DT-Loong: A Digital Twin Simulation Framework for Scalable Data Collection and Training of Humanoid Robots
Yufei Liu, Yang Li, Jinda Du, Yanjie Rui, Yongyao Li

TL;DR
DT-Loong is a digital twin system that enables efficient data collection and training for humanoid robots using high-fidelity simulations and real-time feedback.
Contribution
The novel contribution is the DT-Loong framework with a Priority-Guided Quadratic Optimization algorithm for real-time motion retargeting and anomaly detection.
Findings
DT-Loong generates high-quality training data using optical motion capture and motion re-targeting.
The Priority-Guided Quadratic Optimization algorithm improves mapping accuracy and reduces time delay.
The framework supports real-time environmental feedback and is suitable for monitoring and patrol applications.
Abstract
Recent advances in bionic intelligence are reshaping humanoid-robot design, demonstrating unprecedented agility, dexterity and task versatility. These breakthroughs drive an increasing need for large scale and high-quality data. Current data generation methods, however, are often expensive and time-consuming. To address this, we introduce Digital Twin Loong (DT-Loong), a digital twin system that combines a high-fidelity simulation environment with a full-scale virtual replica of the humanoid robot Loong, a bionic robot encompassing biomimetic joint design and movement mechanism. By integrating optical motion capture and human-to-humanoid motion re-targeting technologies, DT-Loong generates data for training and refining embodied AI models. We showcase the data collected from the system is of high quality. DT-Loong also proposes a Priority-Guided Quadratic Optimization algorithm for…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
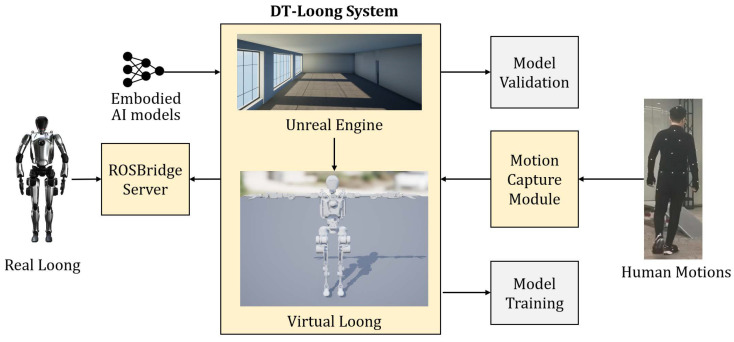 Figure 1
Figure 1 Figure 2
Figure 2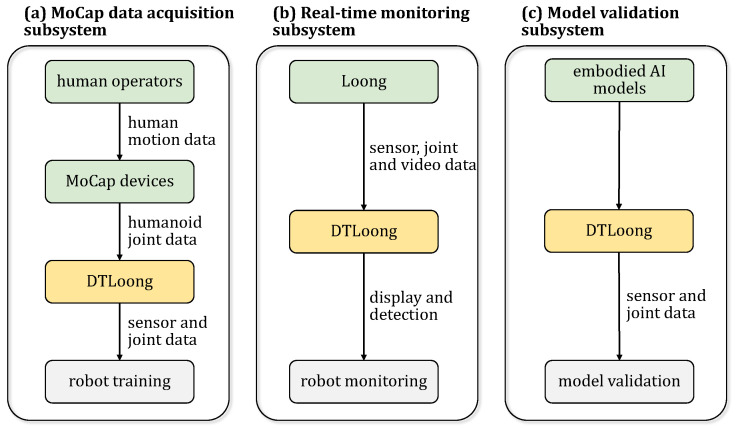 Figure 3
Figure 3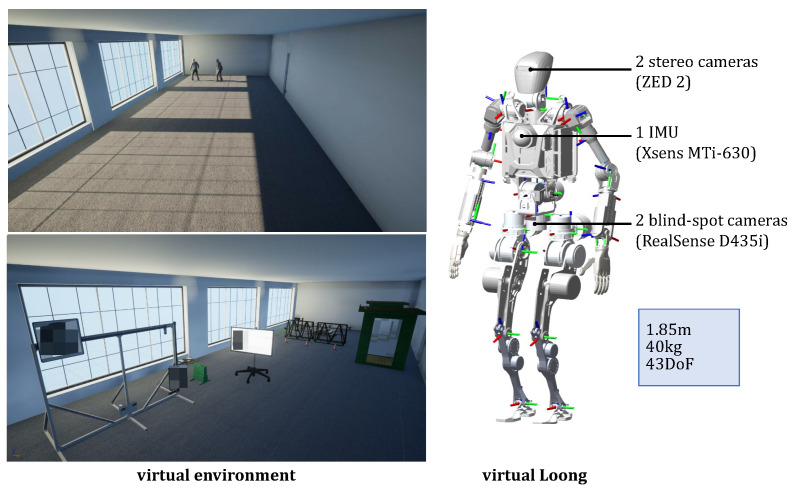 Figure 4
Figure 4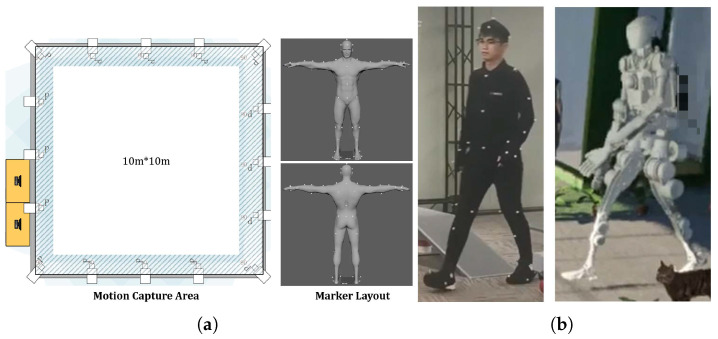 Figure 5
Figure 5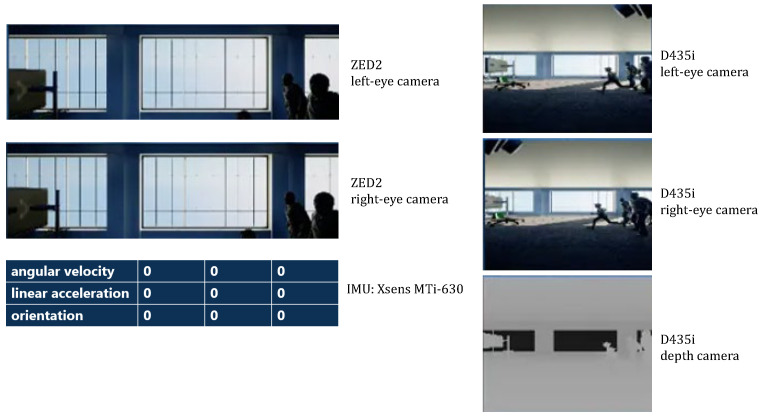 Figure 6
Figure 6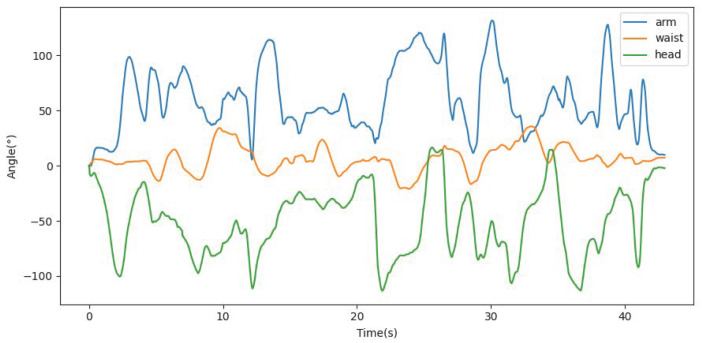 Figure 7
Figure 7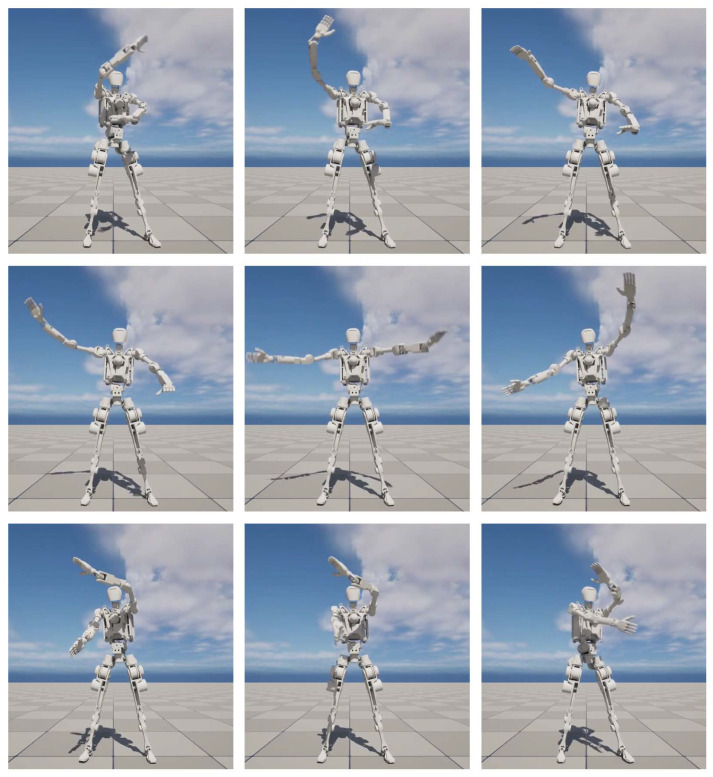 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Locomotion and Control · Human Motion and Animation · Social Robot Interaction and HRI