Aspects Concerning Parallel Robots Used in Rehabilitation
Adrian Todor, Daniel Vasile Banyai, Cornel Brisan, Adriana Daniela Banyai

TL;DR
This paper compares four parallel robot designs for rehabilitation, focusing on their precision and adaptability for upper and lower limb therapy.
Contribution
A simulation-based comparative analysis using the Analytic Hierarchy Process to determine optimal parallel robot designs for rehabilitation.
Findings
Parallel robots offer precision and rigidity suitable for adaptive rehabilitation therapy.
Structural differences in joints significantly affect performance and stability.
The Analytic Hierarchy Process identifies the most suitable design based on performance criteria.
Abstract
This study presents a comprehensive simulation-based comparative analysis of four parallel robotic mechanisms, each developed to assist patient recovery through adaptive movement control and feedback, particularly for upper and lower limb therapy. Kinematic and dynamic models were developed and implemented in Matlab-Simulink, integrating force control via conventional regulators and real-time interaction with simulated patient-applied forces. The structural differences between spherical, rotational, and universal joints in each kinematic chain variant were evaluated. To systematically determine the most suitable design, a detailed Analytic Hierarchy Process was applied considering performance, precision, stability, and actuator effort. The study emphasizes the advantages of parallel robots in rehabilitation due to their precision, rigidity, and compact design, highlighting the potential…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
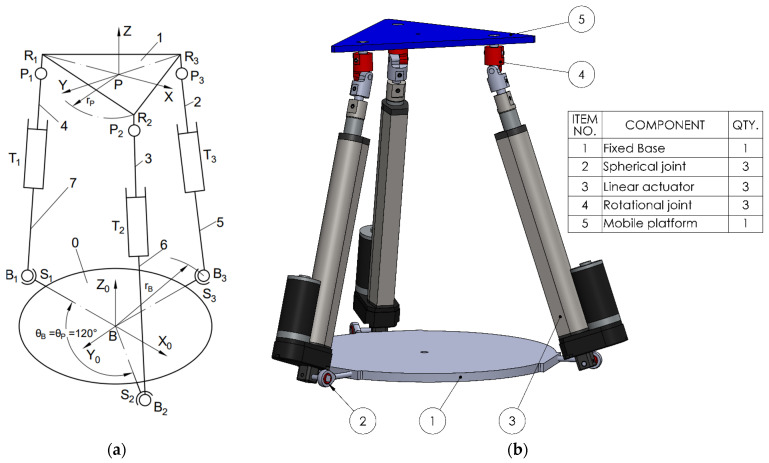 Figure 1
Figure 1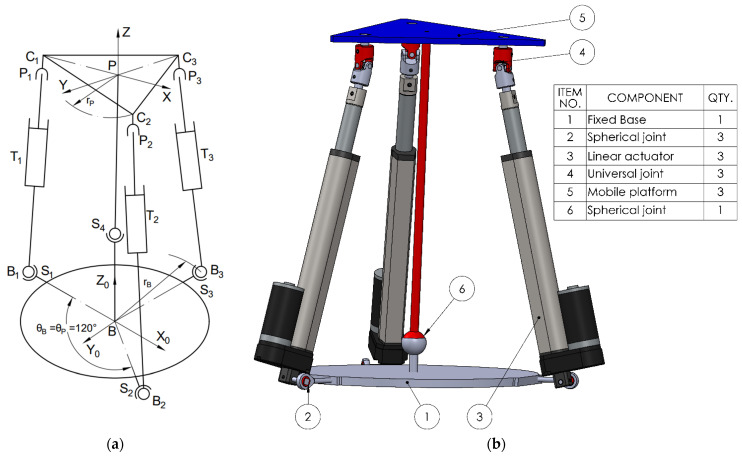 Figure 2
Figure 2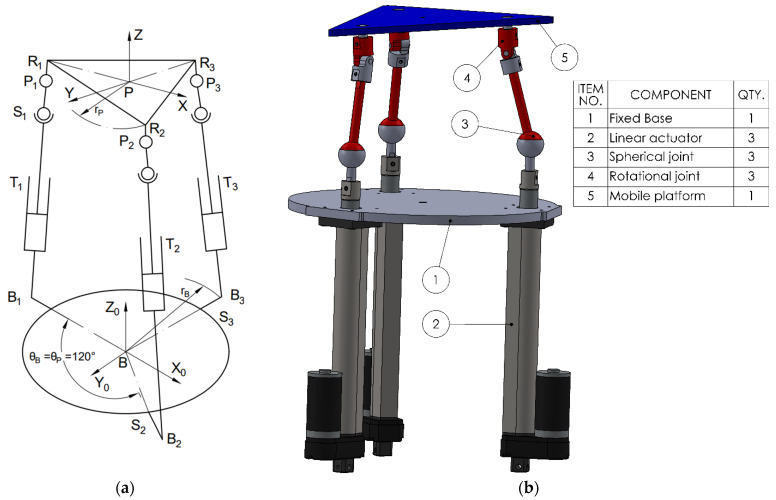 Figure 3
Figure 3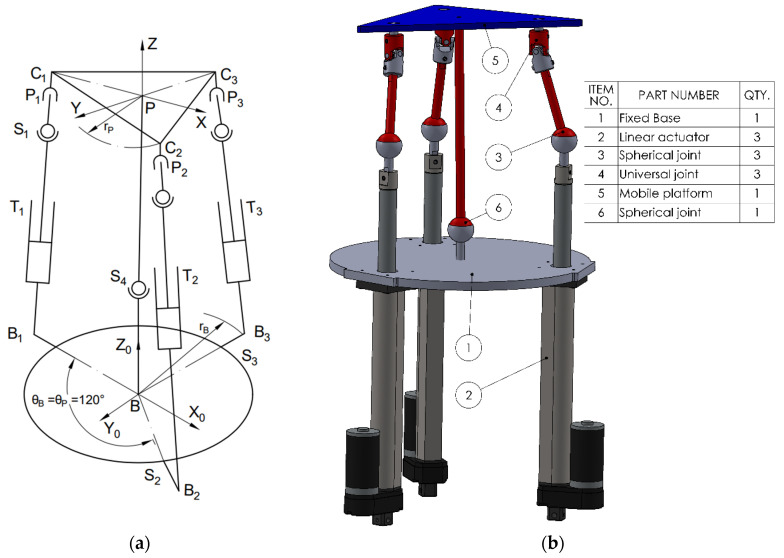 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13 Figure 14
Figure 14 Figure 15
Figure 15 Figure 16
Figure 16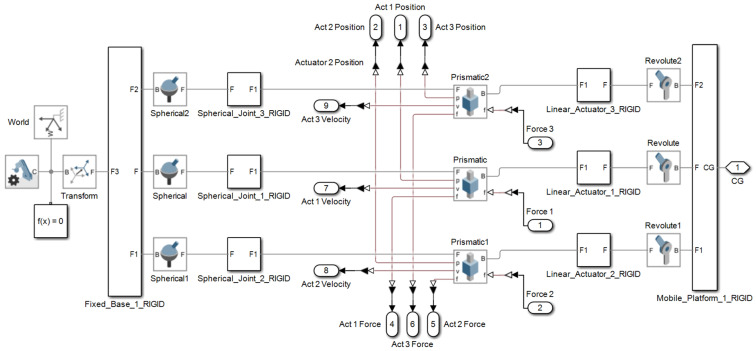 Figure 17
Figure 17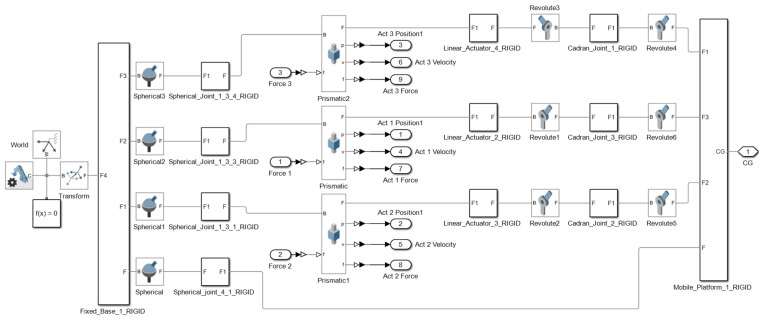 Figure 18
Figure 18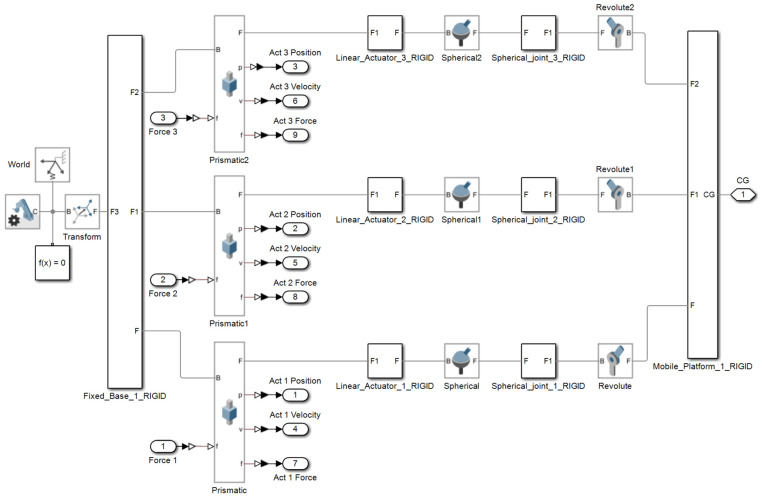 Figure 19
Figure 19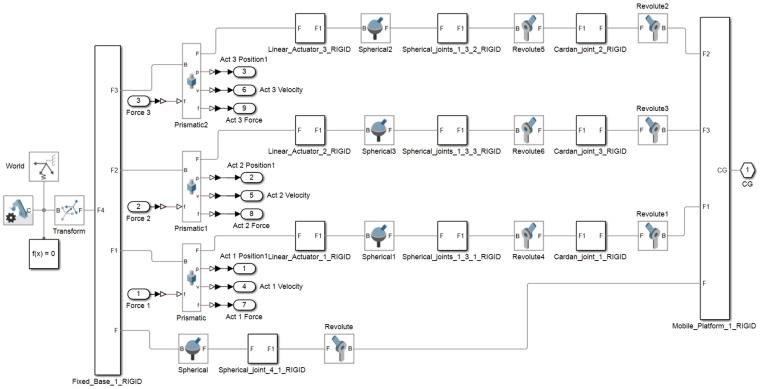 Figure 20
Figure 20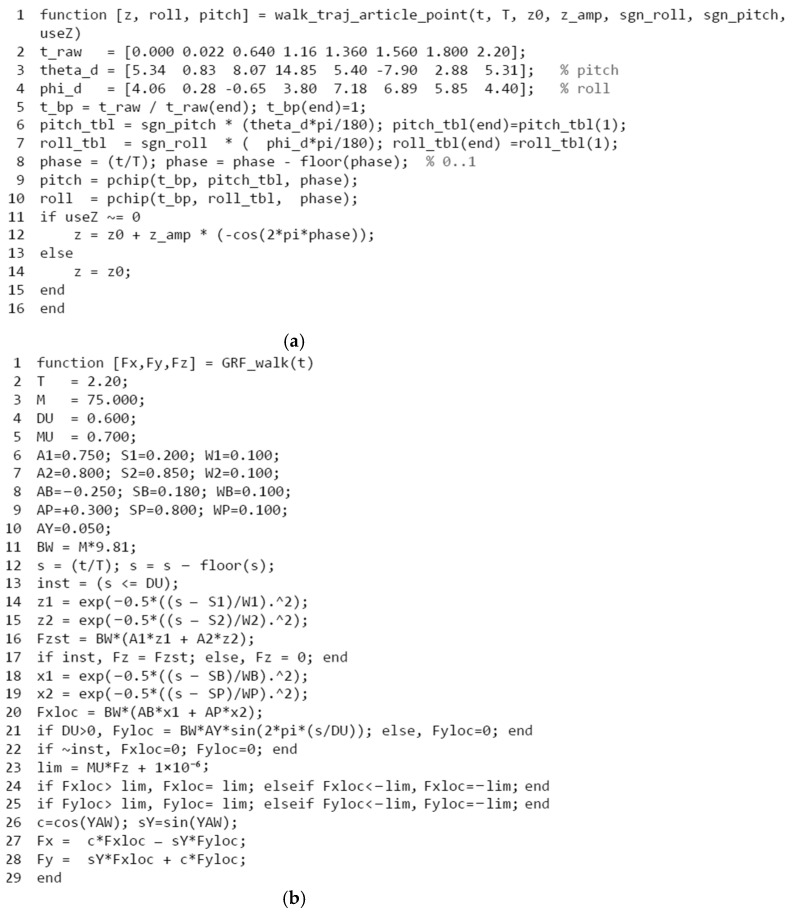 Figure 21
Figure 21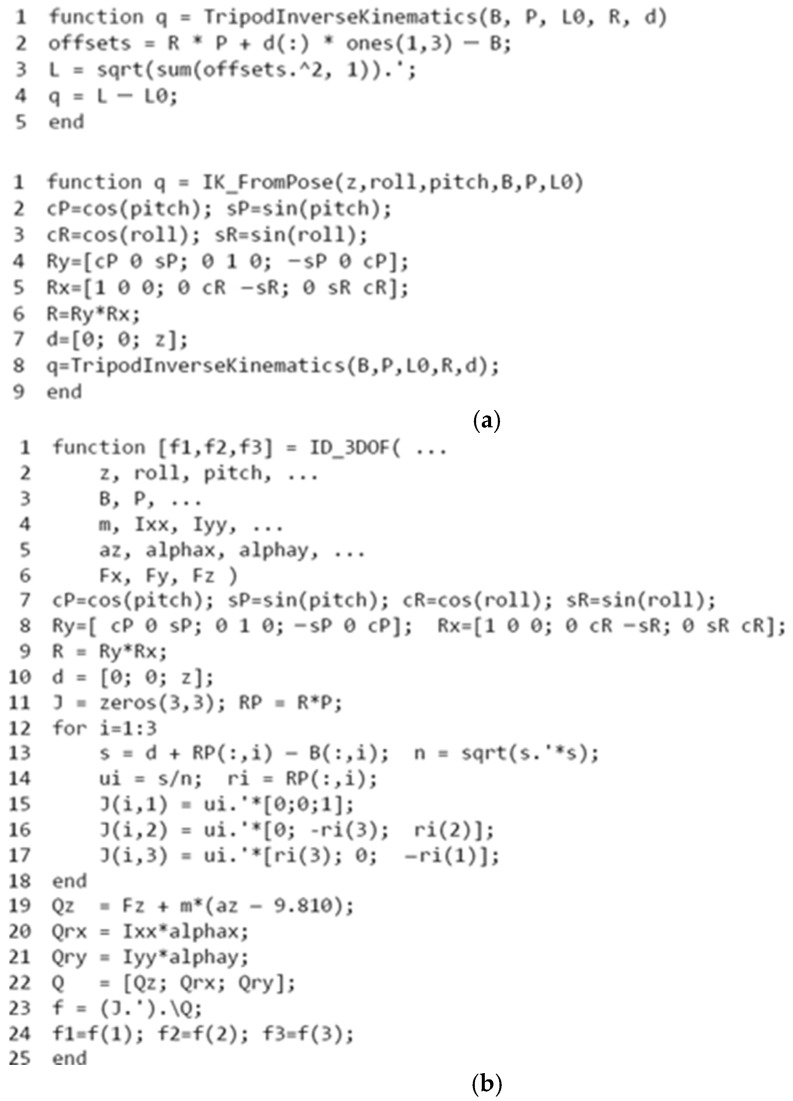 Figure 22
Figure 22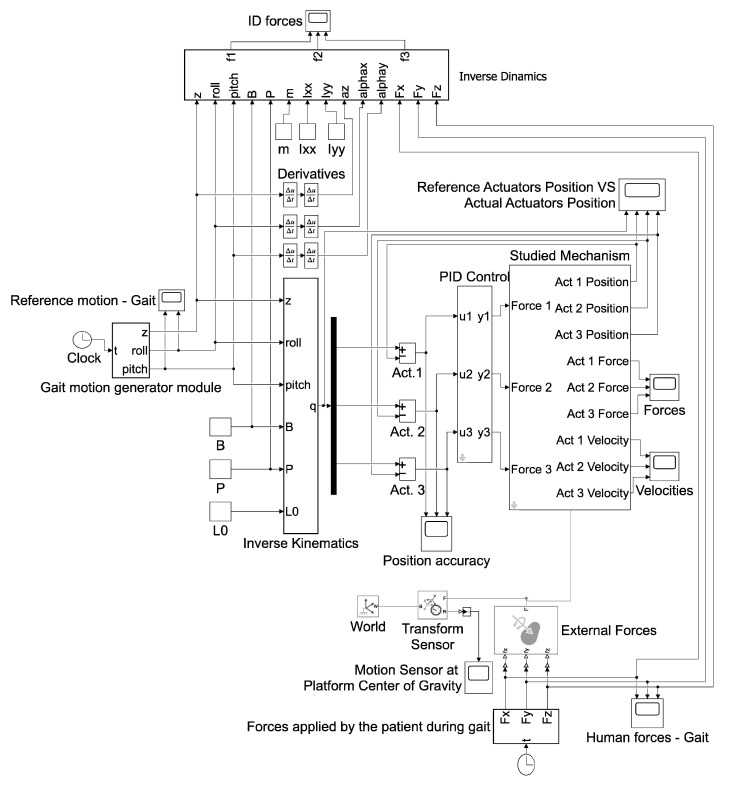 Figure 23
Figure 23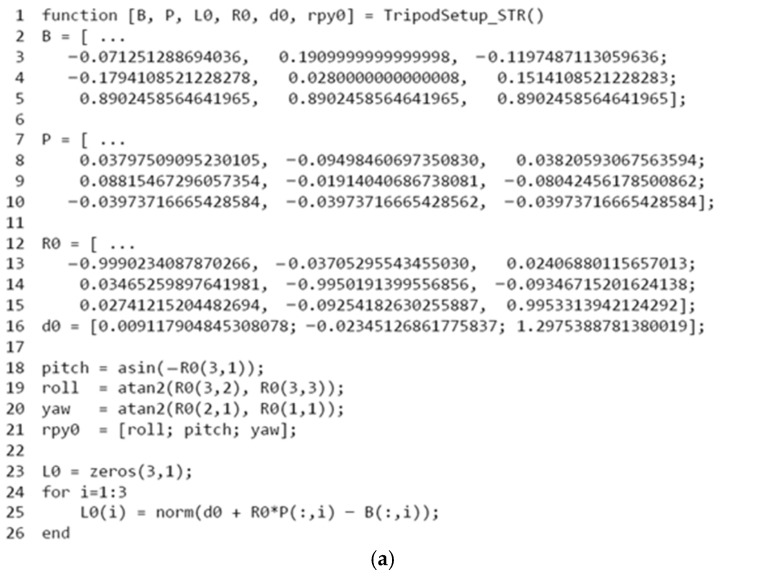 Figure 24
Figure 24 Figure 25
Figure 25Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsStroke Rehabilitation and Recovery · Prosthetics and Rehabilitation Robotics · Robotic Mechanisms and Dynamics