Active Compensation Fault-Tolerant Control for Uncertain Systems with Both Actuator and Sensor Faults
Xufeng Ling, Haichuan Xu, Fanglai Zhu

TL;DR
This paper introduces a new control method that can handle both sensor and actuator faults in uncertain systems, ensuring stability and performance.
Contribution
A novel fault reconstruction method and FTC scheme that simultaneously handles sensor and actuator faults using a combination of observers.
Findings
The proposed method decouples sensor faults using an output transformation and a reduced-order observer.
An interval observer achieves asymptotic convergence for fault reconstruction.
The FTC scheme ensures asymptotic stability even with simultaneous sensor and actuator faults.
Abstract
This paper develops a novel fault reconstruction (FR) method and an FR-based fault-tolerant control (FTC) scheme for systems suffering from both sensor and actuator faults based on the combination of a Luenberger-like reduced-order observer and an interval observer. Firstly, by introducing an output transformation, an auxiliary output that is able to decouple the sensor fault is obtained. Secondly, for addressing the external disturbance and actuator fault, a multiple unknown input (MUI) is formed, and a reduced-order observer that is able to decouple the MUI is constructed. Consequently, asymptotic convergence estimations of the state and the sensor fault can be accomplished. Thirdly, in order to obtain the asymptotic convergence actual FR (AFR), an interval observer is designed. After this, an algebraic connection of the MUI and the state error estimation is given, and, based on the…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
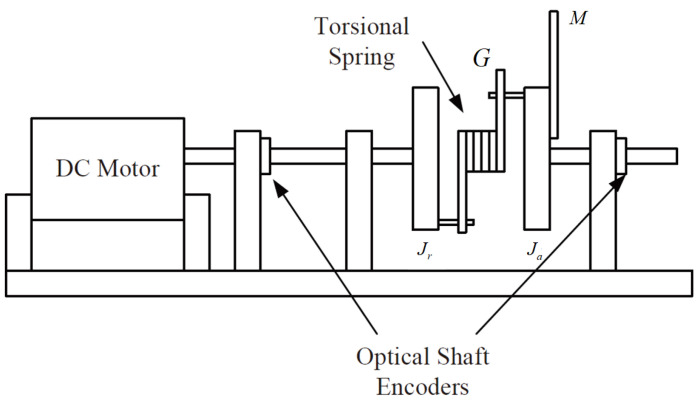 Figure 4
Figure 4- —National Natural Science Foundation of China
Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsFault Detection and Control Systems · Stability and Control of Uncertain Systems · Adaptive Control of Nonlinear Systems
1. Introduction
Ensuring the reliability and safety of practical control system operations is always a critical and challenging issue in control theory and control engineering. Actuators and sensors, as essential components, are particularly vulnerable to malfunctions due to their frequent operations in harsh environments [1,2,3,4,5,6], resulting in faults which may greatly degrade system performances. Therefore, the techniques of fault detection (FD), fault reconstruction (FR), and fault-tolerant control (FTC) play crucial roles in maintaining system performances when systems suffer from actuator and sensor faults. Hence, the FD, FR, and FTC techniques have been investigated intensively for decades and many significant methods have been developed for varieties of control systems [7,8,9,10,11,12,13,14,15,16,17,18,19]. For instance, in [11], a distributed adaptive event-triggered FTC scheme was proposed with a hierarchical structure for heterogeneous multi-agent systems (MASs), which prevents fault propagation and eliminates the need for continuous communication between agents. In [12], FDI of an active suspension system with actuator and sensor faults was investigated with two unknown input observers. FR can let the designers know more information about systems and, thus, make the designs much more convenient. Many researchers have explored FR techniques in the context of various control systems [13,14,15,16]. In [17], an intelligent-observer-based precise and fast AFR approach was developed. In [18], a fuzzy synthesized learning and Luenberger-like observer method was proposed for AFR in T-S fuzzy systems. In [19], for a nonlinear descriptor system, a robust AFR was designed based on adaptive observer for addressing the actuator additive faults.
Generally speaking, FTC techniques can be divided into two main categories: active fault-tolerant control (AFTC) and passive fault-tolerant control (PFTC). PFTC can be regarded as a robust control scheme constructed to reject the fault, without considering the fault occurrences or forms. On one hand, although the flexibility of a PFTC is lower than that of an AFTC in dealing with the faults, research on PFTC can also be found in the literature [20,21,22,23,24,25]. On the other hand, the AFTC method becomes the dominated FTC because of its flexibility and high pertinence to faults. The major strategy of an AFTC is adjusting the controller by referring to fault conditions, resulting in a better fault-tolerance performance. It should be emphasized that observer-based FR has become one of the fundamentals of AFTC. Therefore, in recent years, the AFTC methods have gained much attention [26,27,28,29,30,31]. For instance, a dynamic output feedback FTC strategy for switched affine systems subject to actuator faults was proposed, utilizing fault estimation and a mode-dependent dwell-time switching scheme to ensure practical exponential stability [32]. Similarly, an observer-based robust FTC scheme was proposed for discrete-time T-S fuzzy models with unavailable premise variables [33]. Kalman-filter-based fault detection and diagnosis were investigated for fault-tolerant control in quadcopters, improving safety under sensor and actuator faults in [34]. By leveraging model-based strategies, these approaches enable systems to maintain functionality even under fault conditions, underscoring the practical advantages of observer-based FTC in real-world applications.
Most existing work on observer-based FD, FR, or FTC focuses on dealing with either actuator or sensor faults separately [35,36]; little work can be found for handling actuator and sensor faults simultaneously [37,38,39,40]. In the present paper, FR and FTC design problems are discussed for uncertain systems subject to both actuator and sensor faults, as well as external disturbances. The major contributions of the paper are summarized as follows:
(1) Novel Integrated Unified Framework. Most existing observer-based FTC studies focus on handling either actuator faults or sensor faults separately. This work tackles a more challenging and realistic scenario where actuator faults, sensor faults, and external disturbances coexist in the system. The proposed unified FR and FTC framework provides a systematic solution for concurrent multi-fault situations for uncertain systems.
(2) MUI Construction and Asymptotic Reconstruction. The actuator fault, external disturbance, and the control input are aggregated into a single MUI. A novel MUIR scheme is developed via an interval observer that provides asymptotic estimates of the actual MUI. Crucially, the proposed MUIR decouples the control signal, and this significant decoupling feature is essential for the subsequent controller synthesis.
(3) Separation-Principle-Based FTC Design. The FTC framework consists of a reduced-order observer, an MUIR, and a state-feedback controller. We point out that the three parts satisfy the so-called separation principle. Therefore, a convenient design procedure of observer-based FTC for handling both actuator and sensor faults simultaneously is developed.
The remainders of this paper are organized as follows: Section 2 introduces the preliminaries. Section 3 designs a reduced-order observer for obtaining the estimation of the state and sensor fault reconstruction (SFR). Section 4 designs an interval observer for reconstructing MUIs, and Section 5 verifies the effectiveness of the proposed methods by two simulation examples. Section 6 provides the conclusions of the paper.
2. Preliminaries
In this section, some preliminaries, including notations, lemmas, system description, and preconditions, are presented.
Notations: is an matrix. We denote and , where and . Then, obviously, we have and . For another matrix . and denote all-zero and all-one column vectors, respectively.
Definition 1. A matrix is a Metzler matrix if all of its off-diagonal entries are nonnegative. A matrix is a Hurwitz matrix if all of its eigenvalues have negative real parts.
Lemma 1([10]). For any matrix , one has , if , where , and .
Lemma 2([41]). For the system , one has for , if A is a Metzler matrix, and .
Consider system
where and are system state and output vectors, respectively. is the external disturbance impacting on the system state equation. In addition, stands for the sensor faults which need to be reconstructed. stands for the output of the actuator which can be modeled as , where and are the efficiency factor and bias signal of the actuator fault, respectively. When and , the actuator is in a healthy condition; otherwise, it is in a faulty condition. Thereby, the original system (1) can be modeled as
where is the actuator control input that needs to be designed, and can be taken as a multiple unknown input (MUI) of (2).
Assumption 1. The following rank condition:
is true for all complex scalar s with .
Assumption 2. The rank condition
holds.
Assumption 3. The actuator control input , efficiency factor , bias signal , external disturbance , and initial state are all bounded with and , where and , are known constant vectors, and and are two known constant scalars. The sensor fault is bounded.
Obviously, under Assumption 3, we have , where and .
Remark 1. In our method, all kinds of faults described by Table 1 can be handled in a general way: by constructing an MUI . The major technique we used is developing an MUIR that can estimate the actual MUI asymptotically in advance, and then designing a compensation controller by introducing the MUIR into the controller, leading to the closed-loop system under the controller being asymptotically stable. It should be noted that when , the MUI contains the control input which needs to be designed. In other words, the MUI couples with the control signal. Therefore, to accomplish the design goal by these two steps is a really challenging task because of the coupling between and .
3. Reduced-Order Observer and SFR
In this section, an output transformation is made and an auxiliary output which decouples the sensor fault is obtained. Then, a reduced-order observer which is able to estimate the state and reconstruct the sensor fault is designed.
3.1. Output Transformation
Make an output transformation of , then the system (1) or (2) can be expressed by
where is an auxiliary output with . Here, we denote by the generalized inverse of F satisfying , and when F is of full column rank, it has the exact expression of .
Lemma 3. When the sensor suffers from a fault, i.e., when , we have , which indicates that matrix is not a full row matrix.
Proof. On one hand, note that matrix F is with full column rank, then according to the singular value decomposition (SVD) method, there exist two orthogonal matrices and such that , where with being singular values of matrix F. On the other hand, note that ; then, by computing directly, we have
and
Thus,
which implies that . □
Now, from Lemma 3, we know that does not have full row rank, then there exists a nonsingular matrix such that , where is a matrix which is formed by the maximal linearly independent row vectors of , and naturally , i.e., has full row rank. Obviously, it holds that , where . If we introduce once more the auxiliary output of , then we have . As a result, System (1) is then further rewritten as
with being of full row rank.
Lemma 4. Under Assumption 1, the rank condition
is true for all complex scalar s with .
Proof. Based on (3) in Assumption 1, we can deduce that
which gives . That is, is true for all complex s with . Moreover, as
then we can conclude that (7) holds for all complex s with . □
Lemma 5. Under Assumption 2, we have .
Proof. It follows from (4) in Assumption 2 that
Thus, which is equivalent to . Furthermore, we have
which means that . □
3.2. Reduced-Order Observer Design
A reduced-order observer is designed for (6) to obtain the state estimation and SFR in this subsection.
Lemma 6([42]). Under Assumptions 1 and 2, for some positive symmetric definite matrix , there exist and , and a positive symmetric definite matrix such that
holds. Based on Smith orthogonal procedure, there exists a nonsingular matrix satisfying , where and . Next, we extend to be an orthogonal matrix , where . Now, we make an equivalent state transformation , and the system (6) or (1) becomes
where , and .
Lemma 7. For , and , we have
Proof. The proof of Lemma 7 can be completed by verifying it directly.In the following, we make the block vector or matrix decomposition: , and , where , and . By the second equation of (10), and recalling that , we can deduce that . That is, we have , where . Making a further state equivalent transformation of for (9) and using gives
where . Now, for the equivalent system (11), we design a reduced-order observer as follows:
□
Theorem 1. Under Assumptions 1 and 2, (12) is a reduced-order observer with dimension of (1) or (9), such that and, thus, , even if the original system (1) suffers from actuator and sensor faults simultaneously, where and .
Proof. On one hand, the observer error dynamic system can be obtained from the first equation of (12) and the second equation of (11):
On the other hand, by the first equation of (10), we have
which contains
By Lyapunov stability, we known that (14) implies that dynamic system (13) is asymptotically stable. Consequently, we can conclude that and, thus, . Moreover, from the output equation in (1), a sensor fault reconstruction method is developed based on the reduced-order observer (12) as . □
4. The Designs of MUIR and FTC
In this section, we firstly develop an MUIR method via an interval observer, and then an observer-based FTC scheme is developed.
4.1. MUIR Design
It follows from (11) that
For (15), we design an interval observer to obtain the interval estimation of as follows:
where is provided by reduced-order observer (12).
Theorem **2.**Under Assumptions 1 and 3, (16) is an interval observer of (15), which can lead to holding for all for some positive scalar , if Λ is selected to be a Metzler and Hurwitz matrix arbitrarily, and the initial values are determined as and .
Proof. The interval observer error system can be obtained through (15) and (16):
where and . By Lemma 1, and hold. Thus, there exists such that and hold for all . In addition, Assumption 3 indicates that , By Lemma 1, again, one has , which is equivalent to and . Now, if the is Hurwitz and Metzler, applying Lemma 2 on (17) yields and , which imply that holds for all .Based on the output upper and lower bound estimates, we aim to establish an algebraic connection of the MUI and the state estimation error. Initially, as , there exists a time-varying vector such that
where with and . Then, one has
where is a time-varying vector with if , otherwise . Meanwhile, by (18), we have
It comes from (16) that
where . Consequently, substituting the second equation of (16) and (21) into (20) gives
where . Comparing (15) with (22), we obtain
Note that ; thus, from (23), we have
where , and its existence can be guaranteed by Lemma 5. Now, by referring to (24), an MUIR method is developed by setting
where is determined by (19), and is taken as the identical estimation of in a finite time generated by the following differentiator [43]:
where are two positive scalar gains that need to be selected properly. Then serves as the identical estimation of in a finite time, and, thus, is the identical estimation of in a finite time. Subtracting (25) from (24) yields
where . Obviously, we have . □
Remark 2. MUIR (25) totally depends on the interval observer (16) and the differentiator (26). It is an algebraic one and is able to asymptotically estimate the actual MUI. Moreover, it should be emphasized that MUIR (25) decouples the control input . It is through this significant feature that the following controller (28) can realize the challenging task highlighted in Remark 1.
4.2. FTC Design
In this subsection, an FTC scheme is proposed based on the reduced-order observer (12) together with MUIR (25), which is given through the interval observer (16).
For System (1) and based on (5), we design FTC:
where is the feedback gain matrix, is given by the reduced-order observer (12), and is determined by (25). Now, substituting (28) into the first equation of (5) leads to
Furthermore, substituting (27) into (29) gives
Note that , and (30) becomes
From (31) and (13), the observer-based control closed-loop system is
Remark 3. The reduced-order-observer-based state and MUIR feedback controller (28) form the FTC, and (32) indicates that the FTC through the state feedback together with an MUIR has no relation to the eigenvalues of the original state feedback. The eigenvalues of the reduced-order observer (12) are not affected by the connection either. For this reason, the design of the state feedback gain matrix U, together with the design of the MUIR (25), and the reduced-order observer (12) can be fulfilled independently, and then just connected. This is called the separation property.
5. Simulations
This section presents two simulation examples containing a numerical simulation and a simulation for a practical system to demonstrate the effectiveness of the proposed approach.
5.1. Example 1
Consider an uncertain system (1) with system matrices as
Thus, one has and . For Assumption 1, by calling the MATLAB R2024a function of z = tzero(A, [ B zeros(4, 1)], C, [zeros(3, 1) F]), it returns an empty vector to z, which means that the system has no invariant zero. Consequently, Assumption 1 is satisfied. For Assumption 2, we can verify it directly by calling the MATLAB function of g = rank([eye(4) B zeros(4, 1); C zeros(3, 1) F]), and one obtains that g = 6 = n + m + r. Therefore, Assumption 2 is satisfied, and we point out that the system is unstable because it contains an eigenvalue of 4.002. In addition, we assume that the external disturbance is . In order to demonstrate the performances of the fault reconstruction and FTC, we assume that
Firstly, it is not difficult for us to obtain by calculation. Secondly, by selecting , the matrix can be obtained as which is a matrix having full row rank. Thirdly, by using Smith orthogonal procedure, there exists a nonsingular matrix and meeting , where and . Next, we extend to be an orthogonal matrix:
Moreover, solving (8) gives
Thus, we have
which gives , , , , and . As a result, we can calculate . Finally, based on these matrix parameters, the reduced-order observer (12) can be constructed.
Next, in order to construct the interval observer (16), the initial values and some parameters are given as , , , and . And, by calculation, ; thus, for all above parameters, Assumption 3 can be satisfied. Meanwhile, for the simulation, we set and . We select which is a Metzler and Hurwitz matrix. The result shows that the interval estimation of is satisfactory. Finally, based on separation principle, we design such that the eigenvalues of are , and −1.
Thus, the effectiveness of the AFR-method-based reduced-order observer (12) and interval observer (16) can be validated by Figure 1, Figure 2 and Figure 3. Figure 1 shows that the interval observer (16) can offer the interval estimation of correctly. Figure 2 indicates that the reduced-order observer (12) can estimate the actual state x asymptotically. In Figure 3, the MUIR (25) can reconstruct the MUIs asymptotically, and the sensor fault can be reconstructed by effectively. Moreover, the FTC performance also reflected by Figure 2. From Figure 2, we can see that the system states are driven to zero under the FTC, even if the system has external disturbance for the actuator fault and sensor fault.
5.2. Example 2
We consider a single-link robotic arm with a rotary joint driven by an electric motor, as illustrated in Figure 4. The dynamics of the model can be described by [44]:
where and are, respectively, the angular velocities of the rotor and the arm; represents the angular rotation of the rotor; represents the angular position of the arm; and are the moment of inertia of the rotor and the arm, respectively; is the torsional stiffness coefficient; is the damping coefficient; G is the driven gain; u is the control input signal; g stands for the gravitational acceleration; M is the payload mass; and L represents the moment arm length. Now, the state-space representation of the robotic system can be described by , where
where Assumptions 1 and 2 hold. Corresponding to the fault model, the system becomes
In order to apply our method to the nonlinear system (33), we linearize (33). As
(33) is linearized in form (1) by setting
For the simulation, we select the parameters , , and . The matrices C and F are selected as
In addition, the disturbance is chosen as and the faults are chosen as
Similar to Example 1, one can obtain that, by selecting the same as Example 1,
Then, based on Smith orthogonal procedure, there exists a nonsingular matrix and satisfying , where and . We extend matrix to be an orthogonal matrix:
Now, solving (8) gives
Thus, we have
Given , , , , , , we can calculate , . Finally, based on these matrix parameters, the reduced-order observer (12) can be constructed.
A single-link robotic arm.
We select and , and the resting initial values and some parameters are selected the same as Example 1, where Assumption 3 holds. For the interval observer (16), we select a Metzler and Hurwitz matrix . The output interval estimation performance is given in Figure 5. Based on the separation principle, we determine the feedback gain U by the pole place method: , which can result in the eigenvalues of being , and .
The interval observer (16) provides correct interval estimation in Figure 5, while the reduced-order observer (12) achieves asymptotic convergence state estimation in Figure 6. Figure 7 shows the performances of the MUIR and SFR. The FTC performance is also reflected by Figure 6, and it demonstrates that the system’s asymptotical stability can be reached although the system has an external disturbance, the actuator fault sensor fault.
Remark 4. Based on some of the existing literature [35,37], which investigates FTC problems, the primary advantages of the proposed method in the present paper can be summarized as follows: First, unlike most existing studies that only address either actuator faults or sensor faults separately, our approach simultaneously handles both sensor and actuator faults in the presence of external disturbances, offering a more comprehensive fault-tolerant control solution for complex uncertain systems. Second, instead of relying on robust or adaptive control techniques, which typically ensure only bounded convergence, we propose a novel MUIR method that asymptotically estimates the compounded actuator and disturbance signals. Then, by introducing the MUIR into the controller, a compensation controller is designed, leading to asymptotic stability of the closed-loop system, rather than merely bounded-error performance. Third, the proposed observer-based fault-tolerant control scheme satisfies the separation principle, meaning that the observer design, fault reconstruction, and controller synthesis can be carried out independently, thereby simplifying the overall design process and enhancing practical applicability.
6. Conclusions
In conclusion, this paper proposes a novel reduced-order observer-based approach for FR and FTC for systems with disturbance, actuator, and sensor faults. By introducing an output transformation to decouple sensor faults, an equivalent sensor fault-free system is derived. To address the unmeasured system state variables, actuator faults, and external disturbances, a reduced-order observer is designed first, and then an MUIR method is proposed through an interval observer. Subsequently, an FTC scheme is further developed to ensure system stability in the presence of faults. Theoretical analysis confirms that asymptotic stability of the uncertain systems can be guaranteed under the proposed observer-based FTC scheme. It should be emphasized that the designs of the reduced-order observer, the MUIR, and the FTC meet the separation principle. Determining how to introduce some new techniques, such as even-triggered strategy, to improve the proposed methods will be our further consideration.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1Bokor J. SzabóZ. Fault detection and isolation in nonlinear systems Annu. Rev. Control 20093311312310.1016/j.arcontrol.2009.09.001 · doi ↗
- 2Hwang I. Kim S. Kim Y. Seah C.E. A Survey of Fault Detection, Isolation, and Reconfiguration Methods IEEE Trans. Control Syst. Technol.20101863665310.1109/TCST.2009.2026285 · doi ↗
- 3Cheng C. Li X. Xie L. Li L. Autonomous dynamic docking of UAV based on UWB-vision in GPS-denied environment J. Frankl. Inst.20223592788280910.1016/j.jfranklin.2022.03.005 · doi ↗
- 4Zhou C. Jiang R. Luan F. Meng S. Wang Z. Dong Y. Zhou Y. He B. Dual-arm robotic fabric manipulation with quasi-static and dynamic primitives for rapid garment flattening IEEE/ASME Trans. Mechatronics 2025305845585510.1109/TMECH.2025.3556283 · doi ↗
- 5Zhou C. Luan F. Hu J. Meng S. Wang Z. Dong Y. Zhou Y. He B. Learning Efficient Robotic Garment Manipulation with Standardization Proceedings of the Forty-second International Conference on Machine Learning Vancouver, BC, Canada 13–19 July 2025
- 6Ling X. Xu H. Weng W. Zhu F. Distributed Consensus Control for Discrete-Time T–S Fuzzy Multiple-Agent Systems Based on an Unknown Input Observer Sensors 202424814910.3390/s 2424814939771882 PMC 11679411 · doi ↗ · pubmed ↗
- 7Li L. Luo H. Ding S.X. Yang Y. Peng K. Performance-based fault detection and fault-tolerant control for automatic control systems Automatica 20199930831610.1016/j.automatica.2018.10.047 · doi ↗
- 8Rahimi A. Kumar K.D. Alighanbari H. Fault Isolation of Reaction Wheels for Satellite Attitude Control IEEE Trans. Aerosp. Electron. Syst.20205661062910.1109/TAES.2019.2946665 · doi ↗