Activity Detection of Paralympic Athletes with Lower Limb Running-Specific Prosthesis During Extended Periods of Time: Software Development and Preliminary Validation
Mirco Tioli, Isotta Bernardoni, Maria Grazia Santi, Roberto Di Marco, Giuseppe Marcolin, Nicola Petrone, Andrea Giovanni Cutti

TL;DR
This paper introduces a new software tool to accurately detect the activities of Paralympic athletes using running-specific prostheses over long periods.
Contribution
The study presents a novel protocol and software for activity detection in Paralympic athletes with lower-limb prostheses.
Findings
The model achieved 98% accuracy in detecting activities of Paralympic athletes.
Stride counting errors were within a 1% margin across all activities.
The software was validated on elite Paralympic runners and triathletes.
Abstract
Monitoring the activities of athletes with lower-limb amputations who use running-specific prostheses is essential for evaluating their training regimes, as well as the effectiveness and mechanical fatigue wear of their prostheses over time. Recent advancements in Inertial Measurement Units (IMUs) and activity detection algorithms offer new opportunities for objective assessment, but their application in Paralympic sports remains unexplored. The aims of this work were to design and implement an innovative protocol and analytical software for short-term and long-term activity detection of athletes with transtibial and transfemoral amputation and then test its validity on a sample of elite Paralympic runners and triathletes. Overall, the ability of the model to detect activities presented an accuracy of 98%, and the error in the stride counting for all activities fell within a 1% margin.
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1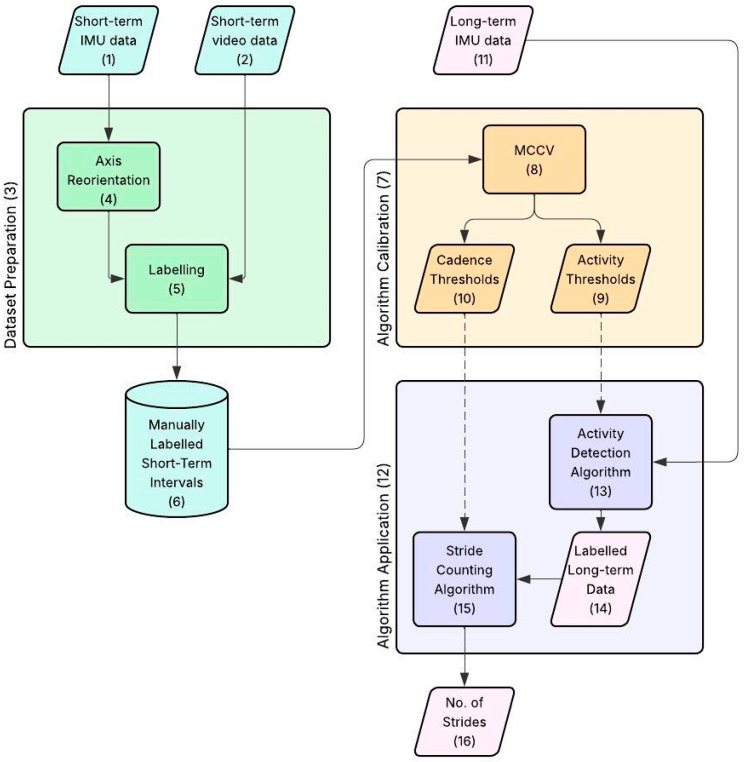 Figure 2
Figure 2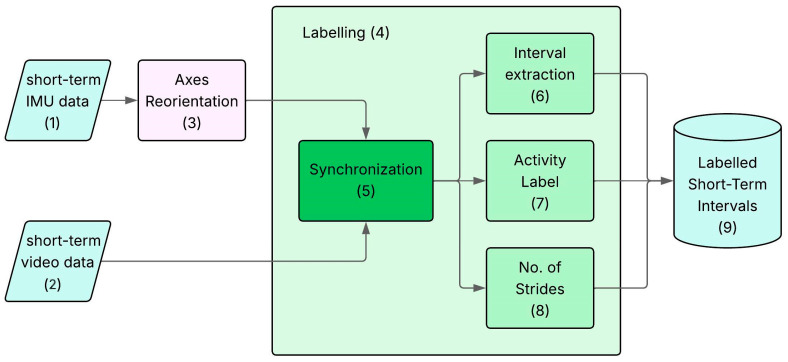 Figure 3
Figure 3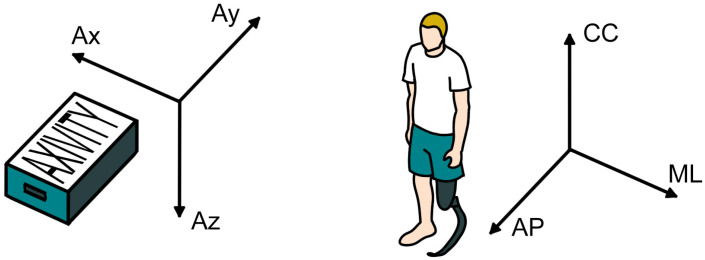 Figure 4
Figure 4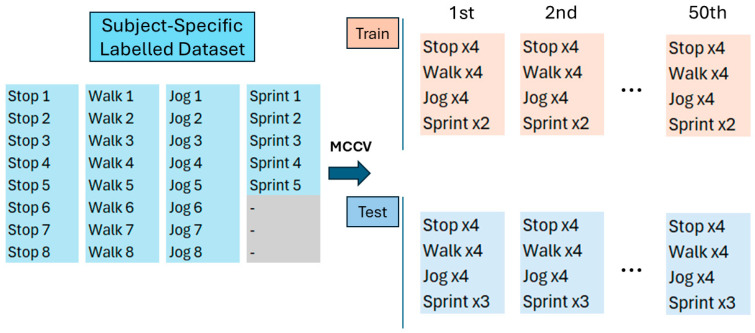 Figure 5
Figure 5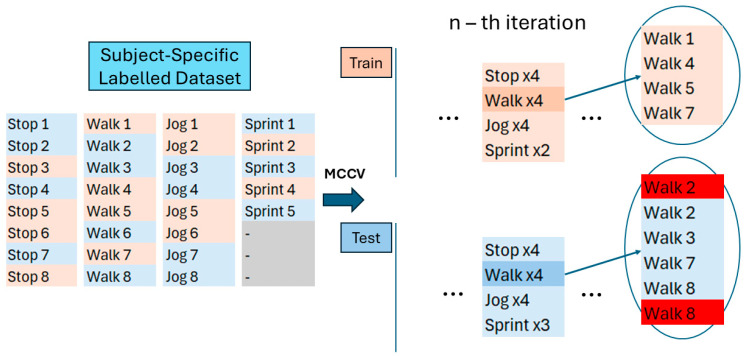 Figure 6
Figure 6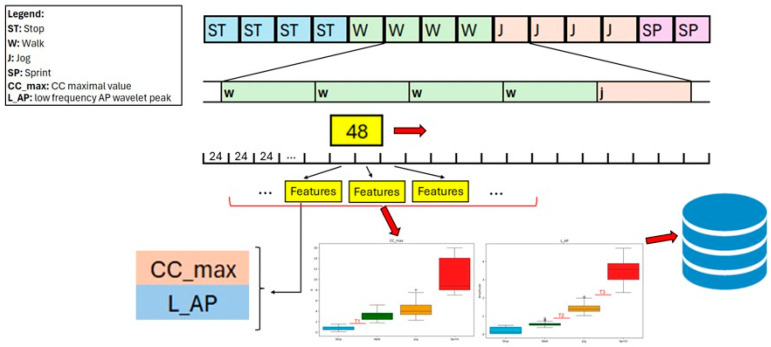 Figure 7
Figure 7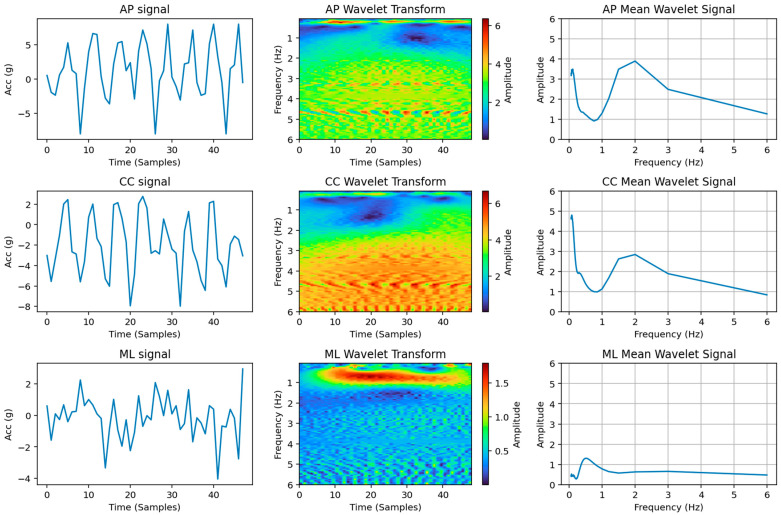 Figure 8
Figure 8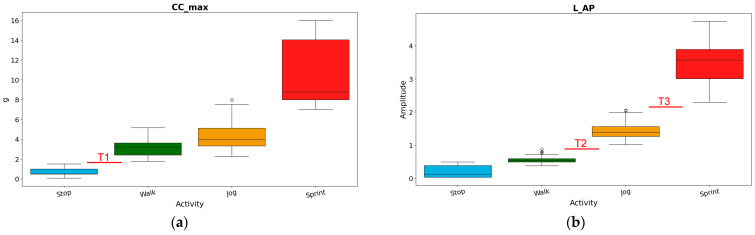 Figure 9
Figure 9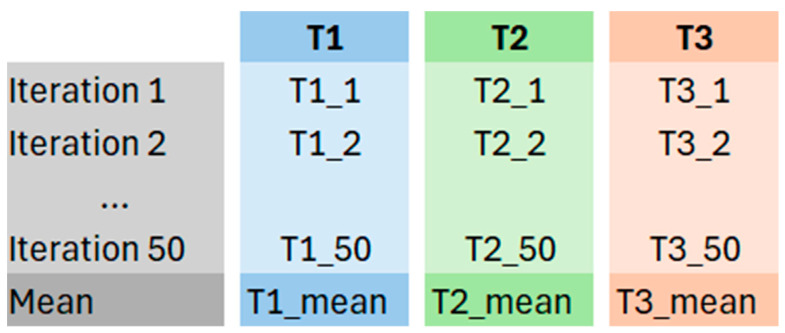 Figure 10
Figure 10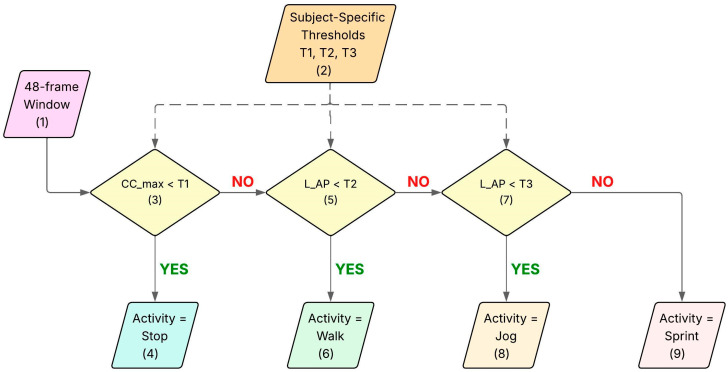 Figure 11
Figure 11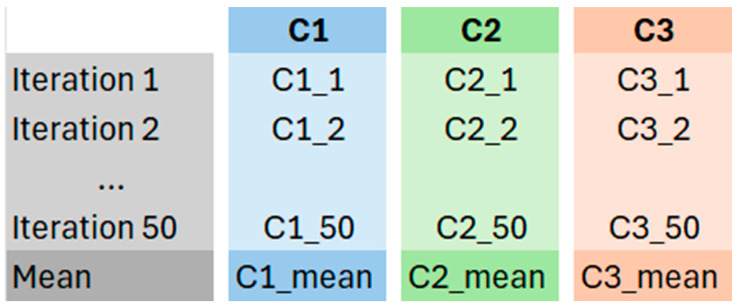 Figure 12
Figure 12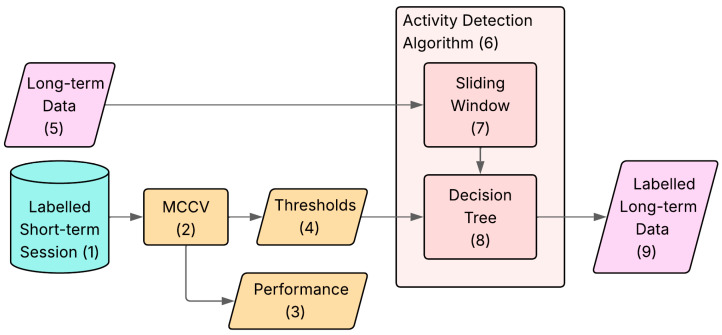 Figure 13
Figure 13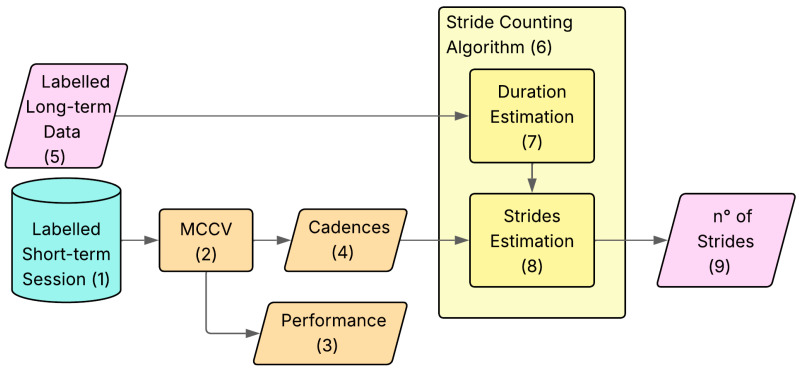 Figure 14
Figure 14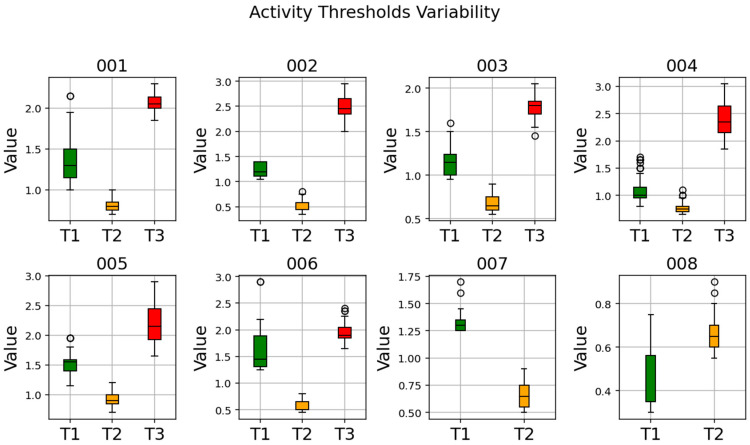 Figure 15
Figure 15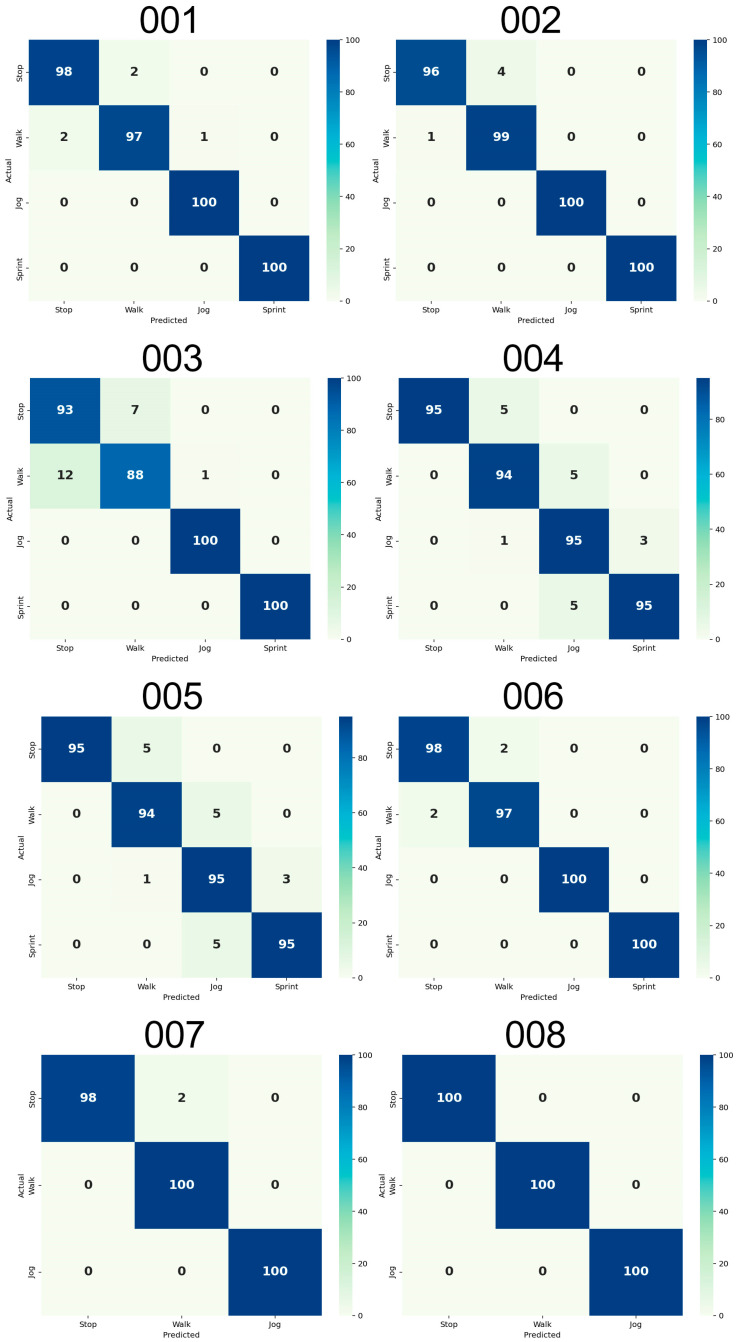 Figure 16
Figure 16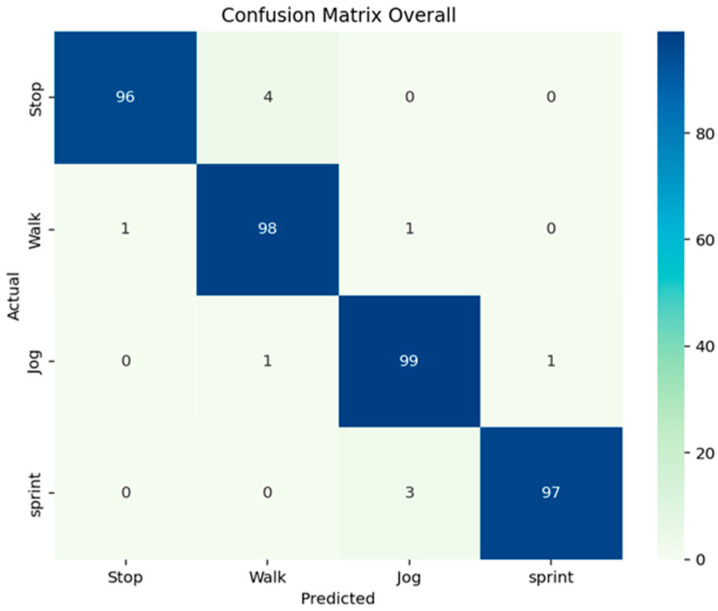 Figure 17
Figure 17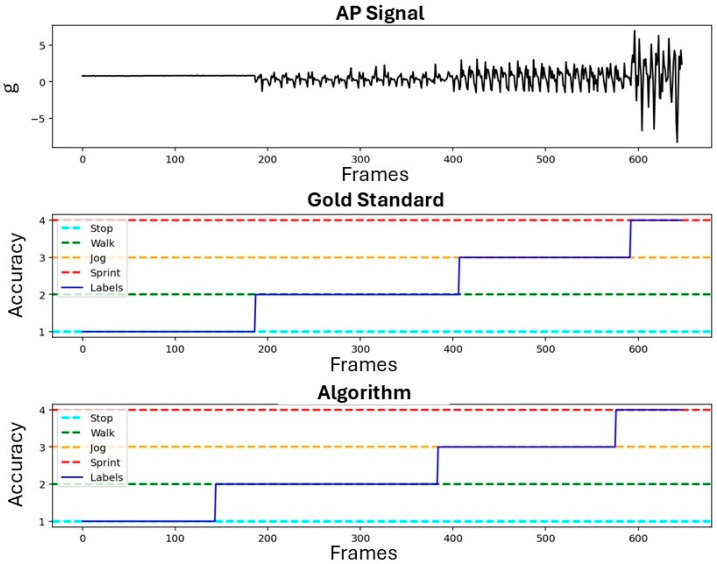 Figure 18
Figure 18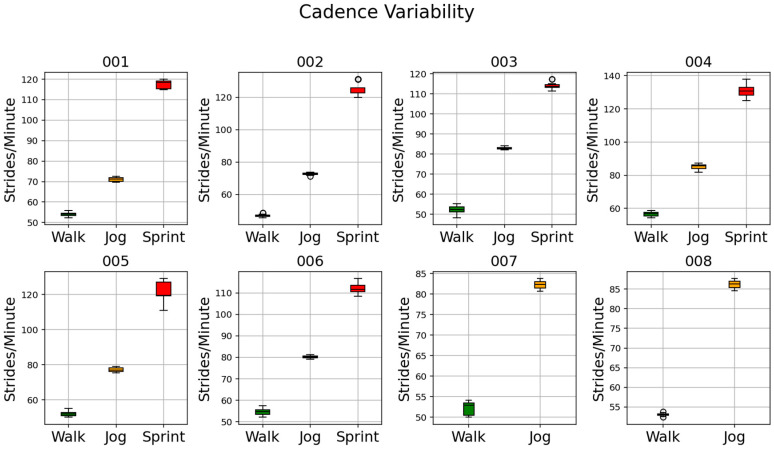 Figure 19
Figure 19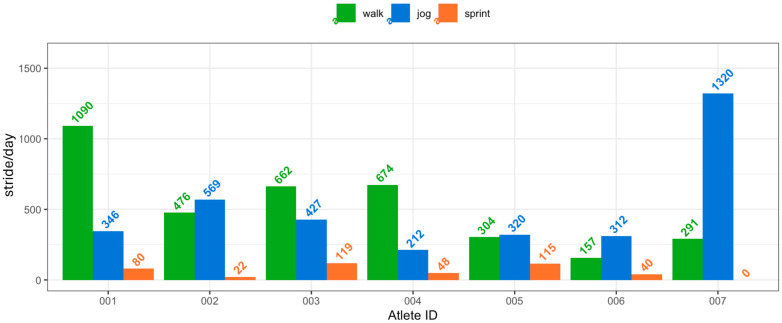 Figure 20
Figure 20- —Inail (Istituto Nazionale per l’Assicurazione Contro gli Infortuni sul Lavoro)
Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsProsthetics and Rehabilitation Robotics · Spinal Cord Injury Research · Context-Aware Activity Recognition Systems
1. Introduction
Sport therapy is a significant component in the rehabilitation of individuals who have suffered a limb amputation, thanks to its beneficial contributions to both their physical and psychological well-being [1,2,3]. This approach has gained significant traction since the pivotal works of the 1950s [4,5], inspiring some individuals to become professional athletes and many to adopt an active and participatory lifestyle. The Paralympic Games are now recognized as a major sporting event [6].
In this context, monitoring the activities of persons with amputations using sport-specific prostheses can support the assessment of health condition, evaluate training regimes, and optimize prostheses safety and effectiveness [7,8,9,10]. On this regard, the availability of long-term assessments can support the definition of standardized cyclic mechanical bench tests on sport-specific prosthesis sockets and running feet, which are currently lacking.
In recent years, the development of smaller, more precise sensors, such as Inertial Measurements Units (IMUs), has allowed for continuous monitoring over extended periods of time, leading to improvement in the sport analysis field [11,12]. Additionally, advances in machine learning led to new algorithms for pattern recognition [13]. Despite these advancements, the literature addressing the specific application of these tools on athletes with amputations remains extremely limited.
The application of IMU-based activity monitoring for able-bodied individuals is well-known [14,15]. However, existing algorithms may struggle in accommodating signal morphology induced by gait adaptations of prosthesis users, and signal variations specific to sports activities. While step-counting in walking has been widely studied in persons with amputations [16,17,18,19,20], it is only recently that studies on activity detection have become available [21,22,23,24,25,26]. However, most of these studies relied on the combination of both accelerometers and gyroscopes [24,25,26], limiting battery life [24,25,26], and involved only few participants with amputations in a sample of able-bodied individuals [21,24,25] or persons with powered/robotic prostheses [22,23]. Moreover, the goal of these studies was to detect whether the participant was standing, sitting, lying down or walking horizontally or up/down the stairs [21,22,23,24,25], while jogging and sprinting activities have never been part of the recognized pool of activities [21,22,23,24,25,26].
This study aimed to address these limitations by designing and validating an activity detection and stride counting algorithm using data from a single, low-sampling frequency triaxial accelerometer, for long-term activity monitoring of track-and-field and triathlon athletes with lower-limb amputations. Specifically, we hypothesized that a triaxial accelerometer sampling at 12.5 Hz could be matched with an algorithm reaching a high subject-specific accuracy, with the possibility to record up to 140 days. The solution was then applied to a pool of seven elite Paralympic athletes during the 40 days before the 2024 Paris Paralympic Games.
2. Materials and Methods
2.1. Participants
Eight elite athletes of the Italian Paralympic team (three females, five males; age: 29 ± 11 years; four with TT unilateral, three with TF unilateral, one with TT bilateral amputations–Table 1) were recruited and gave informed consent to participate prior to data collection. The study protocol was approved by the bioethical committee of the Department of Biomedical Sciences of the University of Padua (HEC-DSB/6-2024).
Exclusion criteria were the presence of painful neuromas on the distal end of the residual limb and cognitive impairments. Dropout criteria included the voluntary withdrawal of the subject, the loss of suitability to continue the experimental activities as evaluated by the principal investigator, device malfunctions, loss of medical clearance for sport practice and abandonment of sport practice.
2.2. Equipment
Accelerometric data were recorded with an Axivity AX6 (Axivity Ltd., Newcastle upon Tyne, UK), featuring a triaxial Micro-Electro-Mechanical System (MEMs) accelerometer: the device size is 23 × 32.5 × 8.9 mm, it weighs 11 g, is IP68 certified, and is equipped with an on-board non-volatile 1024 MB flash memory and a real-time quartz clock. The AX6 operates at selectable frequencies ranging from 12.5 Hz to 1600 Hz, with each increment doubling the previous frequency. For this study, AX6 was set to operate at 12.5 Hz and only triaxial accelerations were collected (accelerometer range: ±16 g). Based on the AX6 manual, this sensor configuration is suitable for about 140 days of continuous use [27].
In addition to the IMU, video recordings were used to serve as a reference for activity tracking and stride counting. Specifically, all videos were captured using a Panasonic JVC Everio (Kadoma, Osaka, Japan) hand-held camera, saving files in an uncompressed MKV format sampled at 25 Hz.
2.3. Software Implementation
All algorithms were implemented using Python 3.9.21 (Python Software Foundation, Wilmington, DE, USA), with Anaconda 2024.10 (Anaconda Inc., Austin, TX, USA) to manage dependencies and environments, and Spyder (community-developed) as an Integrated Development Environment. A specific environment was created, composed of the following libraries: NumPy, matplotlib, pandas, csv, cv2, tkinter, PIL, SciPy, sklearn, concurrent, seaborn, openpyxl, collections, decimal, PyWavelets, TensorFlow, datetime and math. Apps were developed, ensuring that there was no need for the user to interact with the script, only to interact with Graphical User Interfaces (GUIs), which were implemented using the functionalities of the tkinter library.
2.4. Definition of Activities and Motion Intervals
For this study, we defined four different activities to be categorized, identified and monitored, aimed at covering the main activities that an athlete may perform during a training session:
Stop: the athlete is either sitting or standing still, in general performing an activity that does not cause any relevant stress to the prosthetic device.Walk: the athlete is walking, with the presence of the double support phase during the gait cycle.Jog: for track-and-field athletes, this activity indicates the longer-distance lower-intensity running aimed at warming-up before a race.
For triathlon athletes, this activity includes all the running activities lacking the double support phase and is not limited to the warming-up.
4.Sprint: for track-and-field athletes, this activity indicates a trial where the athlete is starting from a still position and then runs with the aim to cover a predefined short straight distance, typically between 60 m and 100 m, as quickly as possible. The acceleration and deceleration phase are typically longer than the steady state velocity phase.
For triathlon athletes, this activity was not recorded, as it is not a usual part of their training regimes.
Moreover, we defined Motion Interval (MI) as a burst of the same activity with the following features:
- Stop: a time interval with a duration of at least 20 s;
- Walk and Jog: a time interval containing between 10 and 15 strides;
- Sprint: the time interval between the athlete’s start from a still position to maximum speed and initial deceleration.
2.5. Acquisition Protocol
A short-term session consisting of a typical training session was recorded for each athlete for the purpose of algorithm calibration and validation. This was followed by a long-term session of around 40 days prior to the 2024 Paralympic Games, to exploit the solution to monitor the activities of the athlete during a highly intense training period.
Specifically, during all sessions, one AX6 sensor was placed on the prosthesis. As a general guideline, it was positioned laterally on the socket for both TT and TF amputations, with one of the axes vertical to the ground when the subject was standing upright. However, some deviations were needed, depending on the athlete, since the socket shape is custom-made based on the conformation of the residual limb. Moreover, in selecting the sensor position, we excluded any obstruction of movement to the athletes or to the prosthetic knee, ensuring sensor stability relative to the socket by using double-sided tape. These criteria led to the development of a second possible configuration for TT amputations where the sensor is positioned on the proximal part (non-deformable) of the running prosthesis foot, resulting in about 10° of sensor inclination relative to the gravity vector while standing (Figure 1). For this study, this extra configuration was needed only for athlete 005.
During the short-term session, athletes were tracked with AX6 and the hand-held video camera during their typical individual training session (about 1–1.5 h) to record all the six activities defined in Section 2.4. Before the recordings, the camera operator identified a spot in the training facility to collect all videos, maintaining a distance of at least 10 m from the athlete. During recordings, the operator visually followed the athlete during training, using the camera zoom to allow for a clear identification of the activity and strides taken by the subject. The training sessions were altered as little as possible compared to standard practice, but ensuring the collection of sufficient signals for the identification of at least the following MIs for each athlete:
- Eight of Stop;
- Eight of Walk;
- Eight of Jog;
- Five of Sprint.
For long-term monitoring, each participant wore the AX6 positioned during the short-term session and kept it on the prosthesis during daily training sessions. The AX6 was removed before the competition to avoid possible infringements of the International Paralympic Committee regulations.
2.6. Algorithm Workflow
The task of activity monitoring and stride counting was addressed by first designing and implementing an algorithm for activity detection that segments the signal into MIs, followed by another algorithm for stride counting, to be applied within the same type of activity. The overall algorithm workflow is reported in Figure 2.
Hereinafter, a block numbered “B” within a figure “F”, will be referred to as “Block F.B”. IMU data from the short-term (Block 2.1) and the long-term (Block 2.11) acquisitions, together with the short-term video data (Block 2.2), are taken as an input to generate as output long-term labelled data with the corresponding activities (Block 2.14) and the total number of strides counted for each activity (Block 2.16).
The process can be divided into three main stages that are briefly described here and in more detail in the corresponding sections:
- Dataset Preparation (Section 2.7): this stage (Block 2.3) creates the labelled database used for calibration and performance evaluation. Specifically, the short-term MIs are manually labelled (Block 2.5) by the user based on video data, to obtain the ‘gold standard’ database (Block 2.6). This stage also contains a pre-processing step in which the axes of the IMU signals are re-oriented (Block 2.4) for consistency among athletes.
- Algorithm Calibration (Section 2.8): This stage (Block 2.7) calculates the parameters needed to calibrate the models for the specific subject. The main bulk of this stage is composed by the Monte Carlo Cross Validation (MCCV), which is a cycle with 50 iterations (Block 2.8) used to estimate the subject-specific thresholds (Block 2.9) and cadences (Block 2.10), together with the subject-specific estimation of the algorithm classification and counting errors.
- Algorithm Application (Section 2.9): This is the final stage (Block 2.12) of the procedure, where the algorithm is applied to the long-term data (Block 2.11). It is composed of two main blocks:
- Activity Detection Algorithm (Block 2.13): using the thresholds from Block 2.9, it performs an automatic identification of the activities on the long-term data, giving as an output the labelled long-term data (Block 2.14);
- Stride Counting Algorithm (Block 2.15): using the cadences from Block 2.10, it performs automatic counting of the total strides for each activity on the labelled long-term data (Block 2.14), giving as an output the number of strides performed over the whole acquisition for each kind of activity (Block 2.16).
2.7. Dataset Preparation
The dataset preparation process is described in detail in Figure 3.
The first step consists of reorienting the sensor axes (Block 3.3), as shown in Figure 4. Due to variations in sensor placement among different participants, straight comparison of accelerations across columns is highly misleading. To ensure comparability across subjects, raw accelerations were realigned to a standardized anatomical reference frame across subjects, while preserving the first column for the time step: the anterior–posterior (AP) axis was assigned to the second column, the caudal–cranial (CC) axis to the third, and the medio-lateral (ML) axis to the fourth column.
After the axis reorientation, the main block of the dataset preparation procedure is the labelling (Block 3.4). Considering the short-term session, the aim of the block was the creation of a database of MIs (Block 3.9), each tagged with the label indicating the activity and the number of strides, manually identified and counted based on the video recording used as gold standard. Specifically, every frame of the IMU data was paired with a frame of the video recordings aligning the time series (Block 3.5). To do so, the starting time of the IMU signal and of the video recordings were synchronized, based on the global timing collected by both measurement systems. The synchronization enabled the simultaneous visualization of IMU signals and video footage within a custom App, allowing the user to segment the signal into MIs (Block 3.6). Within each MI, the operator classified the activities (Block 3.7) and manually counted the number of strides (Block 3.8).
2.8. Algorithm Calibration
To obtain subject-specific thresholds and cadences to calibrate the activity detection algorithm and the stride counting algorithm, a stratified MCCV [28] was performed, taking as inputs the labelled dataset. The output of the MCCV is a new dataset, which is graphically summarized in Figure 5.
The MCCV block performed the random partitioning of the short-term labelled dataset into 50 training and testing sets. This approach allowed for the creation of multiple Training and Testing Datasets starting from a single database, expanding the dataset to make a subject-specific threshold estimation and providing information regarding the accuracy (error) of the algorithms in the detection of different sport activities at subject-specific levels.
Figure 6 reports a zoom-in on Figure 5, to describe the structure of the datasets generated at the n-th iteration of MCCV.
Specifically, at the n-th iteration of the MCCV, four MIs for Stop, Walk and Jog and two MIs for Sprint were randomly extracted and assigned to the corresponding iteration of the Train Dataset, while the remaining MIs (four for Stop, Walk and Jog and three for Sprint) were assigned to the Test Dataset. Each dataset was composed of the concatenation of all the MIs assigned to it, keeping all the MIs with the same activity adjacent. The order of the activities is the following and was kept constant for both train and test sets: Stop, Walk, Jog and Sprint. The MIs at the edges of each category of the Test Dataset were doubled and marked to be ignored during the testing analysis, as the transition from the activities would be sudden and unnatural and would generate an artificial error.
2.8.1. Activity Thresholds Estimation
To calibrate the activity detection algorithm for the specific subject, three thresholds must be identified. These thresholds were calculated for each n-th iteration of the MCCV and then stored. The procedure used to obtain the thresholds is based on the use of a 48-frame sliding window with an overlap of 24 frames, that scrolls through the Train Database finding a set of features for every 24 frames of signal. The whole procedure can be seen in Figure 7.
The two features used to discriminate the activities, namely CC_max and L_AP, are presented in Table 2 and were calculated based on analyses in the time and frequency domain. The selection of these features was inspired by the fact that higher intensity activities might differ both in terms of acceleration (amplitude) of the signal and in terms of its frequency.
The parameter CC_max is obtained from the time-domain analysis of the signal. It corresponds to the maximum amplitude on the CC axis and is calculated as follows:
where x is the acceleration value at the frame , with varying from 1 to 48, indicating the possible frames in a k-window. Using this process, a value for the parameter was obtained for every window.
The parameter L_AP is instead a result of the frequency domain analysis. For this analysis, every acceleration axis of every 48-frame window was subject to a Continuous Wavelet Transform (CWT). In particular, the Morlet Complex Wavelet (cmor1.0–0.5 from Python library PyWavelets) was used based on its effectiveness with oscillatory quasi-stationary signals, where 1.0 represents the bandwidth of the wavelet and 0.5 specifies its centre frequency. The formula used for the CWT is the following:
where
- x(t): input signal in time domain (accelerometer signal in AP axis, with a length of 48 frames);
- ψ(t): mother wavelet function;
- ψ*: complex conjugate of the mother wavelet;
- a: scale parameter (inversely proportional to frequency);
- b: translation (time shift) parameter.
The mother wavelet parameters were chosen to ensure a suitable balance between time and frequency localization for analyzing low-frequency components of accelerometer signals. The mother wavelet function was calculated as follows:
where
- : central frequency (related to the parameters ‘1.0–0.5’);
- : provides time localization;
- : sinusoidal oscillation for frequency localization.
After the wavelet transform of a window was calculated, the mean value of the 48 frames of the window was obtained for every frequency band. This gave, as a result, the mean behaviour of the wavelet transform inside the desired window. An example of this application can be observed in Figure 8.
The mean behaviour of the wavelet transform, considering a 48-frame window of a walking task recorded at 12.5 Hz, gives, as a result, a graph composed of two peaks: one between 0 Hz and 1 Hz, and one between 1 Hz and 4 Hz. The amplitude of these peaks depends on the intensity of the task and is a very strong and consistent discriminant for activity intensity. In particular, the value L_AP is the amplitude of the peak in the range of frequencies 0–1 Hz.
After the two features from every 48-frame window were extracted, a statistical analysis of their distributions was considered using boxplots to calculate the three thresholds assigned to the corresponding n-th iteration. In particular, the values of the thresholds were obtained based on the whiskers of the boxplots. The visual representation of the procedure is shown in Figure 9.
With these values, it was possible to determine three subject-specific thresholds (T1, T2, T3) used to discriminate between the four main activities with the following formula:
where act1 and act2 represent lower and higher intensity activities, respectively, with Stop, Walk, Jog and Sprint being the activities ranked in increasing intensity order. Specifically:
- T1 (Stop vs. Walk): determined starting from the upper whisker of Stop and the lower whisker of Walk of the CC_max;
- T2 (Walk vs. Jog): determined starting from the upper whisker of Walk and the lower whisker of Jog of the L_AP;
- T3 (Jog vs. Sprint): determined starting from the upper whisker of Jog and the lower whisker of Sprint of the L_AP.
For each n-th iteration of the MCCV, the three thresholds were stored in a specific database, as shown in Figure 10. The final subject-specific thresholds were obtained by calculating the mean value for each parameter across all 50 iterations.
2.8.2. Activity Detection Validation
The MCCV was also used to provide a set of outcome measures that describe the performances (error) of the algorithm at a subject-specific level. To do so, during each of the 50 iterations, the sliding window was applied to the corresponding Test Dataset. For every 48-frame window, the two features were extracted. Then, a binary decision tree (Figure 11) was used to assign an activity label to each 24-frame sub window using the thresholds estimated at the n-th iteration of the MCCV on the Training Dataset.
The binary decision tree architecture includes a combination of cascading and parallel decision-making blocks, enabling the flexible and hierarchical processing of sensor data. The detection sequence classified the activities sequentially: Stop (Block 11.3), Walk (Block 11.5), Jog and Sprint (Block 11.7) based on the thresholds described in Section 2.8.1.
This gives as a result an evaluation array, with the same length as the accelerometer signal, where every frame is assigned a “tag-value” corresponding to an activity: 1 for Stop, 2 for Walk, 3 for Jog and 4 for Sprint. Since every MI was previously labelled using the gold standard, by comparing it with the estimated activity class the performances of the algorithm are calculated: a gold standard array with the same structure as the evaluation array was saved during each iteration, and the two arrays were paired and saved in the database.
The performances of the classifier were tested with a set of well-established statistical metrics (Table 3): Precision, Recall, F1-score, Macro average, Weighted Average and Accuracy) [29]. The following definitions are formulated under the ‘one-vs.-all’ (OvA) evaluation strategy, where each class is treated as the positive class against all others.
In addition, a 4 × 4 confusion matrix was plotted to visualize the True Positives (TPs), True Negatives (TNs), False Negatives (FNs) and False Positives (FPs) for each activity of each athlete. To create this confusion matrix, for each athlete, the arrays containing the labels from the gold standard derived from the 50 iterations of the MCCV were vertically concatenated and the same procedure was executed for the labels predicted by the algorithm. The comparison between these two arrays was used to create the confusion matrix. The best possible outcome was 100% on the diagonal cells and 0% in the other, meaning that the predicted activity always corresponded to the actual ones.
2.8.3. Cadences Estimation
The stride counting algorithm was calibrated for each activity characterized by a cyclic pattern, with the stride considered the primary unit, i.e., Walk, Jog and Sprint. For Stop the No. of strides was automatically set to 0. Cadences were calculated using the Train Dataset from each of the 50 iterations of the MCCV and then stored. For each MI, the cadences were estimated using the following formula:
where No. of strides is the number of strides manually labelled in the MI (gold standard) and T is the interval time in minutes, calculated as follows:
where L is the number of frames of the MIs and Fs is the sampling rate (12.5 Hz). At the end of the 50 iterations, all the cadences were stored in a database (Figure 12), each associated with the corresponding n-th iteration, and the final subject-specific cadences for each activity were calculated as the mean values of the cadences of the 50 iterations.
2.8.4. Stride Counting Validation
The MCCV was also used to validate the stride counting algorithm. During each of the 50 iterations, the duration of each MI in the Test Dataset was extracted, and the number of strides in that MI was estimated by using the cadence estimated during the n-th-iteration of the Train Dataset:
where is the time (in minutes) of the current testing MI. Afterwards, the estimated number of strides was stored in the database, alongside the gold standard number of strides manually associated with the testing MI.
At the end of all the iterations, for each athlete and each activity, the total number of strides was obtained by summing the number of strides obtained in each iteration, in short, “detected strides”. The same procedure was repeated for the number of strides extracted from the gold standard, in short, “labelled strides”. The performances of the stride counting algorithm were obtained by calculating the relative error between the total number of labelled strides and the total number of detected strides.
To better categorize each activity, the minimum and maximum speed in km/h for each athlete and activity and mean ± standard deviation for the whole sample were estimated. Speed was assessed from video recordings of the different activities. The tracks contained clearly visible distance markers; by measuring the duration of the video segment in which the athlete traversed a predefined track section, speed was computed as the ratio between the covered distance and the elapsed time.
2.8.5. Overall Workflow Validation
The previous sections describe how the algorithms were evaluated separately, i.e., activity detection and stride counting. However, in the long-term application they are expected to be applied subsequently. Therefore, to evaluate the final error of the overall workflow, i.e., the subject-specific performance of the workflow, an extra validation procedure was added to the MCCV analysis.
For each athlete, in each of the 50 MCCV iterations, the number of strides was estimated (Section 2.8.4) within the MIs identified by the activity detection algorithm, using the cadence evaluated during the same iteration (Section 2.8.3). Afterwards, the relative error was estimated considering the number of estimated strides and the number of labelled strides.
2.9. Algorithm Application
Once the calibration procedure based on the short-term session is completed, the data from the long-term session can be analyzed using the two main algorithms, to obtain the training intensities performed by the athletes.
2.9.1. Activity Detection Algorithm
The activity detection algorithm was applied, taking as an input the non-labelled long-term session signal and providing the labelled signal as an output. A zoom in of the algorithm is shown in Figure 13.
The sliding window used in Section 2.8.1 was applied to the long-term signal (Block 14.7), obtaining the features for every 24-frame window, and using the same binary decision tree from Section 2.8.2 (Block 14.8), a label was assigned to each portion of the signal. As a result, this gave the long-term dataset labelled with a resolution of 2 s (Block 14.9), automatically dividing the signal into MIs, which are then saved with a time stamp indicating when they are being performed, giving us a representation of each training session.
2.9.2. Stride Counting Algorithm
The stride counting algorithm was applied, taking as an input the labelled long-term signal and giving as output the number of strides performed during the whole period of acquisition (Figure 14).
The execution time was derived from the duration of all the MIs associated with each activity (Block 15.7). Subsequently, the number of strides is computed across all the activities (Block 15.9), starting from the Cadence Estimation Block (Block 15.8).
The results were then analyzed to find the daily number of strides performed with the prosthetic device.
2.10. Inter-Subject Validation
All the methods described in Section 2.8 and Section 2.9 refer to the calibration, application and validation of the activity detection and stride counting algorithms to a single athlete. However, it is relevant to estimate the overall performance of the algorithm among athletes, i.e., to perform an inter-subject validation.
For the activity detection algorithm, the concatenated arrays created for each athlete with the estimated labels were taken and concatenated in a single array. The same procedure was performed for the corresponding gold standard labels. Using these two arrays, the same metrics described in Section 2.8.2 were calculated.
For the stride counting algorithm, the mean value of strides performed by each athlete was obtained, alongside the mean number of strides counted by the algorithm and the standard deviation (SD). Using these numbers, the same metrics described in Section 2.8.4 were calculated. Finally, for the overall workflow, the same procedure described for the stride counting algorithm was executed using the strides counted with the methods explained in Section 2.8.5.
3. Results
3.1. Activity Detection Algorithm
The subject-specific activity thresholds calculated by the MCCV are shown in Table 4. Figure 15 reports the variability of the activity thresholds for each athlete over the 50 iterations of the MCCV. The metrics of the algorithm performance are reported in Table 5. Figure 16 reports the confusion matrices that show the subject-specific performance of the algorithm, Figure 17 reports the confusion matrix regarding the inter-subject performance, and Figure 18 shows an example of the overall classification function of the algorithm: the procedure is applied to a series of four connected MIs, each representing a different activity, following the same intensity order of the MCCV. For athletes performing triathlon (007 and 008), the Sprint activity was not recorded, and it will be absent from both the tables and confusion matrices.
3.2. Stride Counting Algorithm
The reference cadences, calculated for each athlete as the means of the cadences obtained over 50 iterations of the MCCV, are shown in Table 6. The plots that show the cadence variability over the 50 iterations of the MCCV are reported in Figure 19. Table 7 shows the error percentage of the stride counting algorithm for each athlete, while the bottom row of the table shows the mean values indicating the inter-subject performance. Table 8 reports the speed values obtained for each athlete and activity.
3.3. Overall Workflow Performance
The performance of the full workflow is reported in Table 9, indicating the performances of the stride counting algorithm when applied on the activities labelled by the activity detection algorithm, comparing it to the number of strides contained within the gold standard using the MCCV procedure. The table shows the total strides considered to obtain the results and the relative error percentage. The table shows both the subject-specific performance and the inter-subject performance.
3.4. Long Term Analysis
The results of the long-term analysis performed on the signal gathered from around 40 days of data collection before the 2024 Paralympic Games are given in Table 10, and a visual representation of the mean number of daily strides performed by each athlete within each activity is reported in Figure 20. Athlete 007 is a triathlete and does not perform sprinting; therefore, results for this activity are not reported. Athlete 008 is not included in this analysis, as they did not participate in the Paralympic Games and were thus not monitored over the period considered for this study.
For all the athletes, the number of daily strides was calculated based on the days of actual use of the prosthetic device and includes only the activities performed with the prosthesis socket with the AX6 attached, which was also the one used for the competitions.
Table 11 reports the state of the battery after long-term monitoring when sensors were returned to the lab.
4. Discussion
This study aimed to design and validate an activity detection and a stride counting algorithm, using data from a single, low-sampling frequency triaxial accelerometer, for long-term activity monitoring of track-and-field and triathlon athletes with lower-limb amputations. The instrumentation, performance of each portion of the algorithm and the results of the long-term analysis will be commented on separately.
4.1. Instrumentation
AX6 managed to record all the athletes across the desired period, and the battery of all the devices was high enough to ensure that a longer monitoring period was available, ranging up to 6 months: on average, after 45 days of recording, the battery life was still in the 80% range. Some intersubject variations were observed in this regard that might be related to different training regimes and starting battery percentage. The routinary application of the sensors for long-term monitoring of Paralympic athletes will provide consolidated insight into the actual battery use.
Despite a simple approach based on the use of adhesive tape, no athlete lost their device during the monitoring period. To better address the variety of the weather conditions and the possibility of triathlon athletes swimming with the device, for future applications we may consider blocking AX6 connections with hydrophobic materials. To ensure better stability of the device, a custom-made case to be embedded on the socket could be developed. Alternatively, the size factor makes AX6 easy to embed inside the prosthetic sockets or in the prosthesis connecting modules (hollow tubes with diameter of 30 mm).
The AX6 sampling frequency was set to 12.5 Hz to accommodate for an extended recording time and considering that the step frequency of elite sprinters was reported to be up to 5.9 Hz [30], which supported our choice from the theoretical perspective for the purpose of activity detection and stride counting. However, other authors also reported low frequency of acceleration signals at the shank to be in the 3 Hz to 8 Hz range and high frequencies reaching 20 Hz even at moderate running speed. [31] Therefore, other analysis outside the specific purpose of activity detection and stride counting might not be possible with a frequency of 12.5 Hz.
4.2. Stratified Monte Carlo Cross Validation
The Stratified Monte Carlo Cross Validation (MCCV) [28] was selected to validate the algorithms, as it is a method already present in the literature to assess activity detection algorithms [32]. The decision to consider 50 test–train sets and to then perform a 50% train–test subdivision is a trade-off between accuracy and database size.
The algorithm was designed to classify all long-term data into four activities, namely Stop, Walk, Jog, Sprint. This choice was made because athletes use the prostheses on which the AX6 was attached only for competitions and training sessions regarding sprinting or triathlon, and the athletes do not wear the prosthesis during stretching and warm-up exercises performed on the floor. When an unusual activity for physical conditioning is performed with the prosthesis, it is classified by the algorithm as one of the four options. Future works might be intended to expand the range of possible recognized activity, to allow for a greater focus on some part of the physical preparation. However, this was not deemed necessary in this first study, since our focus was mostly on the activities inducing a cyclic loading of the running foot or of the socket.
The set of eight MIs of Stop, Walk and Jog and five for Sprint for each athlete was selected for two main reasons. Firstly, to define a viable protocol for the acquisition of short-term data that could fit well within a typical athlete training session. Secondly, to collect enough data to complete a subject-specific validation of the thresholds and cadences. It is relevant here to remark that our algorithm does not rely on inter-subject validation only but is capable of providing a subject-specific estimation of the algorithm errors, exploiting the short-term session and its division into balanced training and testing datasets. While the results suggest that the number of MIs that we selected for the training and testing datasets is adequate, future studies might concentrate on analyzing the consequences of overall shorter short-term sessions. Also, future studies might evaluate the impact on algorithm performances of a “leave-one-out approach” for subject-specific threshold estimation, which has the drawback of unbalancing the testing–training datasets, minimizing the data available for validation, but allows for more variance in the testing database size. Also, future efforts might address estimate inter-subject thresholds, i.e., valid for all athletes, with no need for subject-specific calibrations.
4.3. Activity Detection
The performances of this innovative algorithm are much better than the one achieved in the past on lower-limb prostheses users (90%) (LLPUs) [33] and are comparable to performances obtained with complicated and computationally demanding algorithms with gyroscope data on healthy individuals [21].
Specifically, our results show that the method has an overall accuracy of 98%, with the worst performing activity being Stop (with an overall accuracy of 96%) and the best-performing activity being Jog (with an overall accuracy of 99%). The only case where an athlete showed an activity performing below 90% is Walk for athlete 003, reaching an accuracy of 88%, while the best-performing athlete overall was athlete 008, showing an accuracy of 100% for each activity. The different sensor positioning needed for athlete 005 does not seem to influence the performance of the algorithm.
Binary decision tree algorithms based on triaxial accelerometer data for activity recognition have already been tested both on healthy populations [14,15] and on people with transtibial amputations [33,34]. However, the main innovation of this study is the possibility to distinguish activities with a sampling rate of just 12.5 Hz with an extremely high level of accuracy, whereas rates of at least 45 Hz to 100 Hz were previously required. The 12.5 Hz sampling rate leads to huge savings in terms of memory and battery drain, allowing for to data collection up to 6 months, when achieving a month of collection had previously been a challenge.
In particular, the use of the CWT, instead of the 1 Dimension–Continuous Wavelet Transform (1D-DCWT) as used by Sheng et al. [21], made it possible to obtain a classifier based only on accelerometer data (without using a gyroscope that would consume all the battery in a few hours), speeding up the processing time and lowering computational cost. The evaluation of the wavelet mean pattern, rather than the usage of the wavelet transform with other discriminating techniques (e.g., CNN, as used by Nedorubova et al. [35]), is where the innovation lies.
The decision to use the wavelet low peak amplitude in AP and the maximal acceleration amplitude in the CC direction came after a detailed review of many features. Specifically, for each axis we considered the mean of the absolute signal, the mean of the semi-rectified values, the signal energy, the root mean square and the maximal absolute value. For the signal as a whole, we considered its magnitude area and its norm. Our final choice guaranteed that the boxplots’ whiskers of two subsequent activities (in terms of increasing intensity) did not overlap: the upper whisker of the lower-intensity activity was always lower than the lower whisker of the higher-intensity activity. It was verified, on all participants’ dataset, that the wavelet low-frequency peak amplitude boxplots of Walk vs. Jog and Jog vs. Sprint did not overlap; the same was found with the maximal amplitude in the CS axis with Stop vs. Walk boxplots. Non-overlapping boxplots were fundamental to obtaining high level of accuracy in discriminating against different activities. In general, the combination of L_AP and CC_max allowed for the classification of the activities with the lowest amount of features needed, resulting in a simple binary decision tree and a faster signal analysis.
4.4. Stride Counting
A stride-counting rather than a more traditional step-counting method was chosen, because as this study was conducted mainly on unilateral prosthesis users, counting each time that the prosthesis touched the floor proved easier.
The errors found for the stride counting algorithm with respect to the gold standard are negligible compared to the more traditional step-counter methods based on higher sampling rates [36,37]. In summary, our study shows that all activities had a mean error inferior to 1% (0.34% for Walk, −0.14 for Jog and 0.05% for Sprint), with Jog being the most consistent (variance of 0.41) and Sprint being the least inconsistent (variance of 1.28).
The cadence values found for Walk are comparable to the values reported in the literature for people with TT and TF amputation (~100 and ~80 steps per minute, respectively, so ~50 and ~40 strides per minute) [38,39,40], even if these studies only considered an everyday prosthesis and not a running-specific prosthesis. Previous studies on running cadence on LLPUs have not been reported. It is known that walking cadence is typical for each healthy individual and maximal variations are lower than 2% [41]. As similar variations were found in this latter study on LLPUs, stride counting from typical cadence was considered a subject-specific reliable stride-counting method.
4.5. Overall Workflow Performances
Our study shows that all activities had a mean error comparable to 1% (1.16% for Walk, 0.61% for Jog and 1.47% for Sprint), with Jog being the most consistent (variance of 0.91) and Walk being the least consistent (variance of 3.04).
The stride-counting errors obtained from the combination of the activity detection and stride counting algorithms are comparable to a traditional step-counter on LLPUs populations.
4.6. Long Term Analysis
AX6 sensors were used to collect long-term data from the athletes in the 40 days before the 2024 Paris Paralympic Games. This period is associated with constant training and can possibly provide a worst-case estimation of cyclic loading of running feet and sockets and provide an overall picture of the athlete “habits” under stressful conditions.
As reported in Table 10, every athlete had different training habits. In general, the top-performing athletes (athlete 003 and 005) were also the ones with the most intense training regimes, respectively, with 119 and 115 Sprint strides performed daily. While both athletes have a TT amputation, the level of amputation itself did not seem to be a factor in the training regimes, considering that athlete 004 had much less intense training sessions despite having the same level of amputation, performing only 48 strides per day. Athlete 002 received confirmation of participation in the Paralympic Games at a late stage, and because of the uncertainty they were, in general, the one performing the least intense training sessions, with 22 Sprint strides daily, being instead the athlete performing the highest number of Jog strides per day, with a mean value of 569. Athlete 006 had some personal issues in the period prior to the Paralympic Games, and this influenced their training regimes, showing a small number of strides in each category (40 for Sprint and 312 for Jog). In general, the discipline seemed to be the biggest factor influencing the training regimes, as the only triathlete (athlete 007) showed a completely different training regime when compared to the ones performed by all other athletes, reaching a mean value of 1320 strides per day.
4.7. Limitations
This study presents some limitations that should be acknowledged. First, the sample size was relatively small and restricted to eight elite athletes from the Italian National team, all of whom were running-prosthesis users. The focus on an elite group of Paralympic athletes limits the generalizability of the findings to recreational athletes, users of prosthetic devices in other medical or rehabilitative scenarios or individuals using prosthesis of different models or from different manufacturers. Moreover, the limited availability of athletes for recording sessions resulted in a single acquisition session for most subjects, which may have contributed to a constrained dataset and an increased risk of overfitting.
The algorithms also require a short subject-specific calibration session. Although effective for subject-specific performance, this requirement may hinder scalability in clinical or commercial environments. The absence of a deeper analysis of inter-subject thresholds variation also represents an additional limitation. Furthermore, the low sampling rate, while advantageous for long-term monitoring, restricts the extraction of higher-resolution biomechanical features that could enhance activity characterization. Finally, a direct quantitative comparison with advanced machine learning–based methods (e.g., CNNs, LSTMs) is lacking and should be addressed in future works.
5. Conclusions
This study introduced and validated an innovative protocol for sport activity monitoring in Paralympic athletes with TT and TF amputations using running-specific prostheses. The outcome of the study revealed that triaxial accelerometer data with a low sampling rate (12.5 Hz) and CWT are sufficient to accurately classify sport activities (Stop, Walk, Jog and Sprint) in LLPUs, with an overall accuracy of 98%. This represents a significant advancement in the field, as the resulting reduction in data size and energy consumption enables long-term monitoring in real-world situations for LLPUs in training contexts, enabling a monitoring period that lasts up to 140 days.
In addition, the cadence-based stride-counting approach represents an innovative contribution and could offer valuable insights into the running and walking patterns of both LLPUs and able-bodied individuals, showing an overall stride-counting error inferior to 1% (0.34% for Walk, −0.14% for Jog and 0.05% for Sprint) despite the low sampling rate.
The combination of the activity detection and the stride counting algorithm lays the groundwork for more personalized, efficient, and minimally invasive activity monitoring solutions, showing a stride-counting error comparable to 1% (1.16% for Walk, 0.61% for Jog and 1.47% for Sprint).
Although this study focused on a small group of Paralympic athletes with TT and TF amputations (which is why MCCV and accuracy metrics were preferred to inferential statistics), the methodology could easily be extended to healthy populations, as control, and on a broader range of LLPUs. Accuracy metrics and Monte Carlo Cross Validation were instead used to assess the robustness and generalizability of the algorithm’s performance. With this study, the foundations for more personalized Paralympic training programmes are given, as the high level of accuracy of the algorithms provides useful metrics on the duration of sport activities and on the consequent prosthetic loads. For the same reasons, this approach could be particularly useful for monitoring prosthesis wear over time.
In the near future, we aim to use force platforms to measure the ground reaction forces for every athlete and activity, thus allowing for the definition of accurate load cycles, and apply them to the devices to more accurately evaluate their performances. We also aim at recording more sessions from the athletes in order to have a larger database and more accurately validate the algorithm. We are also planning to apply the procedure in the following years to monitor the performance of the athletes in preparation for the Paralympic Games of Los Angeles in 2028.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1Bragaru M. Dekker R. Geertzen J.H.B. Dijkstra P.U. Amputees and Sports: A Systematic Review Sports Med.20114172174010.2165/11590420-000000000-0000021846162 · doi ↗ · pubmed ↗
- 2Matthews D. Sukeik M. Haddad F. Return to sport following amputation J. Sports Med. Phys. Fit.20145448148625034549 · pubmed ↗
- 3Laferrier J.Z. Parente M. Felmlee D. Return to Sport, Exercise, and Recreation (SER) Following Amputation Curr. Phys. Med. Rehabil. Rep.20241211010.1007/s 40141-023-00425-3 · doi ↗
- 4Legg D. Paralympic Games: History and Legacy of a Global Movement Phys. Med. Rehabil. Clin. N. Am.20182941742510.1016/j.pmr.2018.01.00829627098 · doi ↗ · pubmed ↗
- 5Gold J.R. Gold M.M. Access for all: The rise of the Paralympic Games J. R. Soc. Promot. Health 200712713314110.1177/146642400707734817542426 · doi ↗ · pubmed ↗
- 6Herzog W. The Paris 2024 Olympic and Paralympic Games J. Sport Health Sci.20241371771810.1016/j.jshs.2024.06.00339147425 PMC 11336327 · doi ↗ · pubmed ↗
- 7Migliore G.L. Petrone N. Hobara H. Nagahara R. Miyashiro K. Costa G.F. Gri A. Cutti A.G. Innovative alignment of sprinting prostheses for persons with transfemoral amputation: Exploratory study on a gold medal Paralympic athlete Prosthet. Orthot. Int.202145465310.1177/030936462094691033834744 · doi ↗ · pubmed ↗
- 8Petrone N. Costa G. Foscan G. Gri A. Mazzanti L. Migliore G. Cutti A.G. Development of Instrumented Running Prosthetic Feet for the Collection of Track Loads on Elite Athletes Sensors 202020575810.3390/s 2020575833050513 PMC 7601311 · doi ↗ · pubmed ↗