Loong: An Open-Source Platform for Full-Size Universal Humanoid Robot Toward Better Practicality
Lei Jiang, Heng Zhang, Boyang Xing, Zhenjie Liang, Zeyuan Sun, Jingran Cheng, Song Zhou, Xu Song, Xinyue Li, Hai Zhou, Yongyao Li, Yufei Liu

TL;DR
Loong is an open-source full-size humanoid robot platform designed to improve practicality through biomimetic design and efficient control systems.
Contribution
Loong introduces a biomimetic design and modular integration strategy to enhance practicality and control efficiency in full-size humanoid robots.
Findings
Loong can traverse complex terrains like 13 cm steps and 20° slopes.
The robot demonstrates competence in object manipulation and transportation.
The modular design improves adaptability and mass production feasibility.
Abstract
In recent years, humanoid robots have made substantial advances in motion control and multimodal interaction. However, full-size humanoid robots face significant technical challenges due to their inherent geometric and physical properties, leading to large inertia of humanoid robots and substantial driving forces. These characteristics result in issues such as limited biomimetic capabilities, low control efficiency, and complex system integration, thereby restricting practical applications of full-size humanoid robots in real-world settings. To address these limitations, this paper incorporates a biomimetic design approach that draws inspiration from biological structures and movement mechanisms to enhance the robot’s human-like movements and overall efficiency. The platform introduced in this paper, Loong, is designed to overcome these challenges, offering a practically viable solution…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
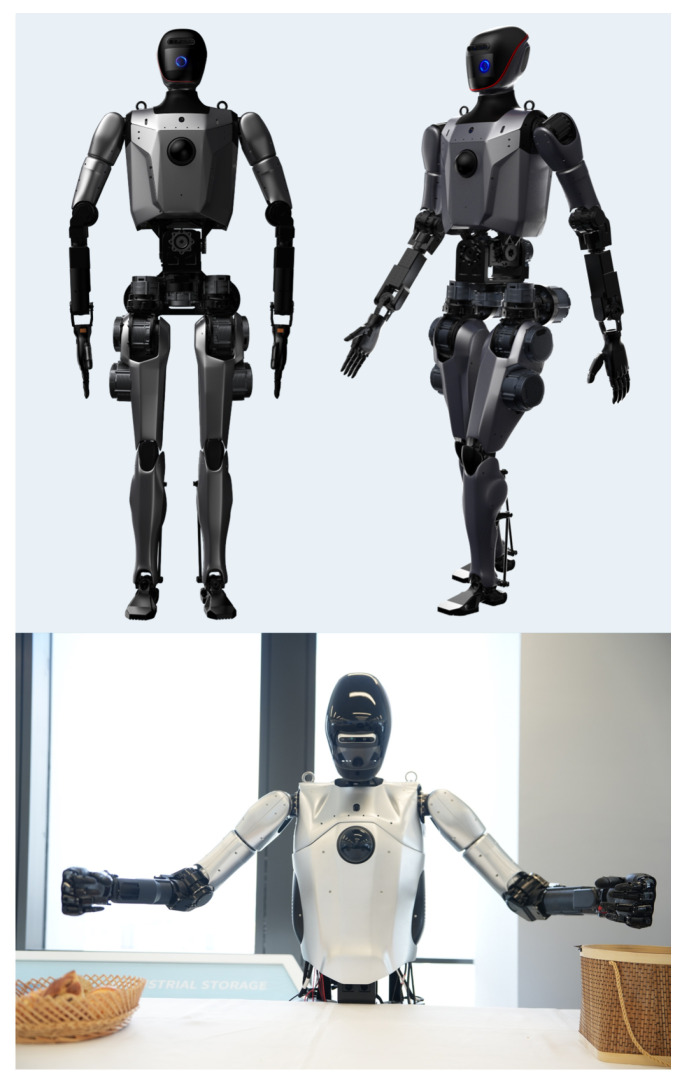 Figure 1
Figure 1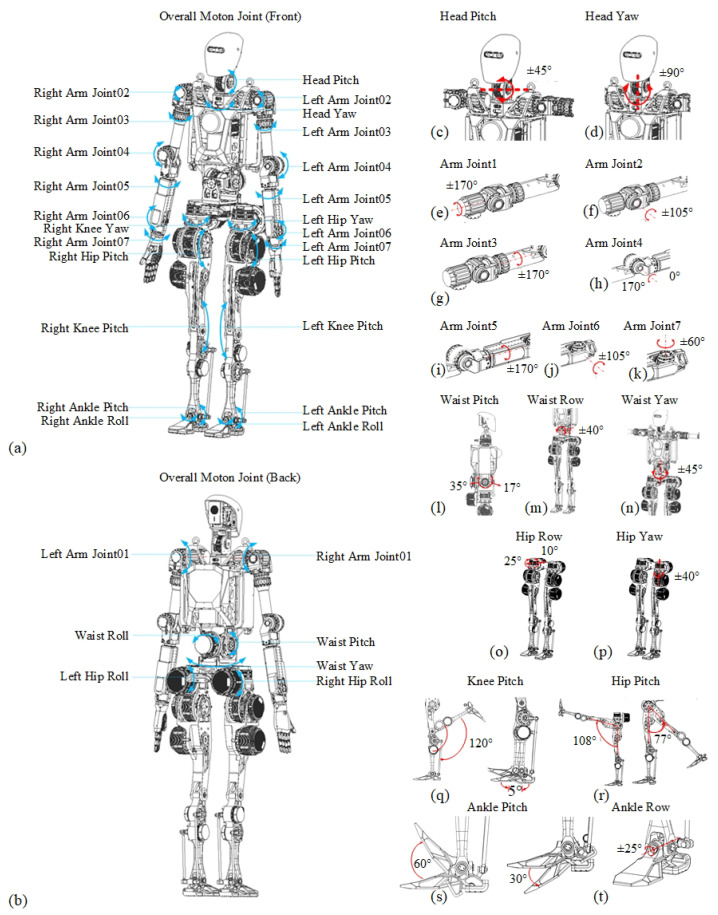 Figure 2
Figure 2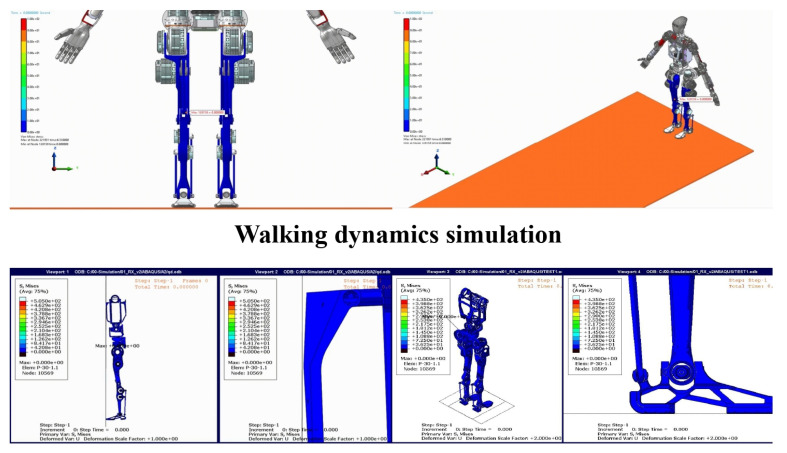 Figure 3
Figure 3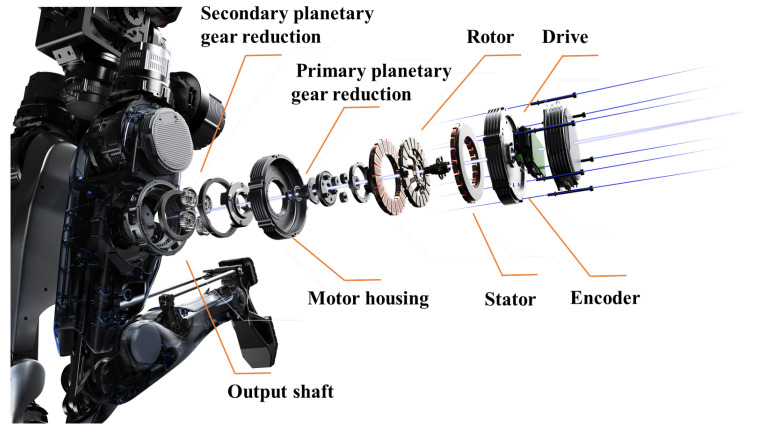 Figure 4
Figure 4 Figure 5
Figure 5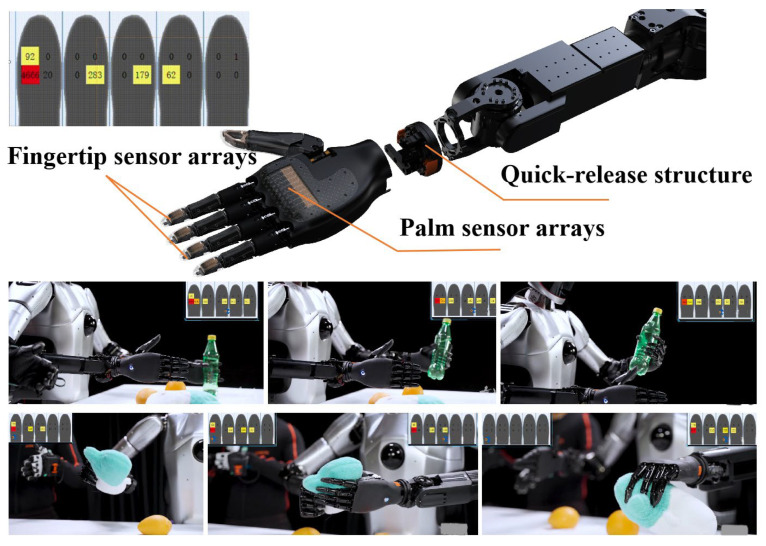 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11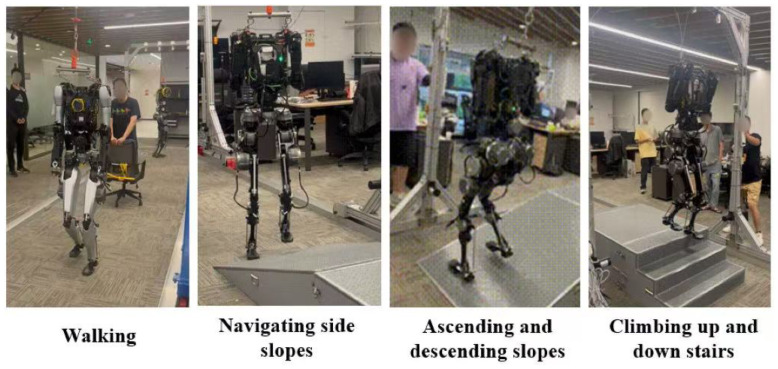 Figure 12
Figure 12 Figure 13
Figure 13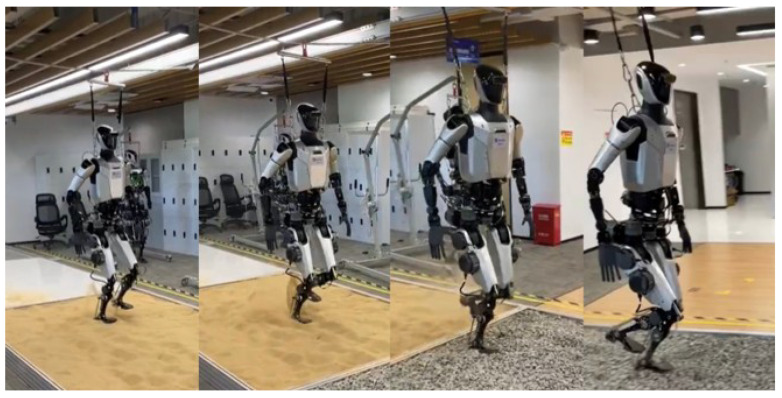 Figure 14
Figure 14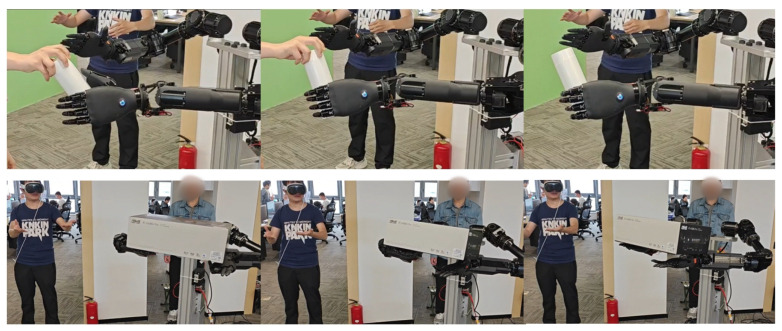 Figure 15
Figure 15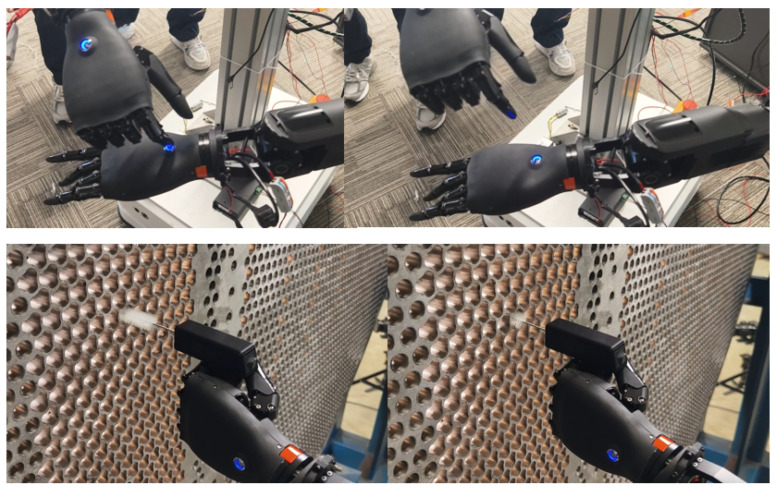 Figure 16
Figure 16 Figure 17
Figure 17Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Locomotion and Control · Prosthetics and Rehabilitation Robotics · Social Robot Interaction and HRI