Depth-estimation of stiffness singularity in an elastic object via directional touch sensing using microfinger with tactile sensor
Y. Hori, S. Konishi

TL;DR
This paper introduces a microfinger with tactile sensors to detect stiffness in tissues, enabling precise 3D depth estimation for minimally invasive medical diagnosis.
Contribution
A novel microfinger with directional touch sensing and a 3D coordinate estimation algorithm for stiffness singularity detection in elastic objects.
Findings
The microfinger exerted a pushing force over 1 N and performed directional palpation.
Depth estimation of stiffness singularities reached ±1.3 mm at 15 mm depth in silicone gel.
Three-dimensional positional estimation was achieved using directional touch sensing.
Abstract
Understanding object information during robotic hand grasping is a key goal in robotics. Researchers have integrated tactile sensors to replicate artificial haptics on humanoid robot fingertips, but robotic grasping has yet to be fully applied in palpation-based medical diagnosis. Current techniques, such as vibration-based ultrasound-assisted surgeries, face limitations in diagnosis due to anatomical constraints or surgical access issues. To address this, we explored palpation-assisted surgeries using a microfinger, a miniaturized version of a human finger. We developed micromachine-based palpation techniques for advanced minimally invasive diagnosis using endoscopes. Specifically, we developed a microfinger with artificial muscle and tactile sensors, designed to detect stiffness singularities in pseudo-biological tissues. Our microfinger, thin and small, exerted a pushing force…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
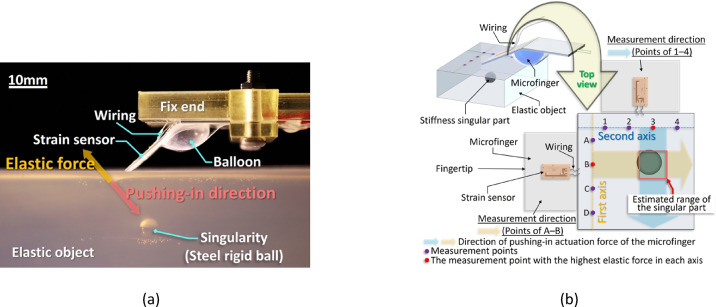 Figure 1
Figure 1 Figure 2
Figure 2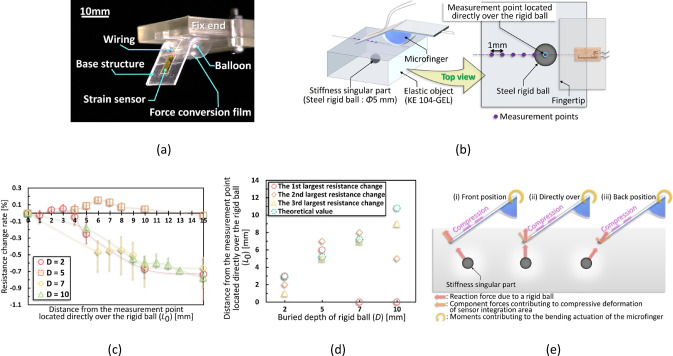 Figure 3
Figure 3 Figure 4
Figure 4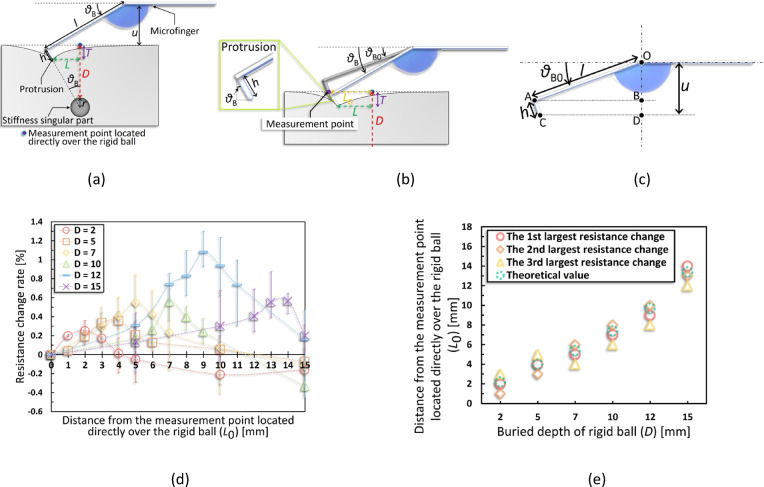 Figure 5
Figure 5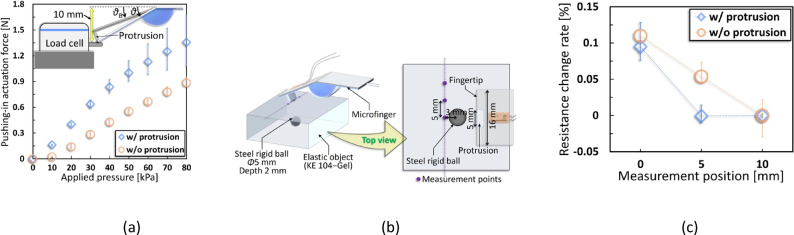 Figure 6
Figure 6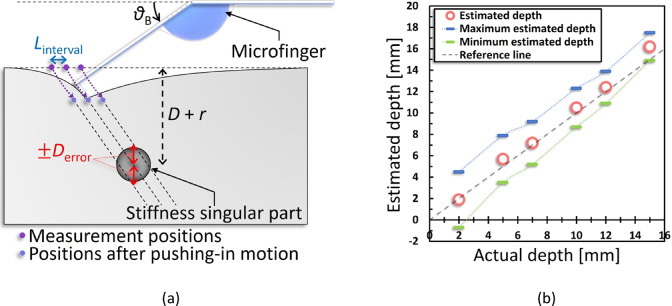 Figure 7
Figure 7Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsSoft Robotics and Applications · Advanced Sensor and Energy Harvesting Materials · Tactile and Sensory Interactions