A hybrid approach for real-time hand tracking using fiducial markers and inertial sensors
Ranjeet Bidwe, Shubhangi Deokar, Yash Parkhi, Tanisha Vyas, Nimita Jestin, Utkarsh Kumar, Satviki Budhia, Armaan Jeswani

TL;DR
This paper introduces a hybrid hand-tracking system using markers and sensors for accurate, real-time gesture recognition in immersive environments.
Contribution
A novel hybrid hand-tracking system combining fiducial markers, capacitive touch, and inertial sensors for real-time gesture recognition.
Findings
The system achieved 3.4 mm localization accuracy and 85–91% orientation accuracy.
Capacitive sensing provided 96.1% accuracy in finger-state recognition.
BLE and Wi-Fi communication achieved high reliability and low latency for real-time applications.
Abstract
This paper presents a cost-effective hybrid hand-tracking technique that integrates fiducial marker detection, capacitive touch sensing, and inertial measurement for real-time gesture recognition in immersive environments. The system is implemented on lightweight hardware comprising a Raspberry Pi Zero 2 W and an ESP32, with OpenCV’s ArUco marker detection enabling 3D hand pose estimation, capacitive sensors supporting finger-state recognition, and an Inertial Measurement Unit (IMU) providing orientation tracking. Optimizations such as exposure adjustment and region-of-interest processing ensure robust marker detection under variable illumination, while sensor data is transmitted via Bluetooth Low Energy (BLE) and WebSocket protocols for synchronization with external devices. The methodological novelty of this work is highlighted as follows: •High Accuracy Across Modalities: Achieved…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
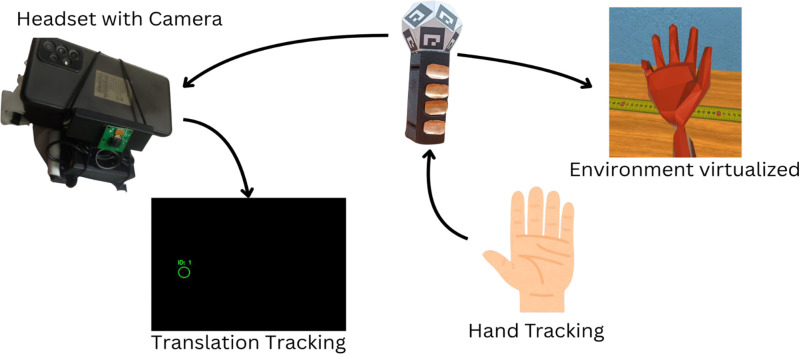 Figure 1
Figure 1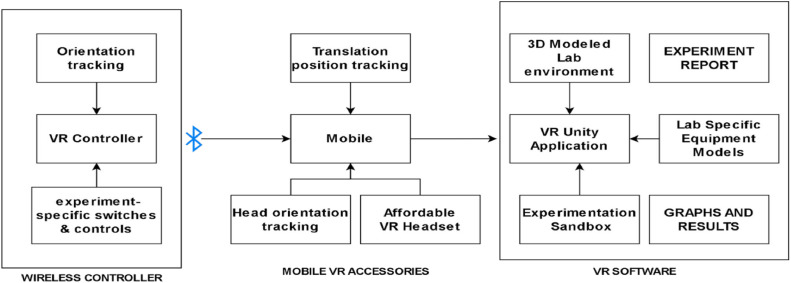 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4 Figure 5
Figure 5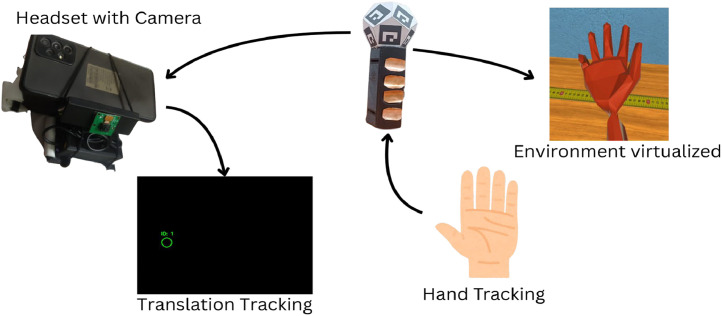 Figure 6
Figure 6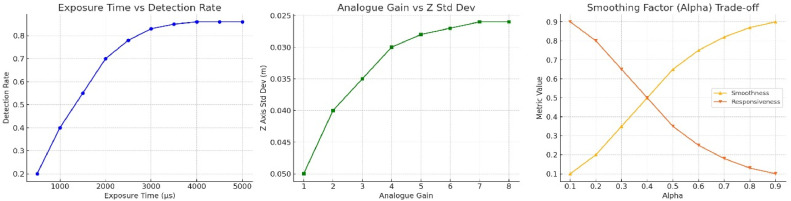 Figure 7
Figure 7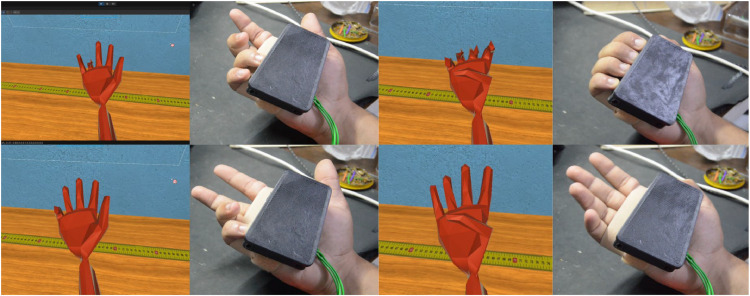 Figure 8
Figure 8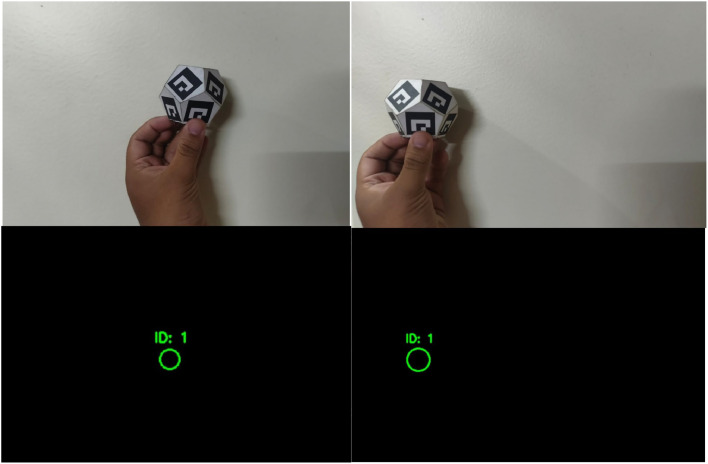 Figure 9
Figure 9 Figure 10
Figure 10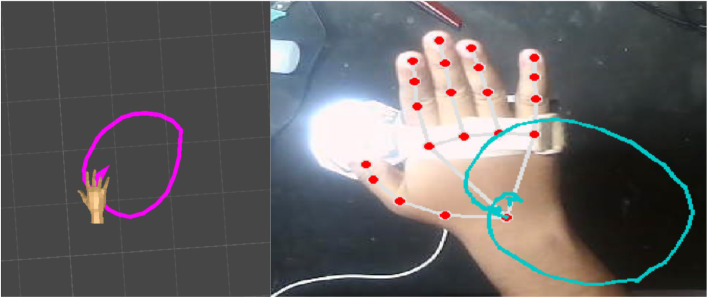 Figure 11
Figure 11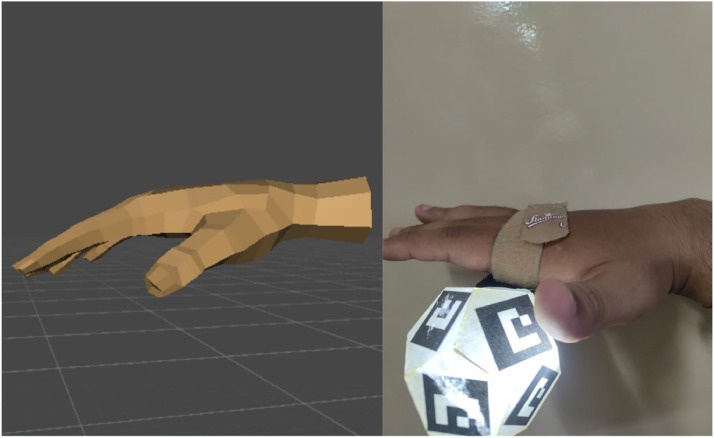 Figure 12
Figure 12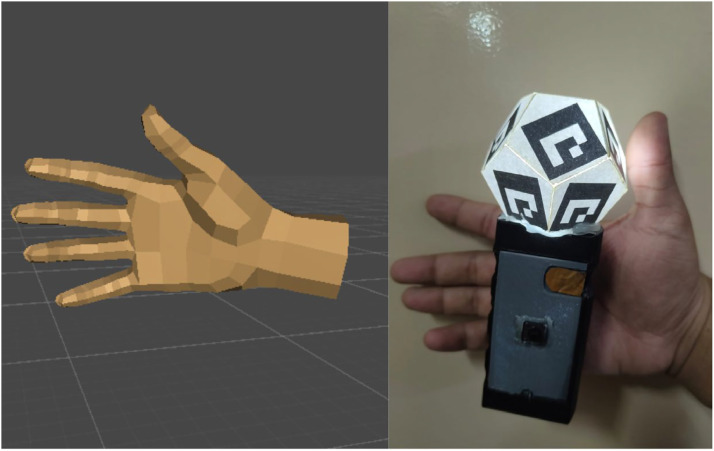 Figure 13
Figure 13Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsHand Gesture Recognition Systems · Video Surveillance and Tracking Methods · Video Analysis and Summarization