MEIAO: A Multi-Strategy Enhanced Information Acquisition Optimizer for Global Optimization and UAV Path Planning
Yongzheng Chen, Ruibo Sun, Jun Zheng, Yuanyuan Shao, Haoxiang Zhou

TL;DR
This paper introduces MEIAO, an improved optimizer for UAV path planning in complex 3D environments, enhancing exploration and robustness.
Contribution
The novel MEIAO algorithm integrates multi-strategies like Levy Flight and adaptive differential evolution for improved UAV path planning.
Findings
MEIAO outperformed eight algorithms on CEC benchmark suites in terms of exploration and robustness.
MEIAO achieved a 25.7% reduction in average path cost for UAVs in 3D mountainous terrain compared to IAO.
Generated paths were smoother, collision-free, and converged faster in complex environments.
Abstract
With the expansion of unmanned aerial vehicles (UAVs) into complex three-dimensional (3D) terrains for reconnaissance, rescue, and related missions, traditional path planning methods struggle to meet multi-constraint and multi-objective requirements. Existing swarm intelligence algorithms, limited by the “no free lunch” theorem, also face challenges when the standard Information Acquisition Optimizer (IAO) is applied to such tasks, including low exploration efficiency in high-dimensional search spaces, rapid loss of population diversity, and improper boundary handling. To address these issues, this study proposes a Multi-Strategy Enhanced Information Acquisition Optimizer (MEIAO). First, a Levy Flight-based information collection strategy is introduced to leverage its combination of short-range local searches and long-distance jumps, thereby broadening global exploration. Second, an…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
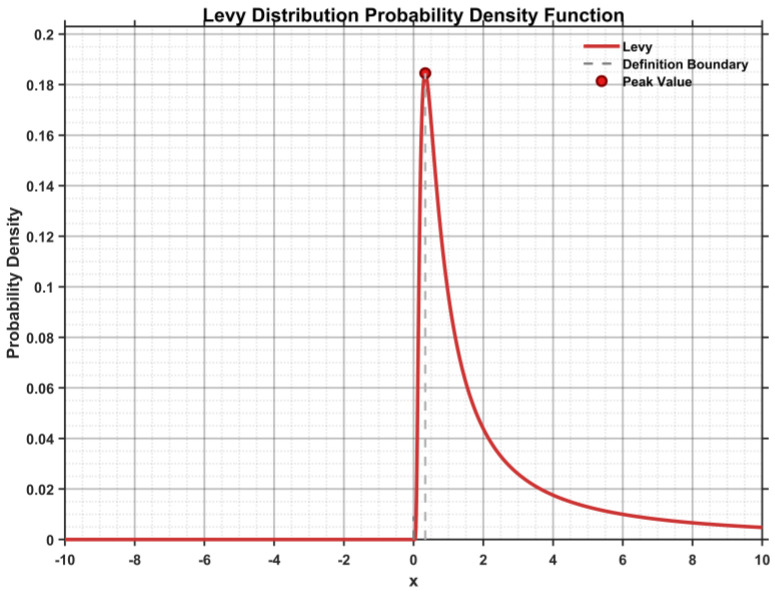 Figure 1
Figure 1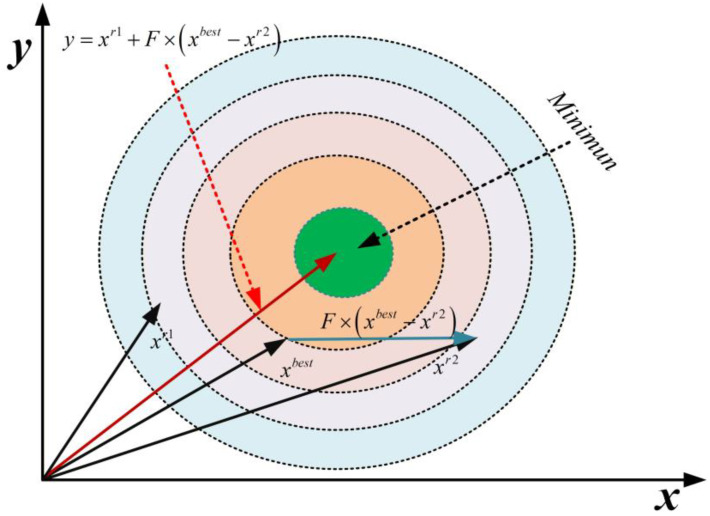 Figure 2
Figure 2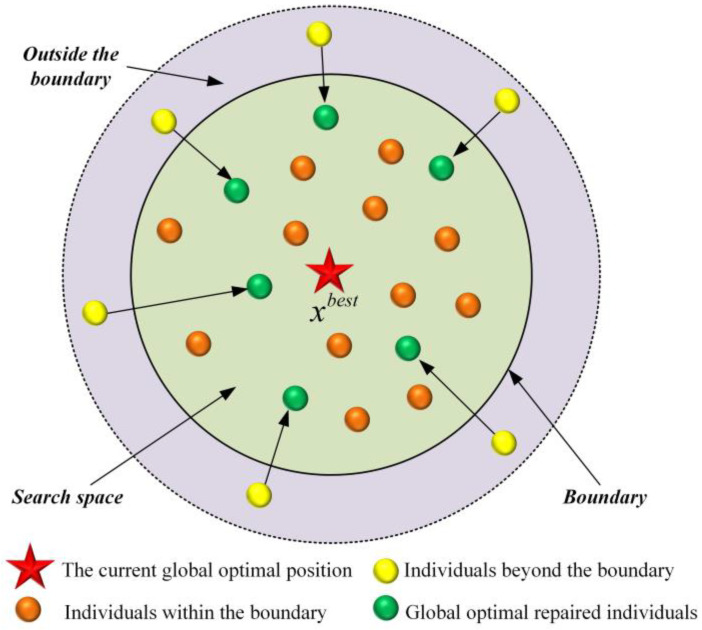 Figure 3
Figure 3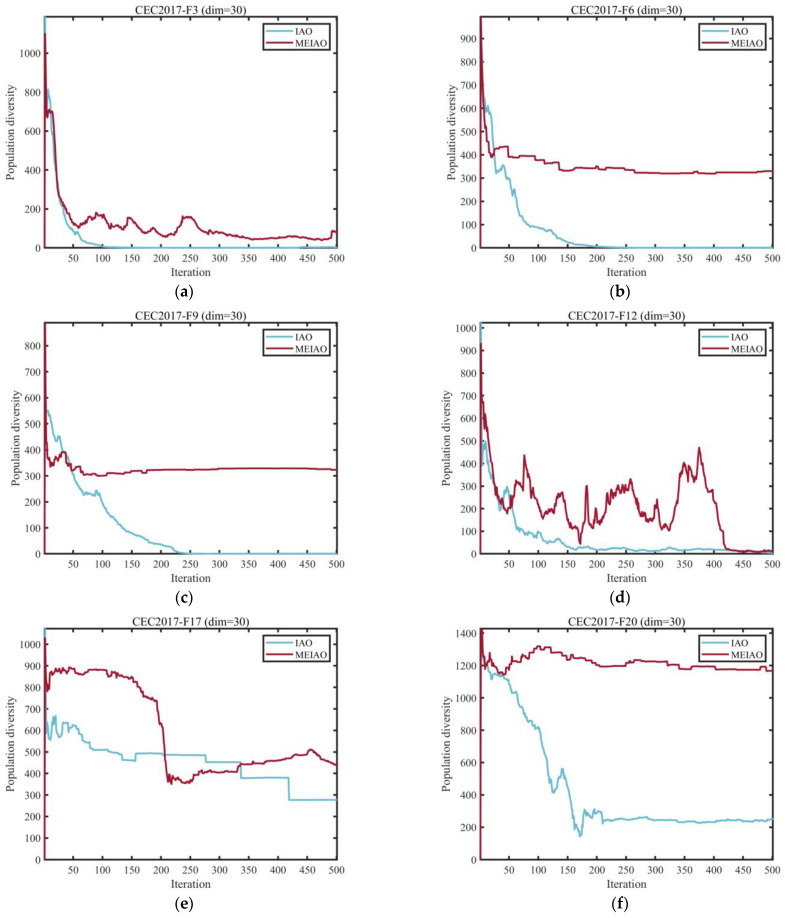 Figure 4
Figure 4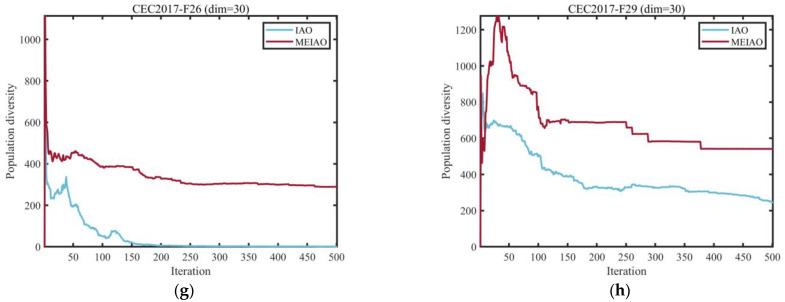 Figure 5
Figure 5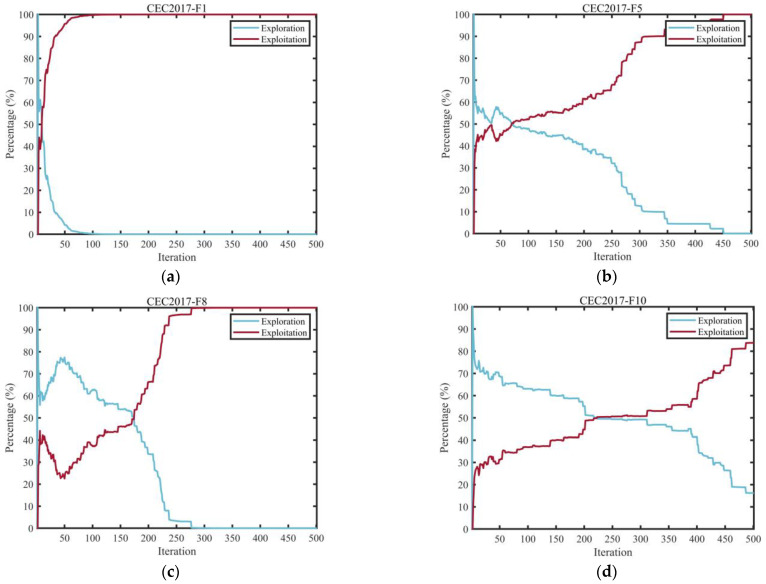 Figure 6
Figure 6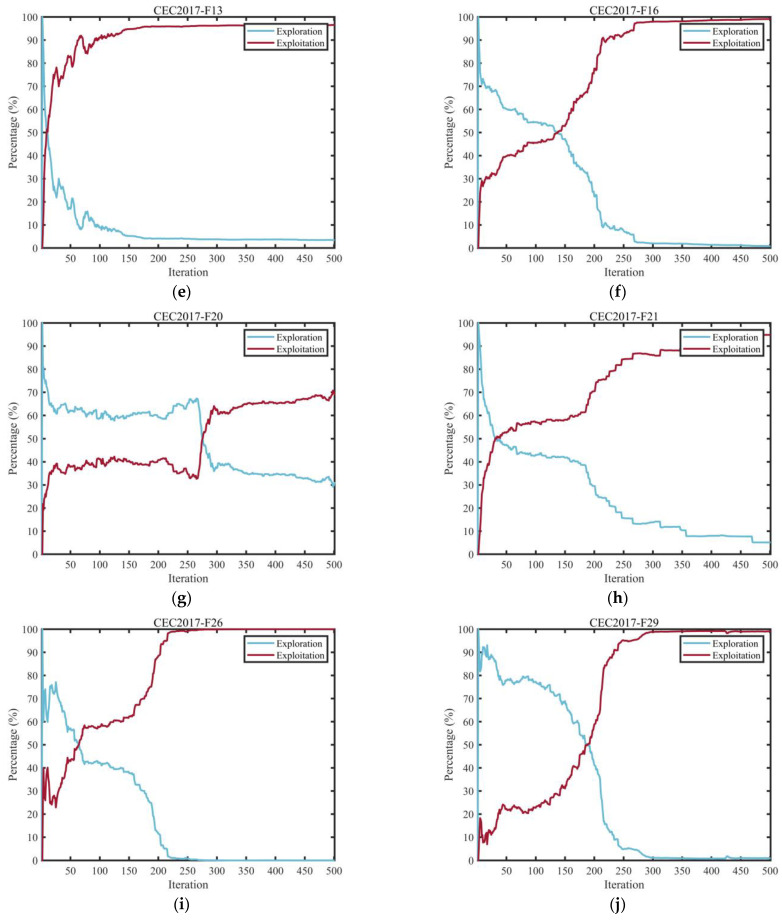 Figure 7
Figure 7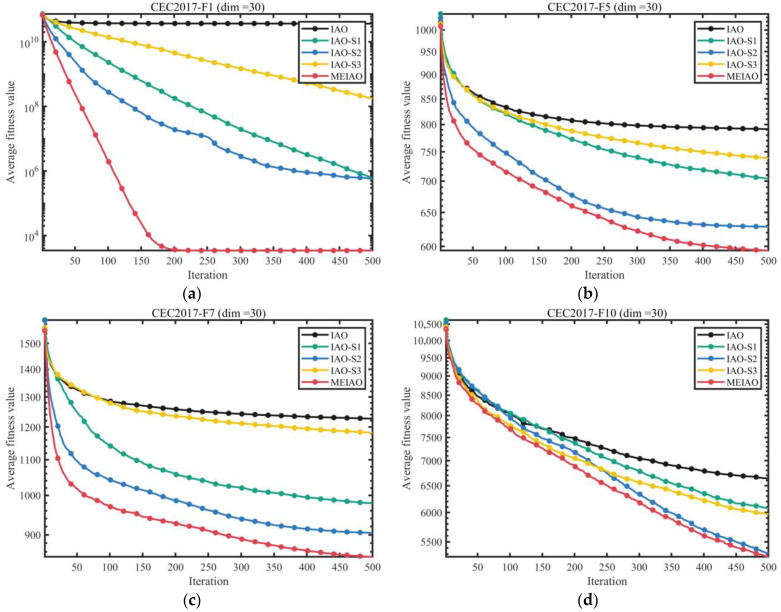 Figure 8
Figure 8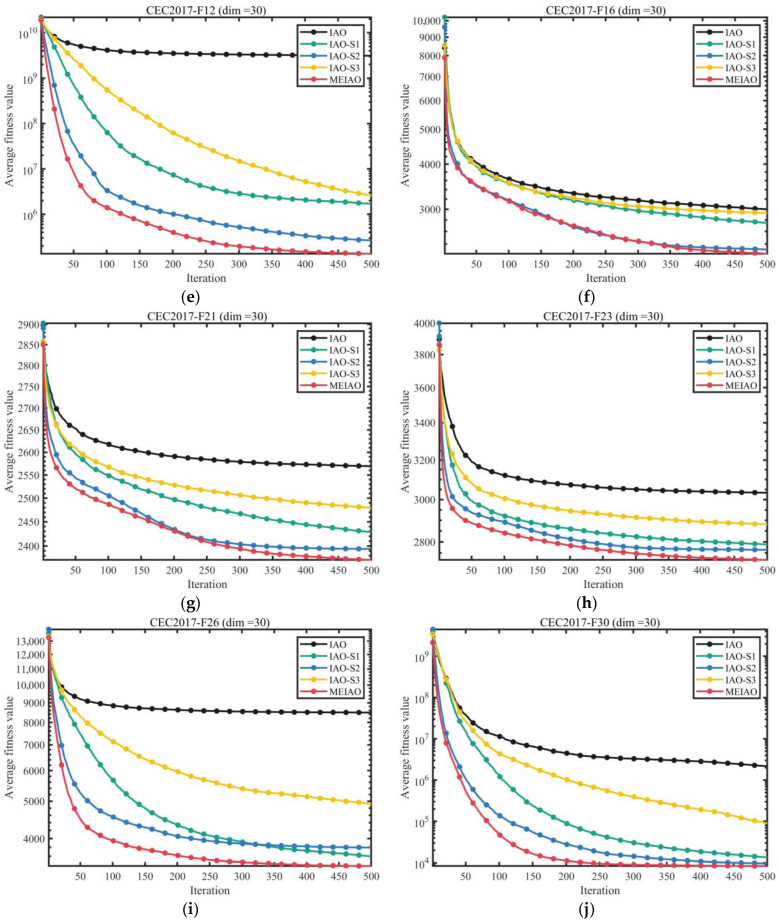 Figure 9
Figure 9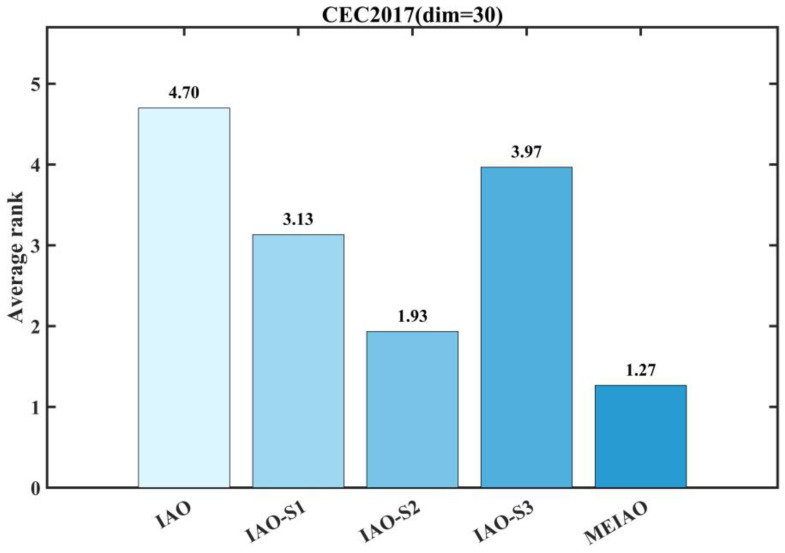 Figure 10
Figure 10 Figure 11
Figure 11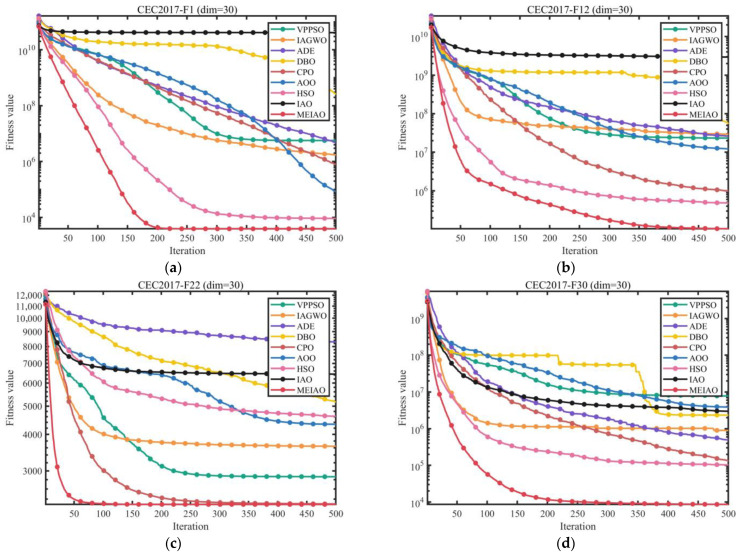 Figure 12
Figure 12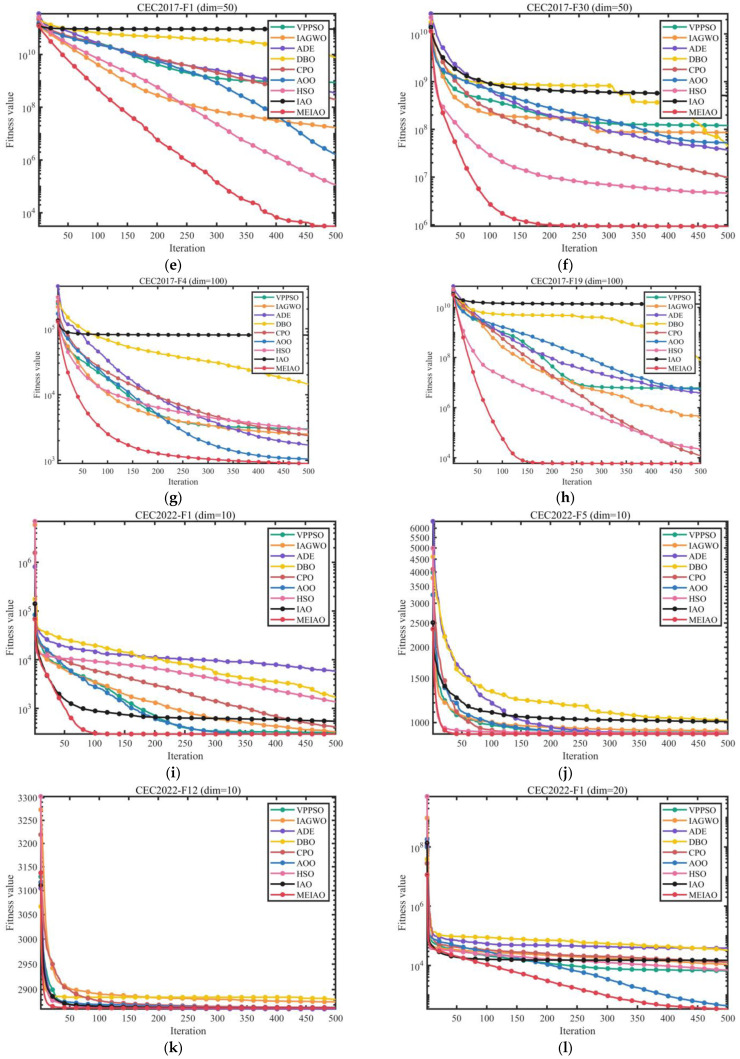 Figure 13
Figure 13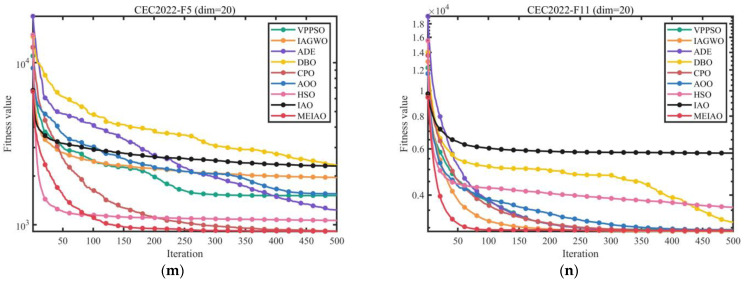 Figure 14
Figure 14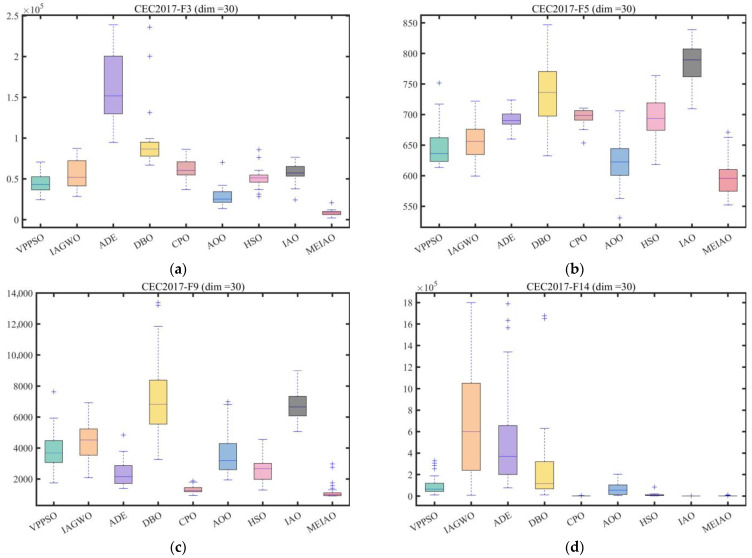 Figure 15
Figure 15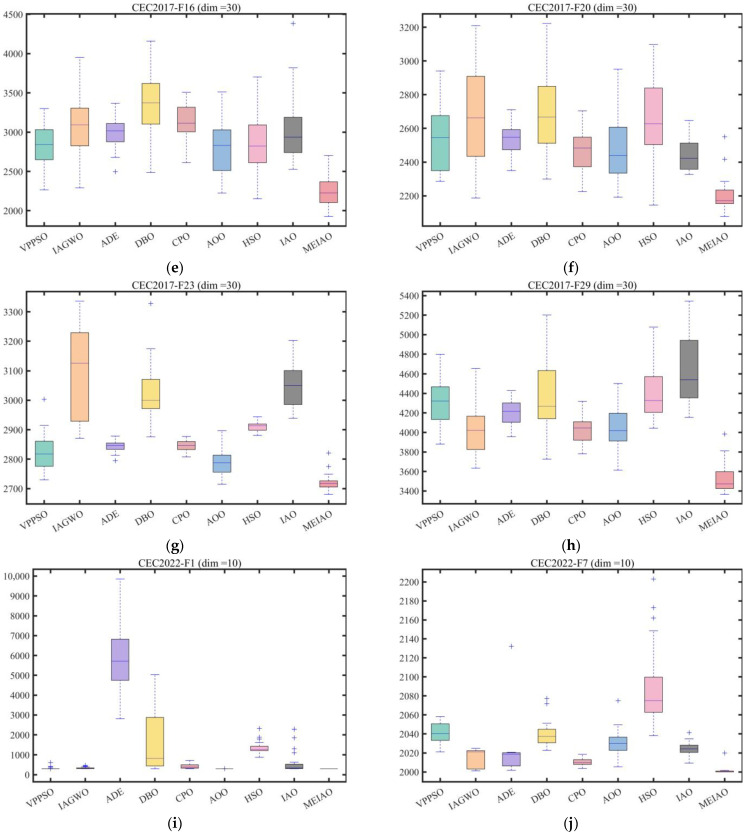 Figure 16
Figure 16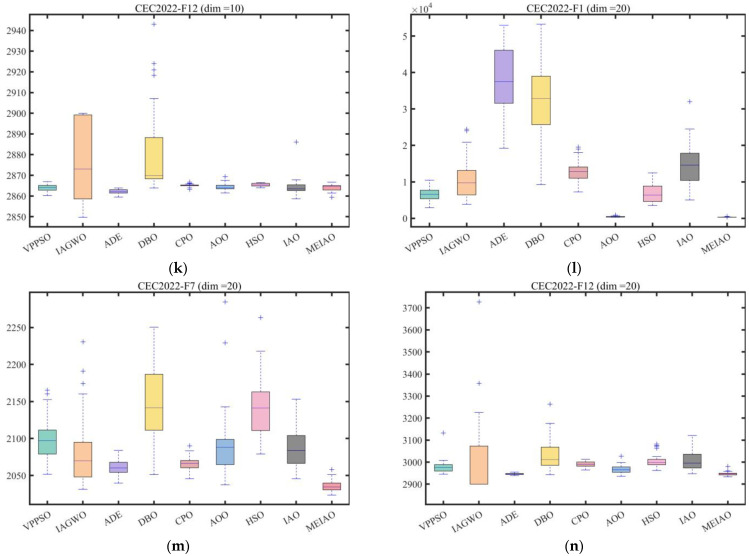 Figure 17
Figure 17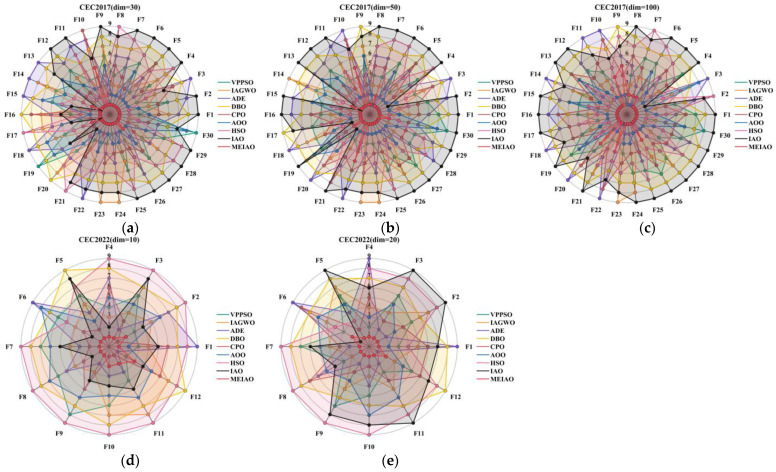 Figure 18
Figure 18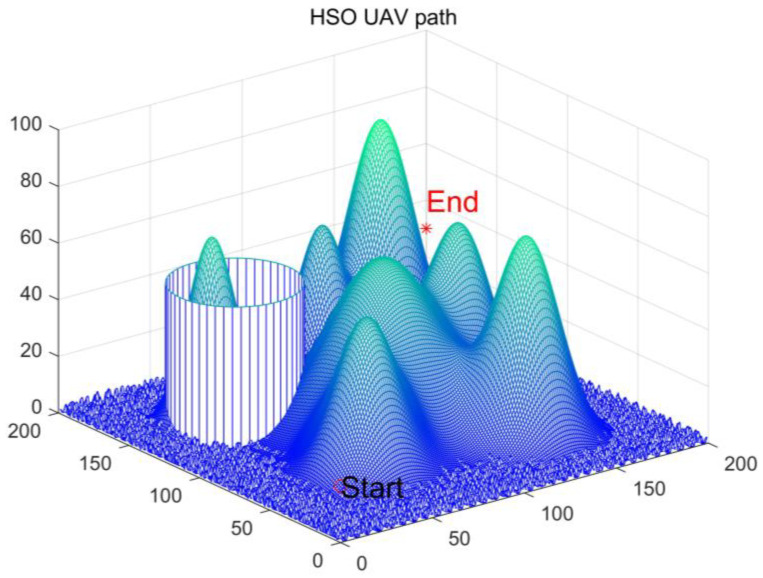 Figure 19
Figure 19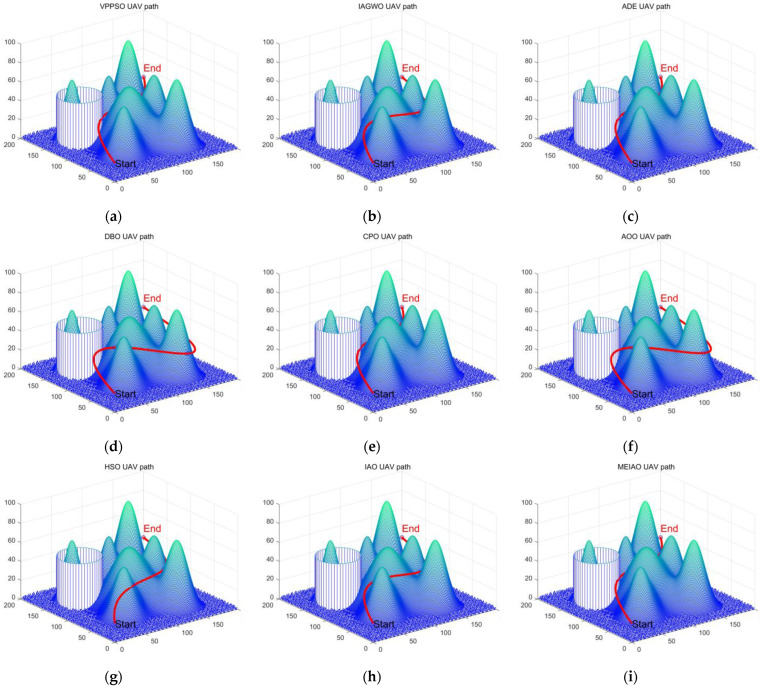 Figure 20
Figure 20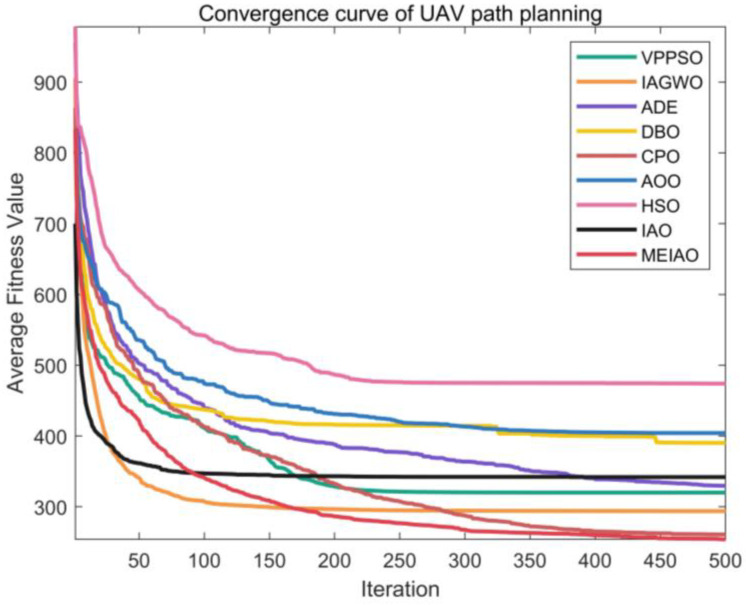 Figure 21
Figure 21Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Path Planning Algorithms · UAV Applications and Optimization · Metaheuristic Optimization Algorithms Research