Strong and Agile Wall-Climbing Robots Capable of Traversing Obstacles via Anisotropic Acoustic Adhesion
Kanglong Yuan, Jun Peng, Ao Qin, Wenwu Zhu, Yikun Liu, Jiliang Ma, Yusen Ma, Xuefeng Chen, G. Jeffrey Snyder

TL;DR
This paper introduces a small, agile climbing robot that uses sound-based adhesion to climb walls and ceilings, carrying a heavy payload while navigating complex environments.
Contribution
The novel contribution is the development of a compact climbing robot using anisotropic acoustic adhesion for strong normal adhesion and minimal tangential resistance.
Findings
The robot can climb vertical and inverted surfaces at 70 mm/s while carrying a 70-g payload.
Acoustic adhesion is achieved through a vibrating flexible disk that creates a thin air layer with negative pressure.
The robot demonstrates agile mobility in 3D mazes and retired aircraft engines for damage inspection.
Abstract
Small inspection robots are highly desirable for inspecting complex machinery and detecting damage in confined spaces. However, common climbing robots that rely on vacuum suction or bioinspired dry adhesion often suffer from bulky sizes or slow locomotion speeds. Developing compact yet intelligent wall-climbing robots that mimic the agility and payload capacity of geckos remains an important challenge. In this work, we design a 20-g, 10-cm artificial intelligence (AI)-integrated robot capable of carrying a 70-g payload while climbing on vertical and inverted surfaces at a speed of 70 mm/s. Acoustic adhesion is generated by vibrating a flexible annular disk on smooth surfaces, where air is periodically absorbed and expelled, resulting in negative pressure. The thin air layer with negative pressure indicates anisotropic performance, characterized by strong normal adhesion and negligible…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
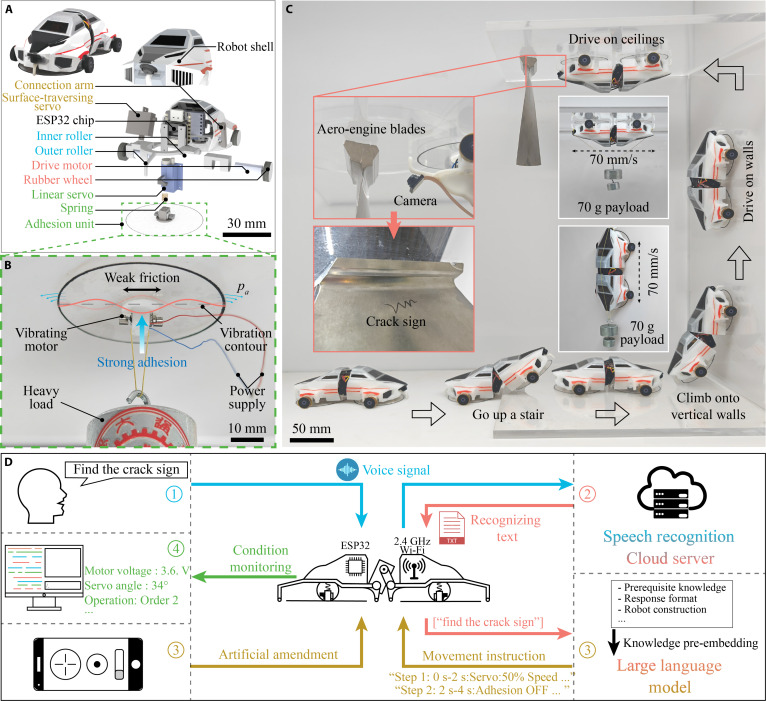 Figure 1
Figure 1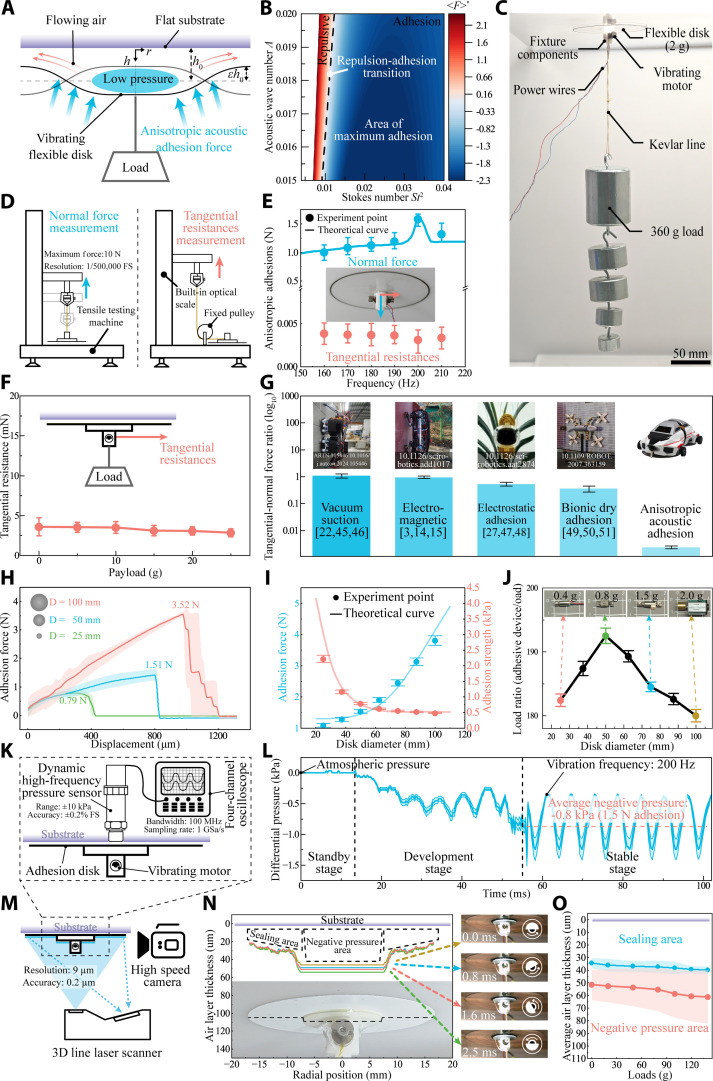 Figure 2
Figure 2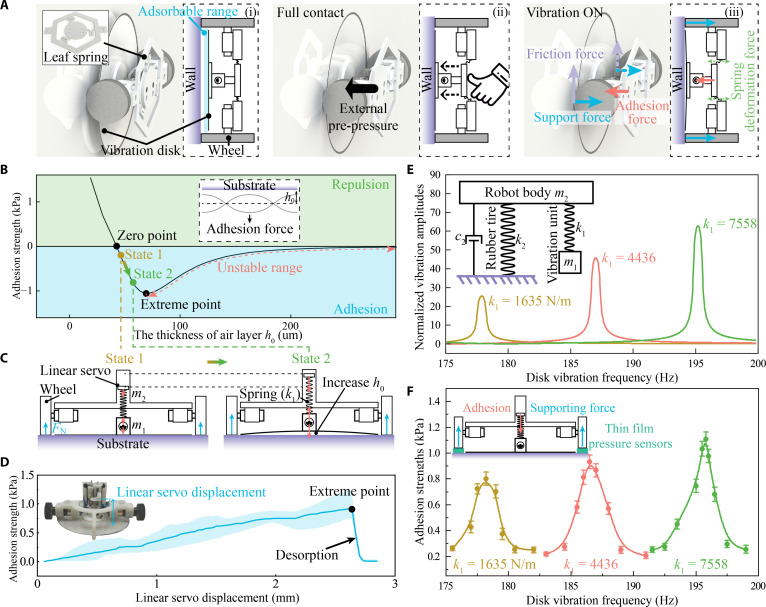 Figure 3
Figure 3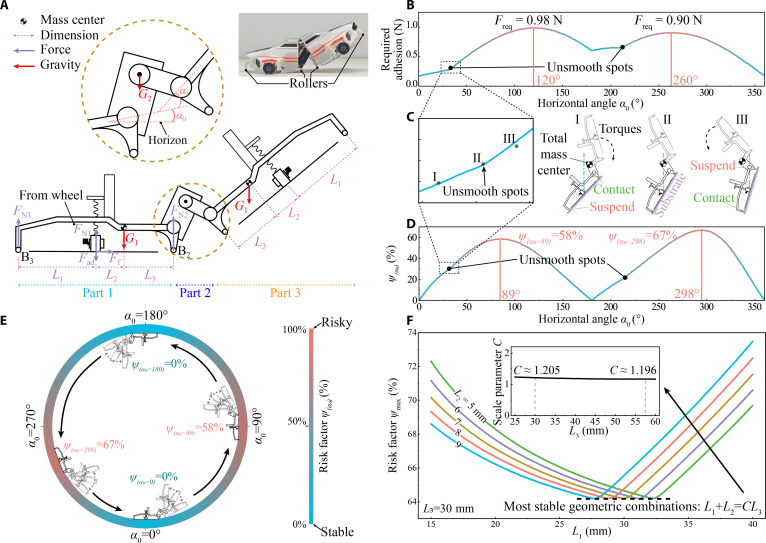 Figure 4
Figure 4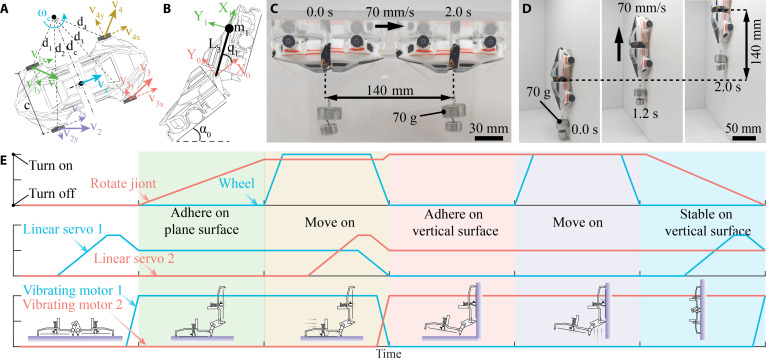 Figure 5
Figure 5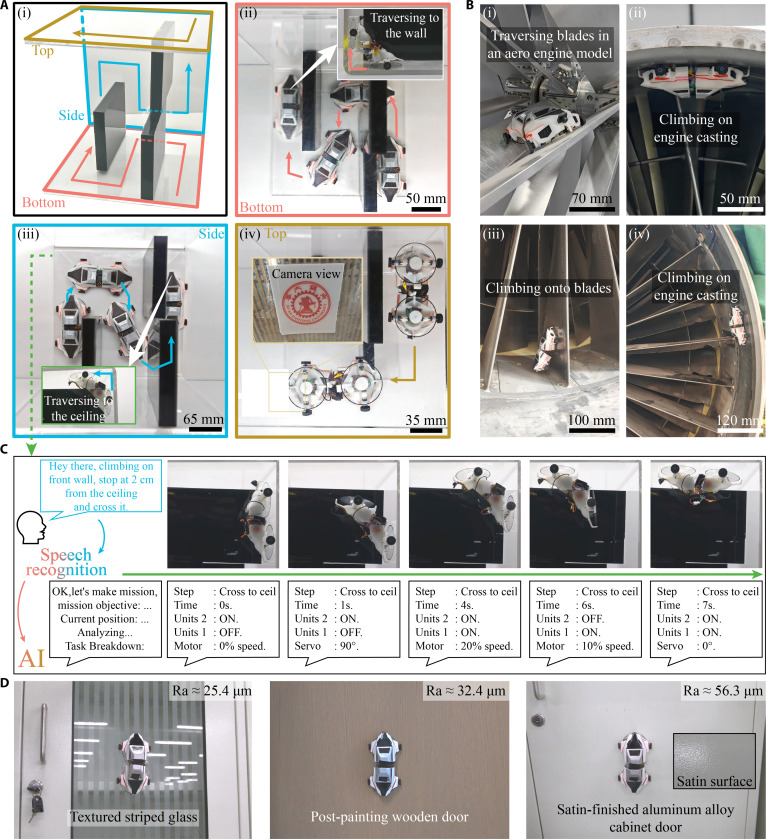 Figure 6
Figure 6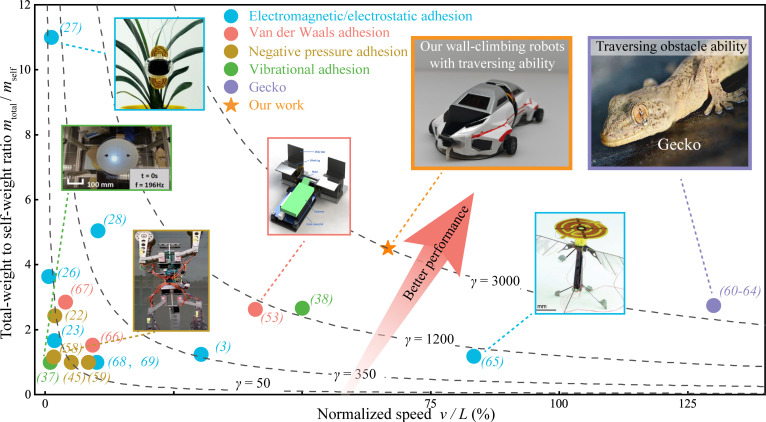 Figure 7
Figure 7Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsSoft Robotics and Applications · Adhesion, Friction, and Surface Interactions · Advanced Materials and Mechanics