Biomimetic Digital Twin of Future Embodied Internet for Advancing Autonomous Vehicles and Robots
Ming Xie, Xiaohui Wang

TL;DR
This paper introduces a new framework for simplifying communication in robotic systems, validated with an autonomous surface vehicle.
Contribution
The novel DigitalTwinPort framework offers a lightweight, middleware-independent solution for inter-module communication in autonomous systems.
Findings
DigitalTwinPort reduces configuration overhead and simplifies distributed system development.
The framework enhances synchronization between digital and physical components in autonomous systems.
Validation on an autonomous surface vehicle shows its effectiveness in real-world applications.
Abstract
Efficient coordination among software modules is essential for biomimetic robotic systems, much like the interaction among organs in a biological organism. However, implementing inter-process or inter-module communication in autonomous systems remains a complex and time-consuming task, particularly for new researchers. Simplifying inter-module communication is the central focus of this study. To address this challenge, we propose the DigitalTwinPort framework, a novel communication abstraction inspired by the port-based connectivity of embedded hardware systems. Unlike middleware-dependent solutions such as ROS, the proposed framework provides a lightweight, object-oriented structure that enables unified and scalable communication between software modules and networked devices. The concept is implemented in C++ and validated through an autonomous surface vehicle (ASV) developed for the…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
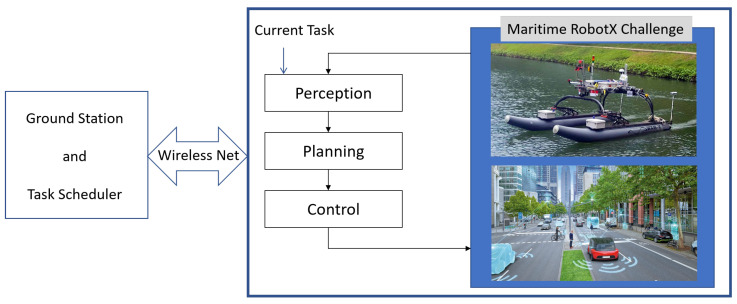 Figure 1
Figure 1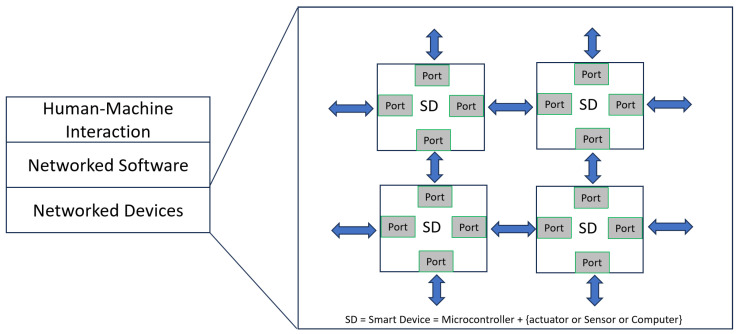 Figure 2
Figure 2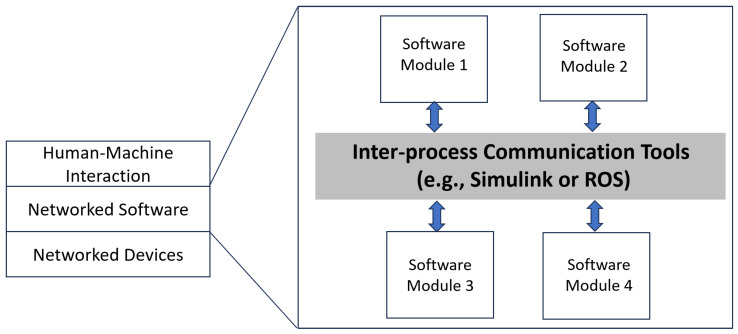 Figure 3
Figure 3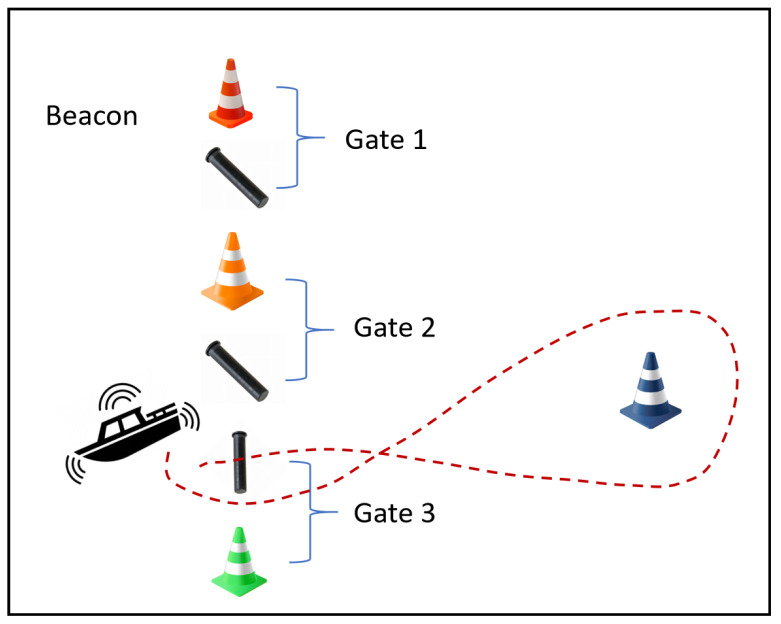 Figure 4
Figure 4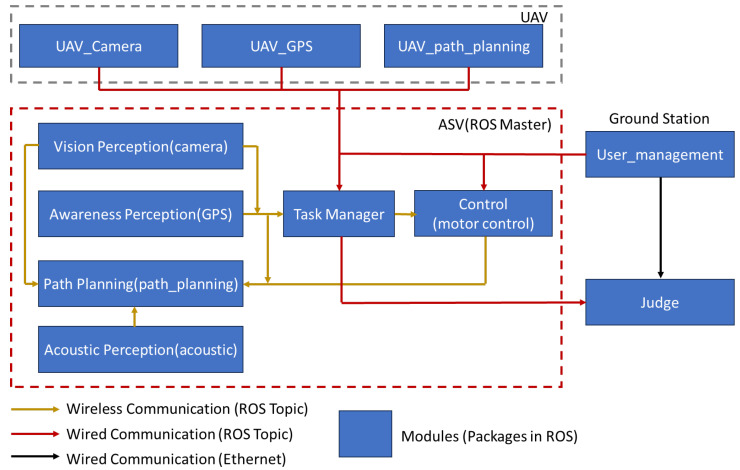 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8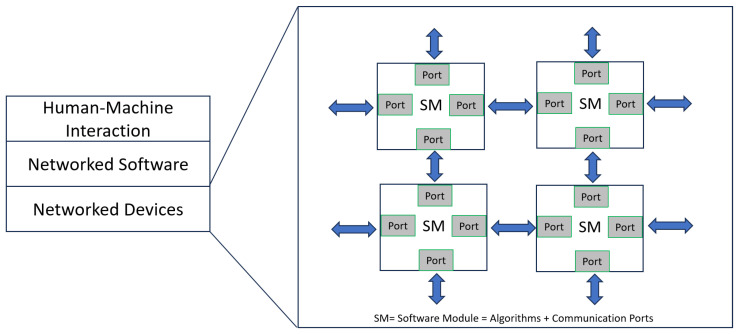 Figure 9
Figure 9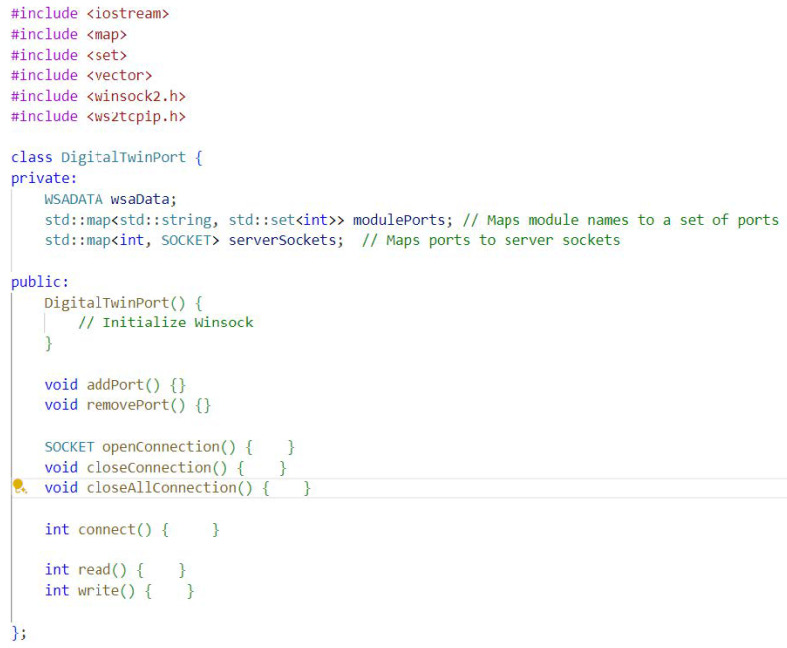 Figure 10
Figure 10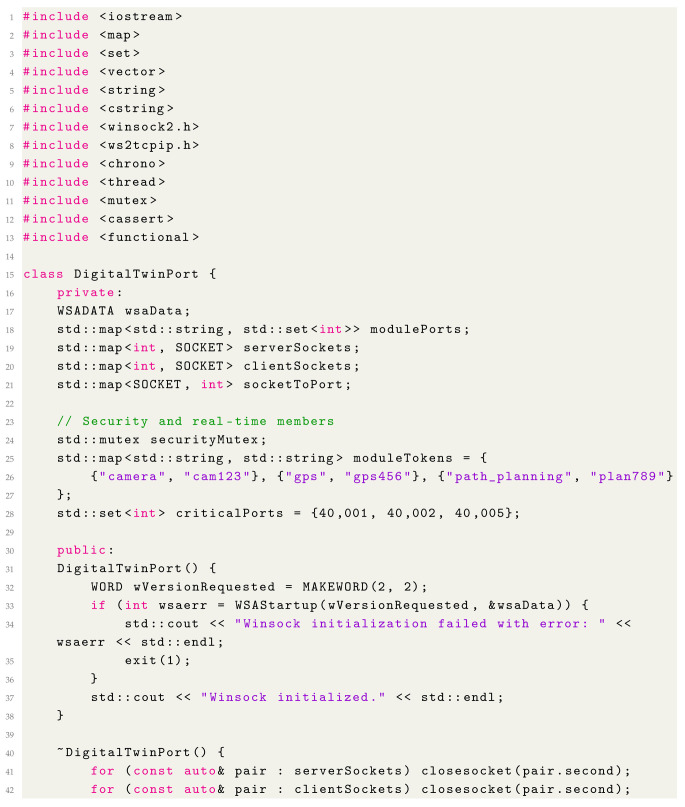 Figure 11
Figure 11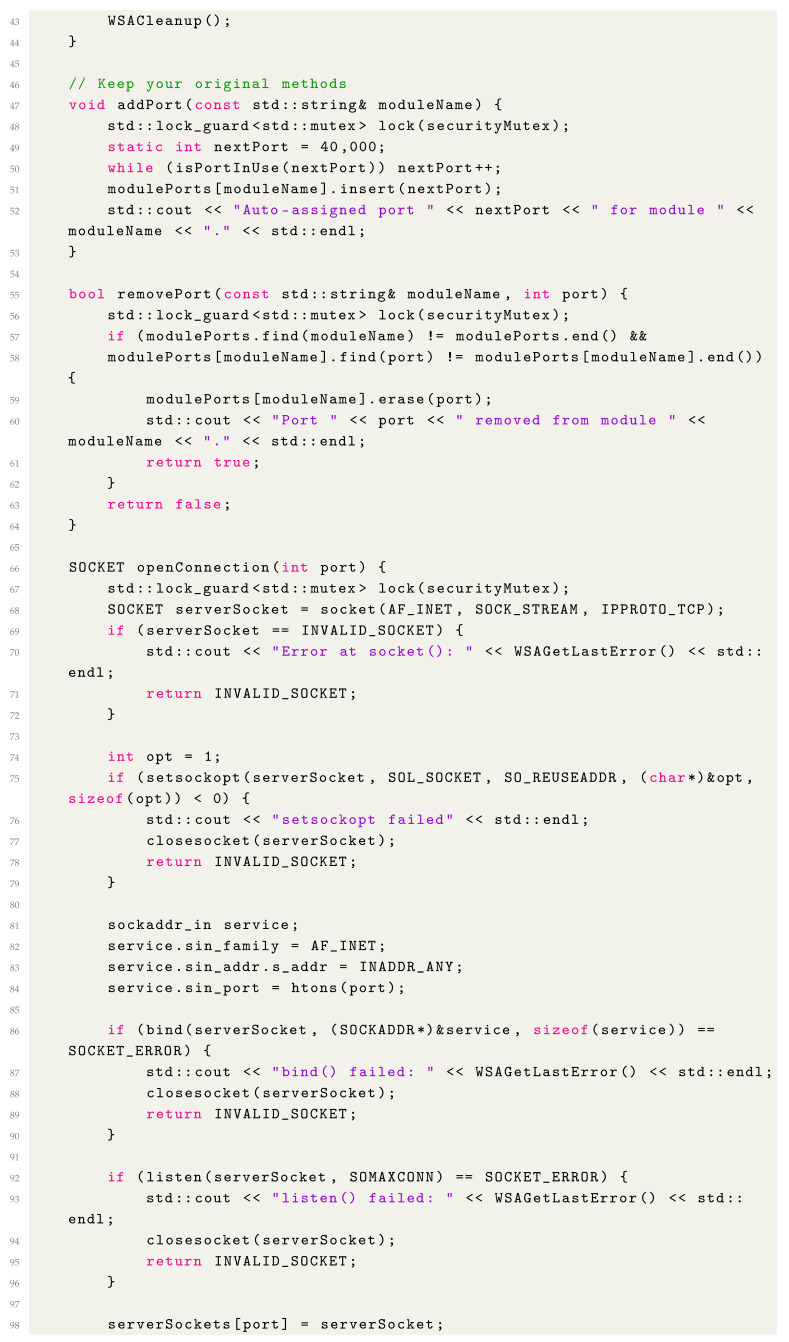 Figure 12
Figure 12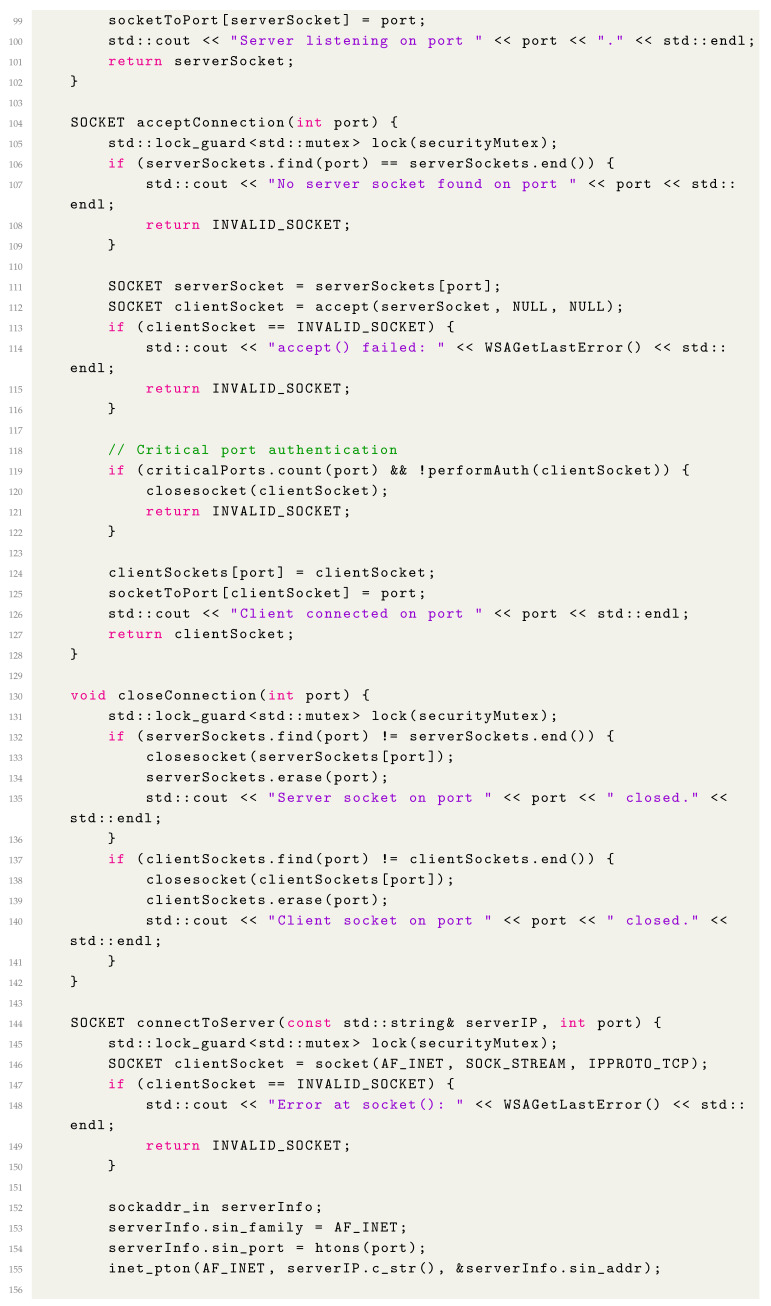 Figure 13
Figure 13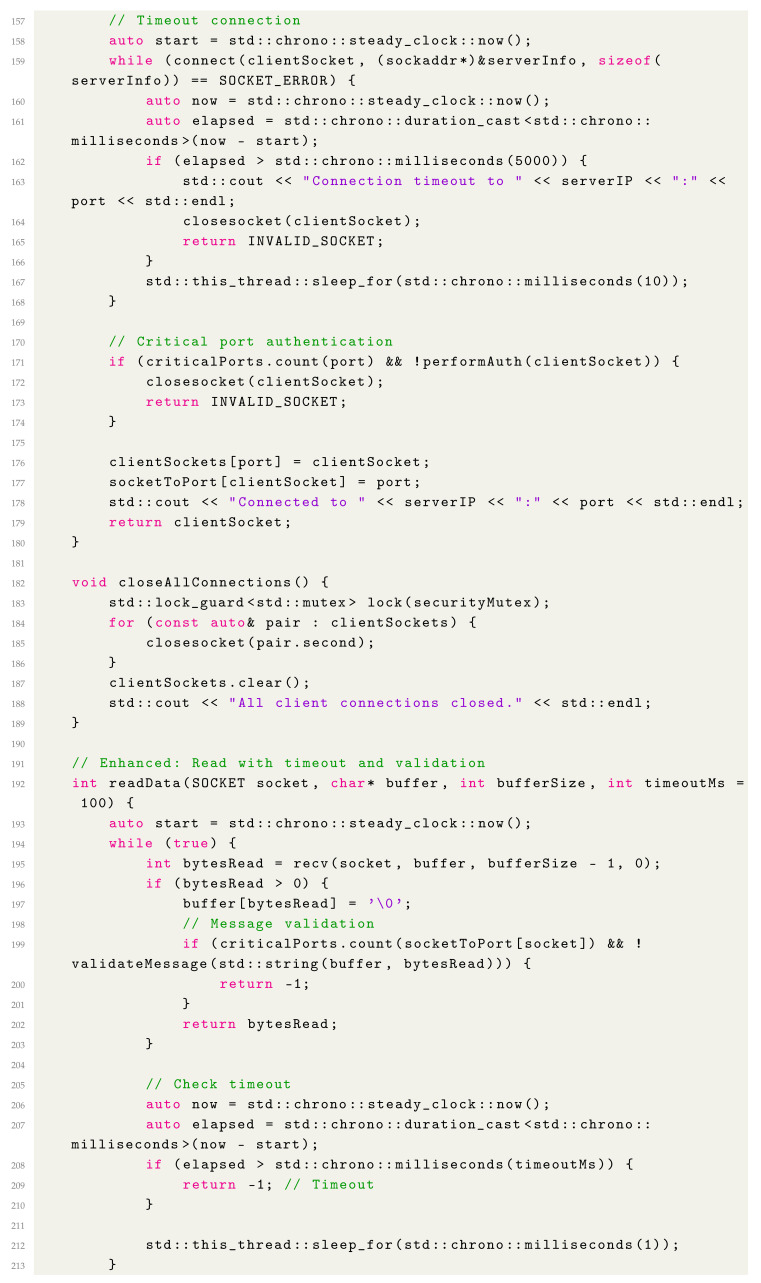 Figure 14
Figure 14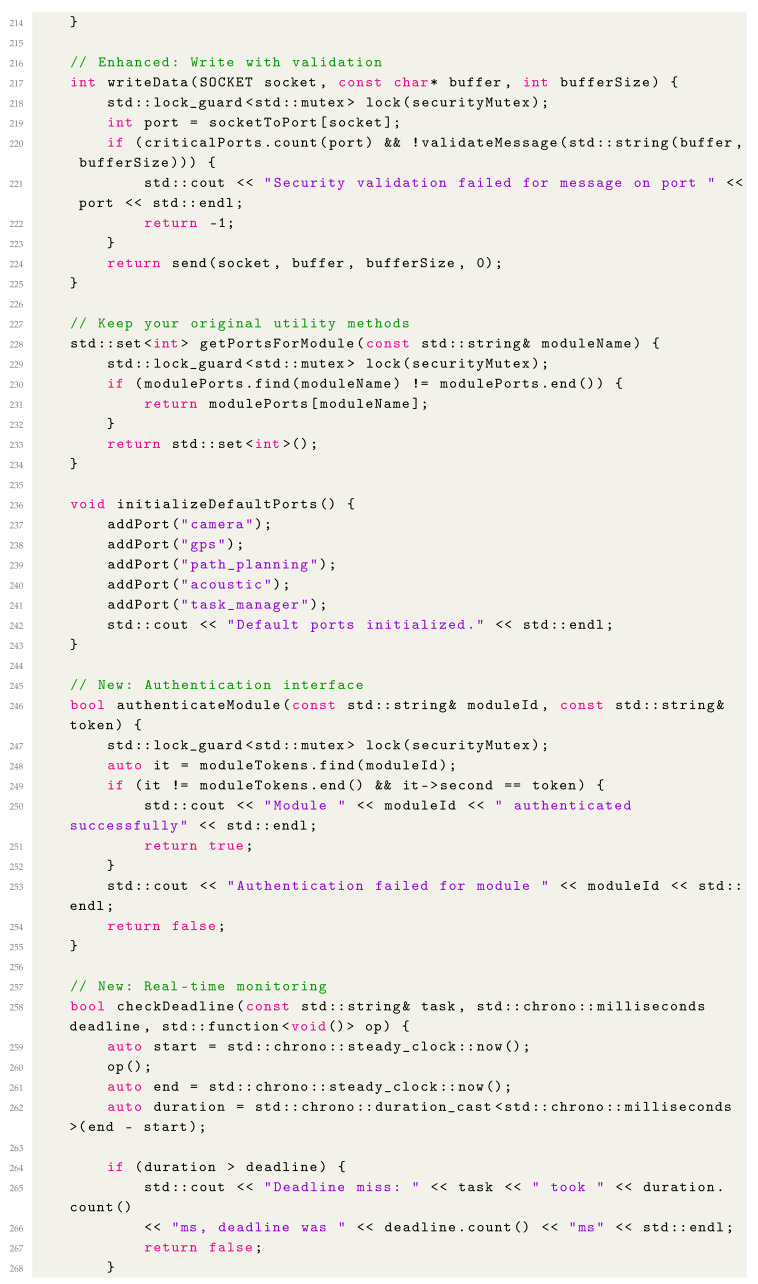 Figure 15
Figure 15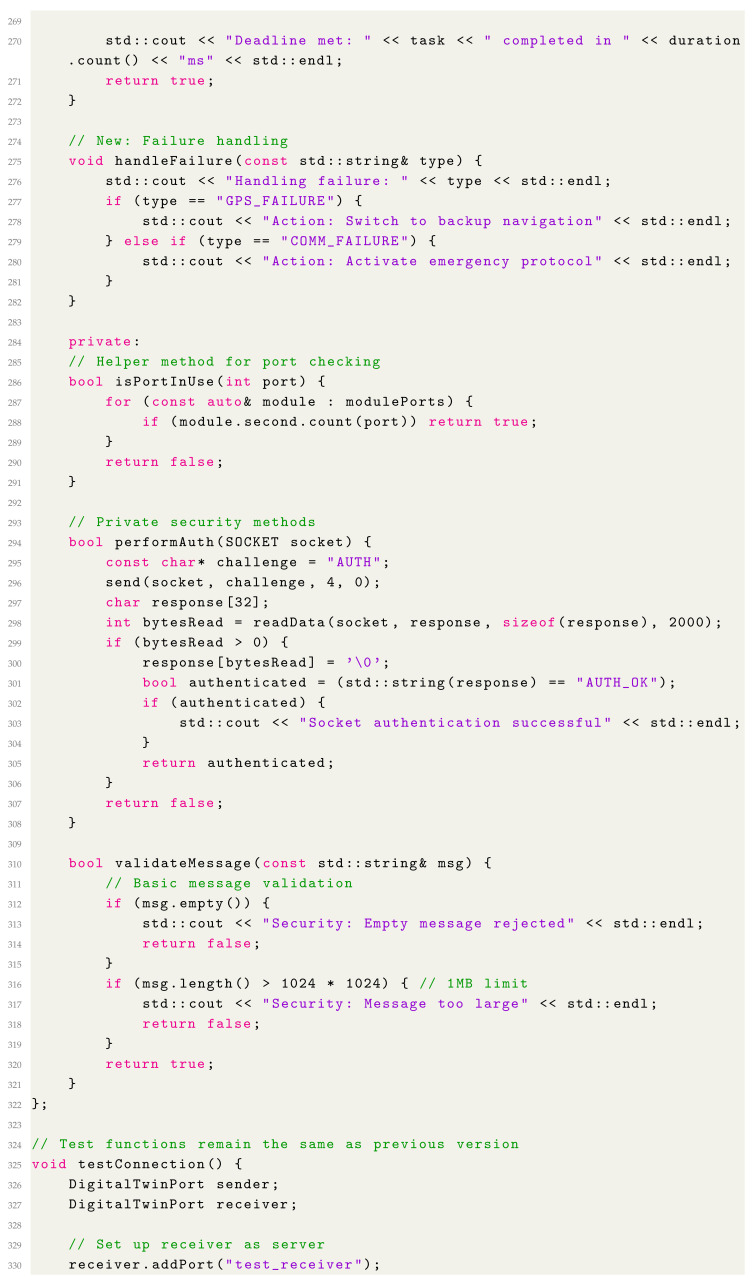 Figure 16
Figure 16 Figure 17
Figure 17 Figure 18
Figure 18Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsModular Robots and Swarm Intelligence · Embedded Systems Design Techniques · Robotics and Automated Systems