A Two-Stage Reinforcement Learning Framework for Humanoid Robot Sitting and Standing-Up
Xisheng Jiang, Shihai Zhao, Yudi Zhu, Qingdu Li, Jianwei Zhang

TL;DR
This paper introduces a two-stage reinforcement learning framework to teach humanoid robots to sit and stand up smoothly in real-world scenarios.
Contribution
A novel two-stage RL framework that improves motion smoothness and stability for humanoid robot sitting and standing.
Findings
The two-stage approach enables stable execution of sitting and standing in real-world scenarios.
The bi-level optimization model dynamically adjusts tracking precision for smoother transitions.
The method was successfully applied to a 1.7 m adult-scale humanoid robot.
Abstract
In human daily-life scenarios, humanoid robots need not only to stand up smoothly but also to autonomously sit down for rest, energy management, and interaction. This capability is crucial for enhancing their autonomy and practicality. However, both sitting and standing involve complex dynamics constraints, diverse initial postures, and unstructured terrains, which make traditional hand-crafted controllers insufficient for multi-scenario demands. Reinforcement Learning (RL), with its generalization ability across high-dimensional state spaces and complex tasks, offers a promising solution for automatically generating motion control policies. Nevertheless, policies trained directly with RL often produce abrupt motions, making it difficult to balance smoothness and stability. To address these challenges, we propose a two-stage reinforcement learning framework: In the first stage, we focus…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1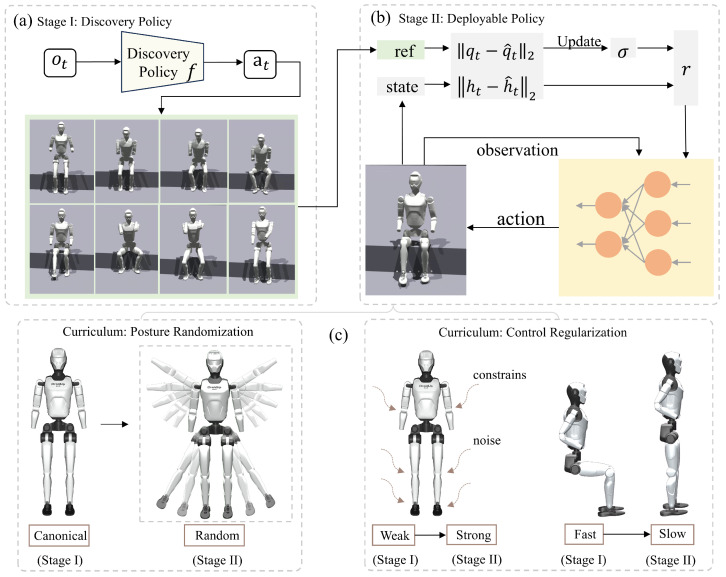 Figure 2
Figure 2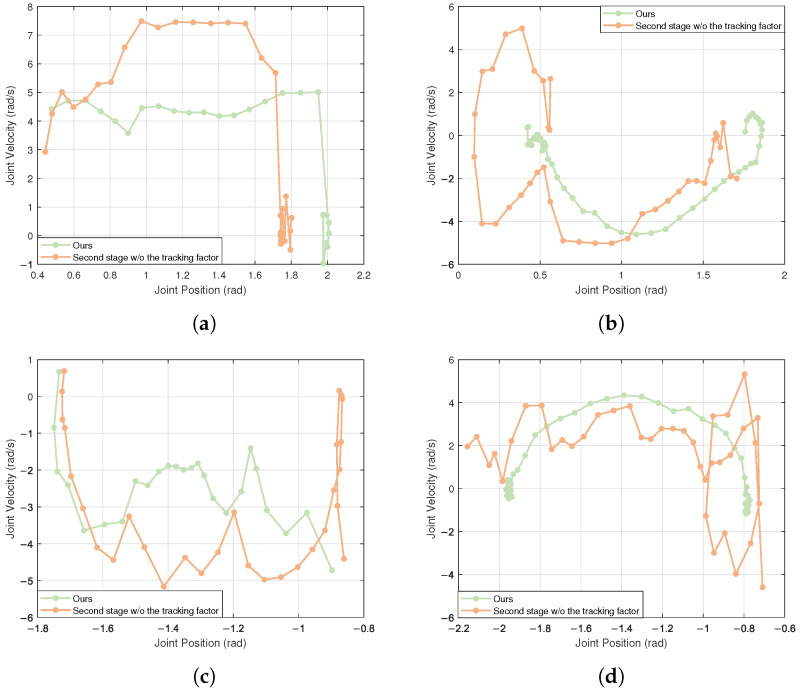 Figure 3
Figure 3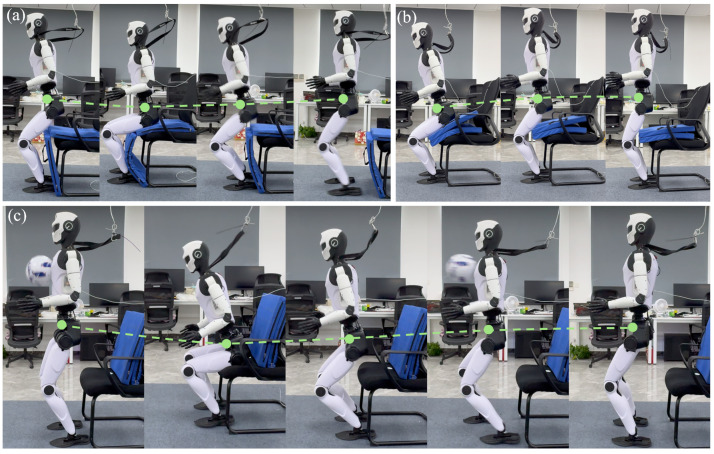 Figure 4
Figure 4Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Locomotion and Control · Robot Manipulation and Learning · Motor Control and Adaptation