Planning Non‐Linear Trajectories for No‐Touch Thermal Ablation Using Passive Steerable Needle With Controlled Stiffness and PSAM
Antoine Morin, Juan Manuel Verde, Lennart Rubbert, Alain Garcia, Caroline Essert

TL;DR
This paper introduces a new method called PSAM to plan thermal ablation procedures using a flexible needle, reducing risks and avoiding multiple insertions.
Contribution
The novel PSAM method optimizes non-linear ablation trajectories with safety constraints using a passive steerable needle.
Findings
PSAM outperformed manual and Monte Carlo planning in optimizing ablation trajectories.
The ARC needle with controlled stiffness enabled single-insertion no-touch ablations.
PSAM reduced damage to healthy tissue while respecting anatomical safety distances.
Abstract
Percutaneous thermal ablation using a passive steering needle has the potential to help reduce procedure risks and enable multiple ablations with a single insertion. However, manual planning of such procedures is challenging, time‐consuming, and typically done using CT‐scans or tools designed for rigid or active steering needles. We introduce the PSAM approach which is based on an enhanced version of the particle swarm optimization with a memory component. This tool calculates optimal trajectories for no‐touch thermal ablations, considering safety distances from obstacles such as bones and organs, and the amount of ablation affecting healthy tissue. Experiments were conducted on a passive steerable needle with controlled stiffness named ARC needle recently developed. The results are then compared with a semi‐exhaustive Monte‐Carlo approach and a manual planning by a trained surgeon…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1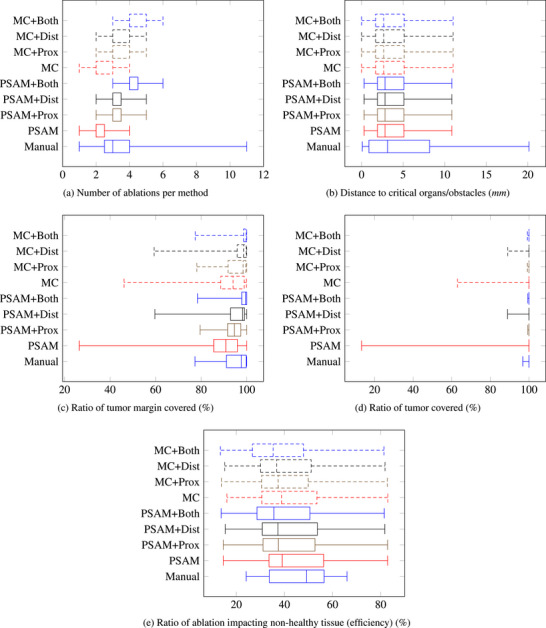 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4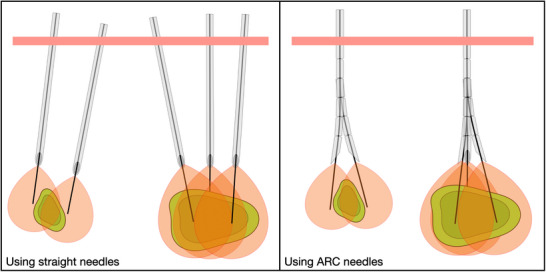 Figure 5
Figure 5 Figure 6
Figure 6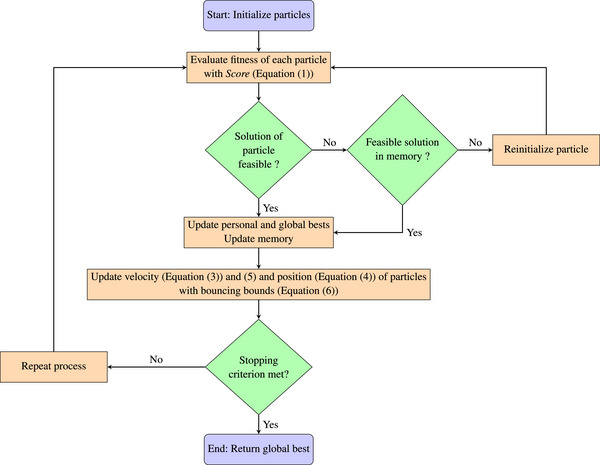 Figure 7
Figure 7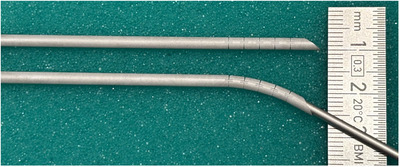 Figure 8
Figure 8Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsSoft Robotics and Applications · Robot Manipulation and Learning · Teleoperation and Haptic Systems