Development of a Numerical Model of a Bio-Inspired Sea Lion Robot
Shraman Kadapa, Nicholas Marcouiller, Anthony C. Drago, James L. Tangorra, Harry G. Kwatny

TL;DR
Researchers developed a numerical model for a sea lion-inspired robot to improve underwater robot performance by simulating and analyzing its motion in water.
Contribution
A validated numerical model for a bio-inspired sea lion robot using Euler–Poincaré formulation and refined hydrodynamic coefficients.
Findings
The model accurately predicts the robot's translation and orientation in water.
Hydrodynamic coefficients were refined using a genetic algorithm to reduce the sim-to-real gap.
The framework supports simulation, control, and optimization of bio-inspired multi-body systems.
Abstract
There is a growing demand for underwater robots to support offshore tasks such as exploration, environmental monitoring, and critical underwater missions. To enhance the performance of these systems, researchers are increasingly turning to biological inspiration to develop robots that understand and adapt the swimming strategies of aquatic animals. Numerical modeling plays a critical role in evaluating and improving the performance of these complex, multi-body robotic systems. However, developing accurate models for multi-body robots that swim freely in three dimensions remains a significant challenge. This study presents the development and validation of a numerical model of a bio-inspired California sea lion (Zalophus californianus) robot. The model was developed to simulate, analyze, and visualize the robot’s body motions in water. The equations of motion were derived in closed form…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
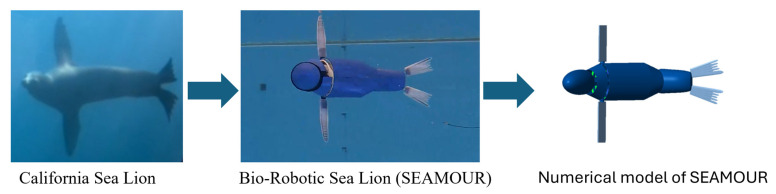 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12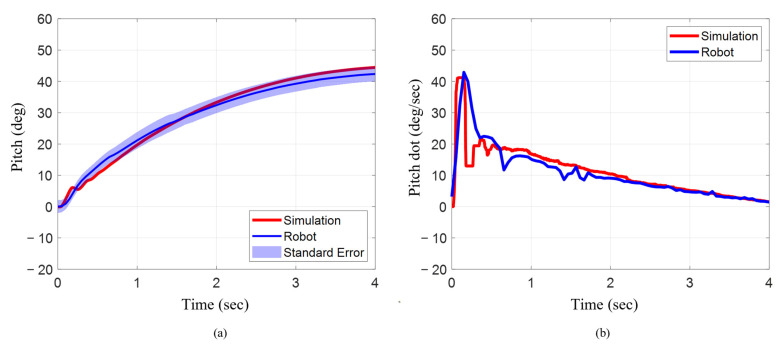 Figure 13
Figure 13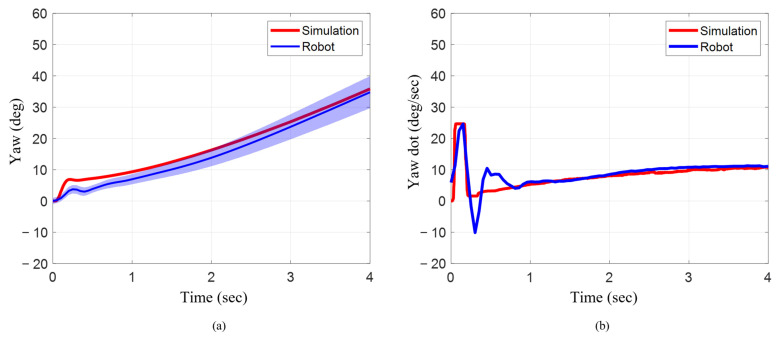 Figure 14
Figure 14 Figure 15
Figure 15 Figure 16
Figure 16 Figure 17
Figure 17 Figure 18
Figure 18 Figure 19
Figure 19 Figure 20
Figure 20 Figure 21
Figure 21Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsBiomimetic flight and propulsion mechanisms · Underwater Vehicles and Communication Systems · Marine animal studies overview