Longitudinal Model Identification and Controller Design for a Fish Robot with Control Fins via Experiments
Daewook Kim, Jinyou Kim, Changyong Oh, Taesam Kang

TL;DR
This paper develops a control system for a fish robot using experimental models to manage its movement and stability in water.
Contribution
The novelty lies in deriving input-output models and designing PID controllers for a complex, nonlinear fish robot system through experiments.
Findings
Surge velocity models showed high agreement rates of 75.25% and 81.23% at 0.2 m/s and 0.4 m/s, respectively.
Pitch angle models had lower agreement rates of 68.02% and 34.24% at 0.2 m/s and 0.4 m/s, respectively.
Pitch angle responses converged to 0° with oscillations in both simulations and experiments.
Abstract
This paper presents an experimental longitudinal mode control approach for a biomimetic underwater robot. Input–output models for surge velocity and pitch angle were derived through experiments, considering the fish robot body with servo motors and control pins as a single system to solve the problem of fish robots, which are complex and nonlinear, and also contain uncertainty. Closed-loop control systems were designed using PID controllers based on these models, and their performance was verified through simulations and experiments. Surge velocity and pitch angle response models were developed for nominal surge velocities of 0.2 m/s and 0.4 m/s. The surge velocity response models exhibited high agreement rates of 75.25% and 81.23% between the identified linear models and experimental results at 0.2 m/s and 0.4 m/s, respectively. In contrast, the pitch angle response model showed lower…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
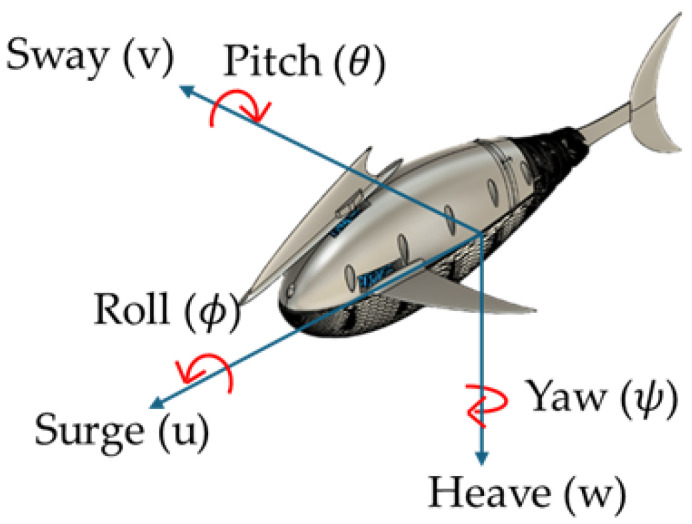 Figure 1
Figure 1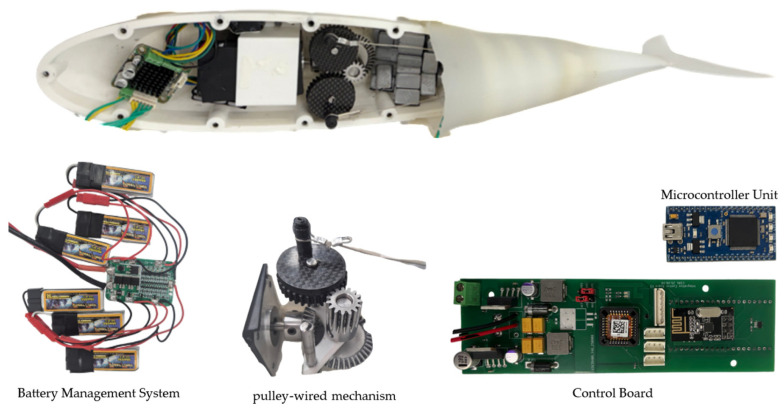 Figure 2
Figure 2 Figure 3
Figure 3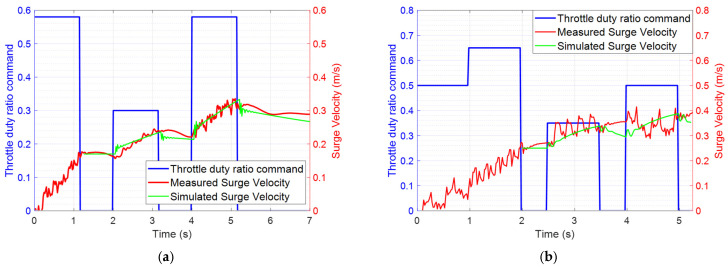 Figure 4
Figure 4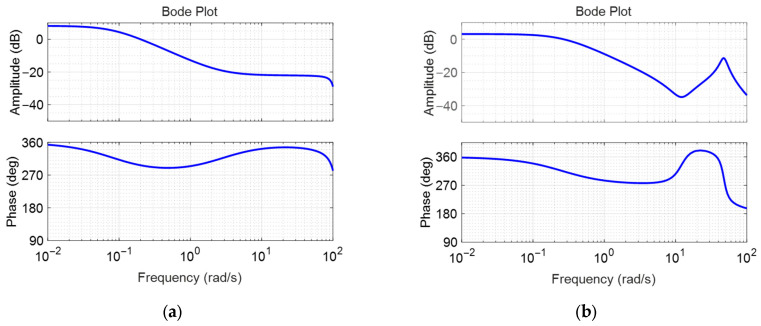 Figure 5
Figure 5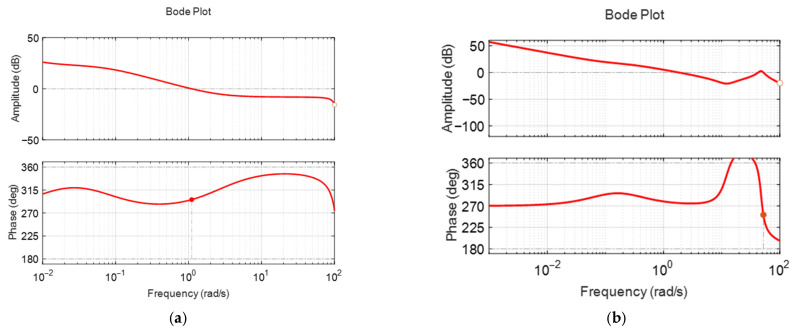 Figure 6
Figure 6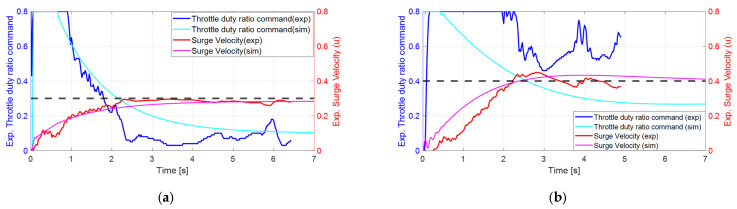 Figure 7
Figure 7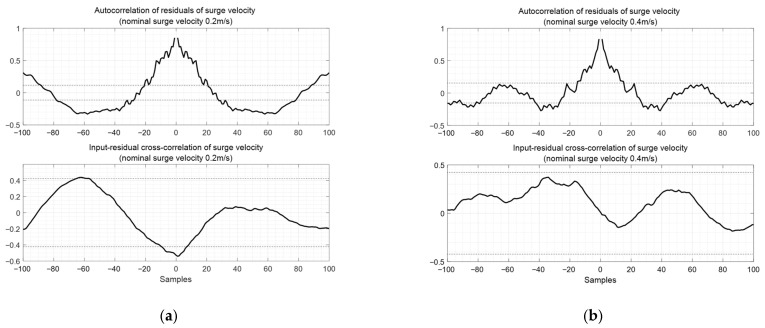 Figure 8
Figure 8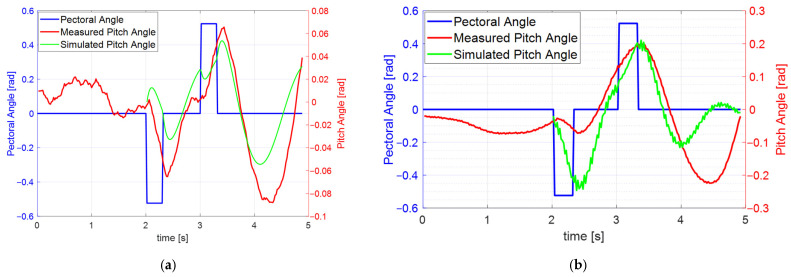 Figure 9
Figure 9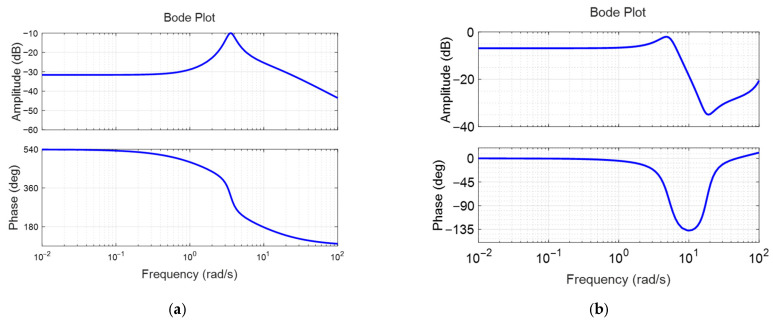 Figure 10
Figure 10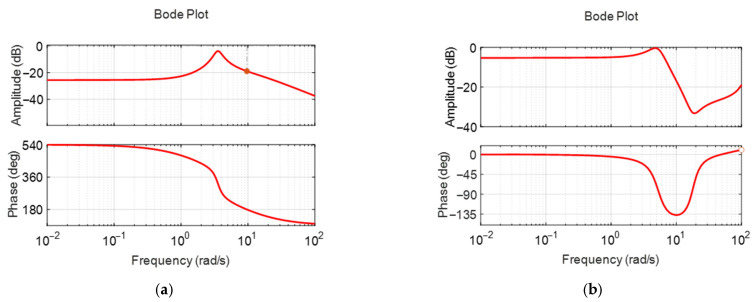 Figure 11
Figure 11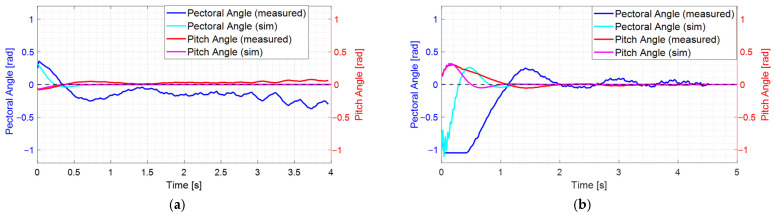 Figure 12
Figure 12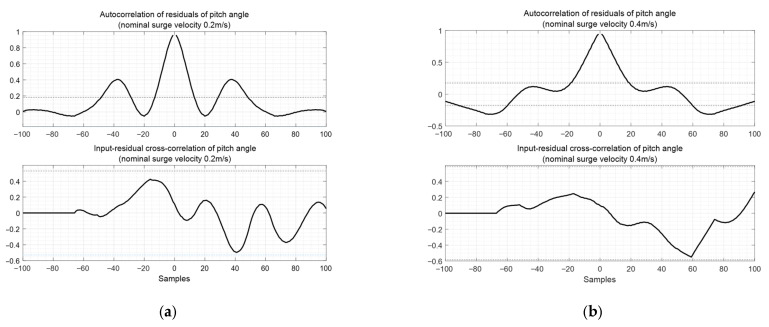 Figure 13
Figure 13Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsBiomimetic flight and propulsion mechanisms · Zebrafish Biomedical Research Applications · Water Quality Monitoring Technologies