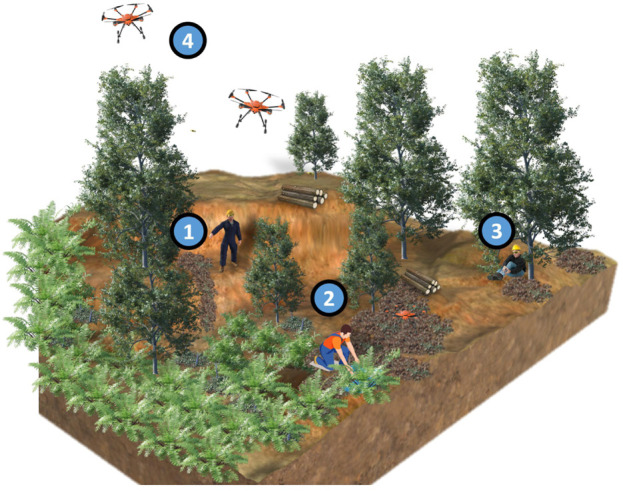 Figure 6
Figure 6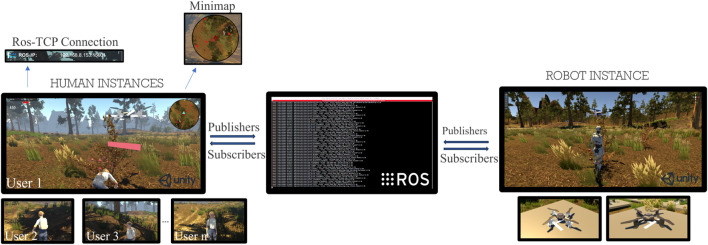 Figure 7
Figure 7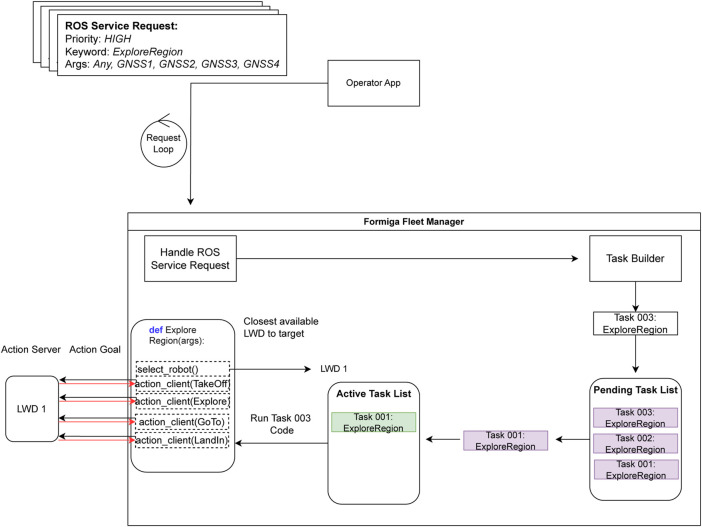 Figure 8
Figure 8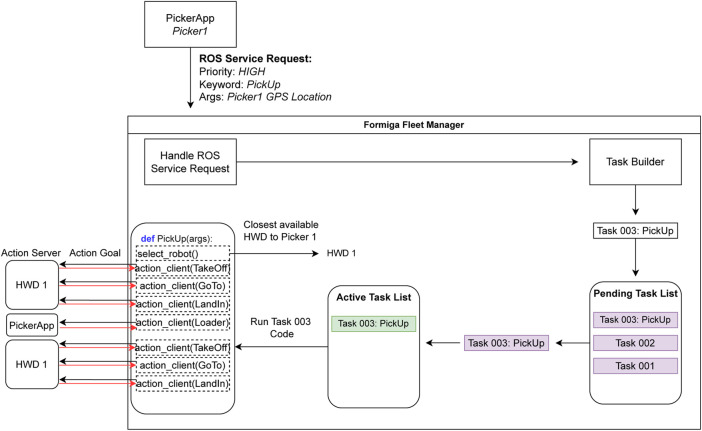 Figure 9
Figure 9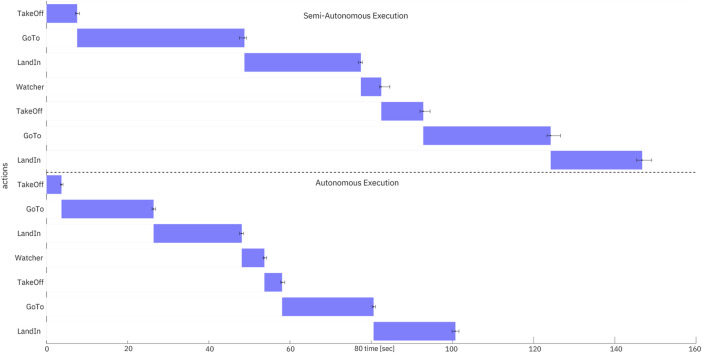 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobot Manipulation and Learning · Smart Agriculture and AI · Agriculture and Farm Safety