Swarm coordination of fish-like magnetic soft robots: directed aggregation and shape-adaptive attachment toward efficient drug delivery
Liyang Mao, Chenyao Tian, Peng Yang, Xianghe Meng, Xingjian Shen, Hao Zhang, Hui Xie

TL;DR
This paper introduces magnetic soft robots inspired by fish behavior that can coordinate in swarms to deliver drugs more effectively to specific areas in the body.
Contribution
The novel approach uses programmed magnetic fields to control the collective movement and attachment of miniature soft robots for efficient drug delivery.
Findings
Robots can be controlled with global magnetic fields to aggregate at specific lesion areas.
Fish-like maneuvers and shape-adaptive attachment are achieved through oscillating and gradient magnetic fields.
The method enables efficient therapeutic payload delivery through coordinated swarm behavior.
Abstract
Miniature magnetic untethered soft robots offer promising opportunities for biomedical applications due to their tissue compatibility, functionalizable dimensions and flexible locomotion capabilities. However, their small size creates a mismatch between coverage area and lesion regions, limiting drug delivery efficacy. Here, inspired by natural fish migration and foraging behaviors, we present an approach to overcome these limitations through swarm coordination of fish-like magnetic soft robots. Individual robots with simplified designs for scalable production can perform constrained six-degrees-of-freedom fish-like maneuvers under an oscillating magnetic field and gradient magnetic field. By exploiting the unique property of the constant component of the oscillating magnetic field dominating the swimming direction when the actuation frequency approaches the robot’s natural frequency,…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
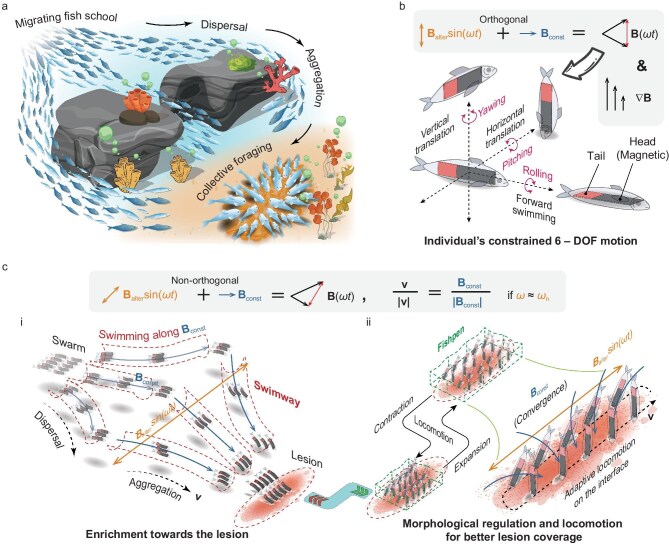 Figure 1
Figure 1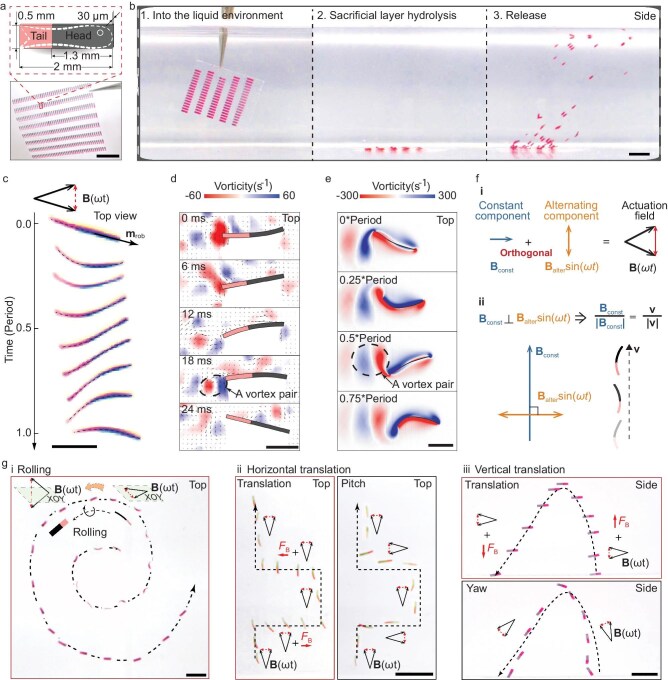 Figure 2
Figure 2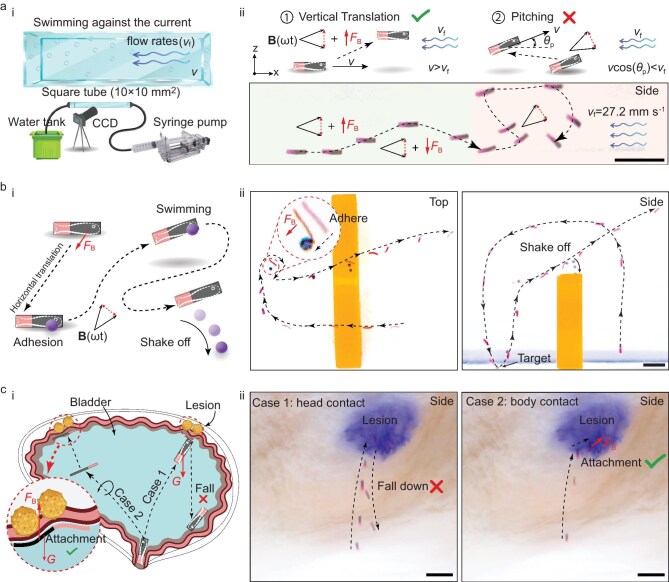 Figure 3
Figure 3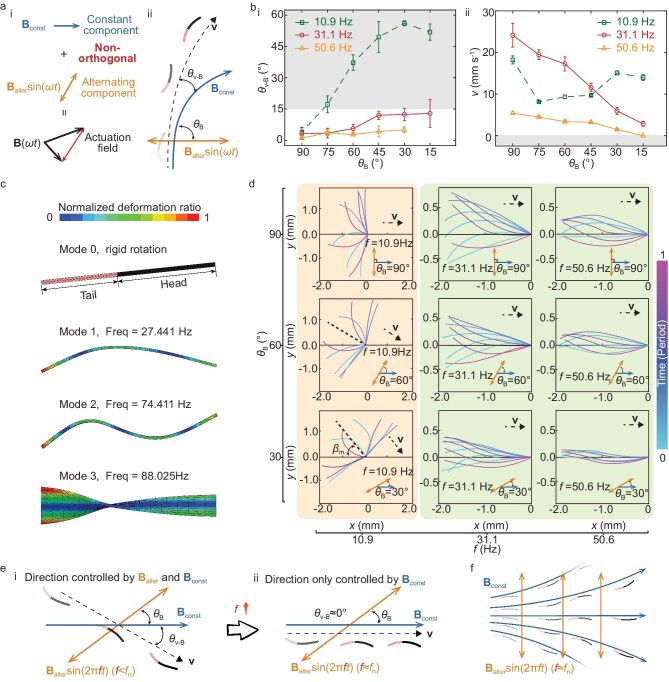 Figure 4
Figure 4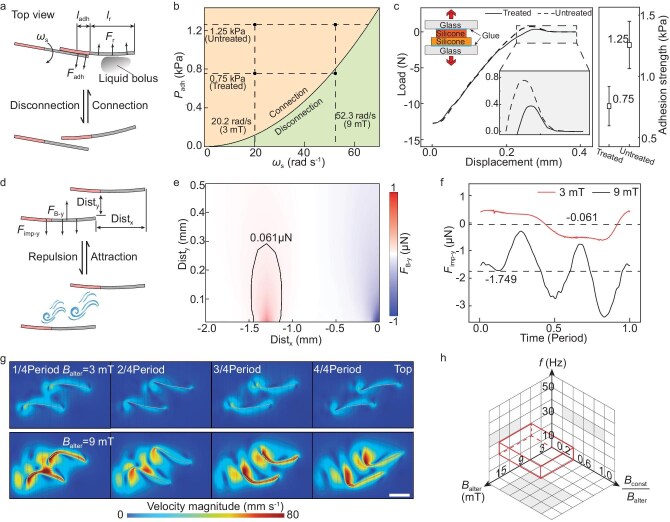 Figure 5
Figure 5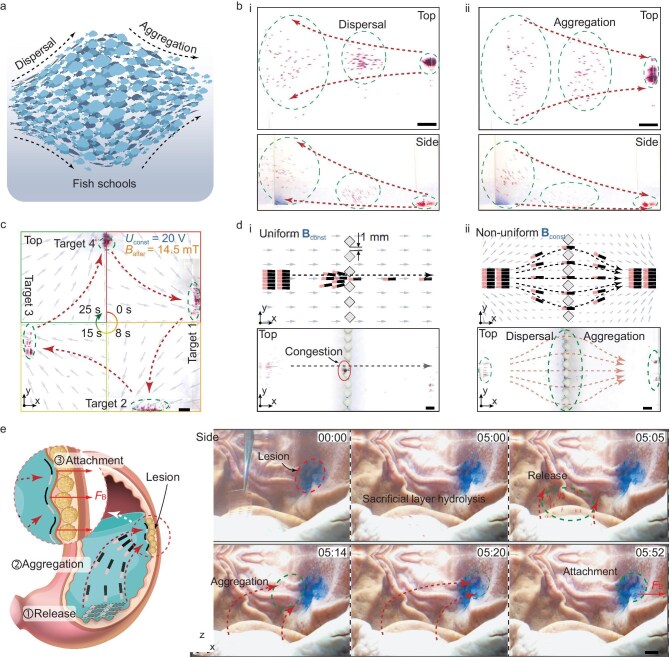 Figure 6
Figure 6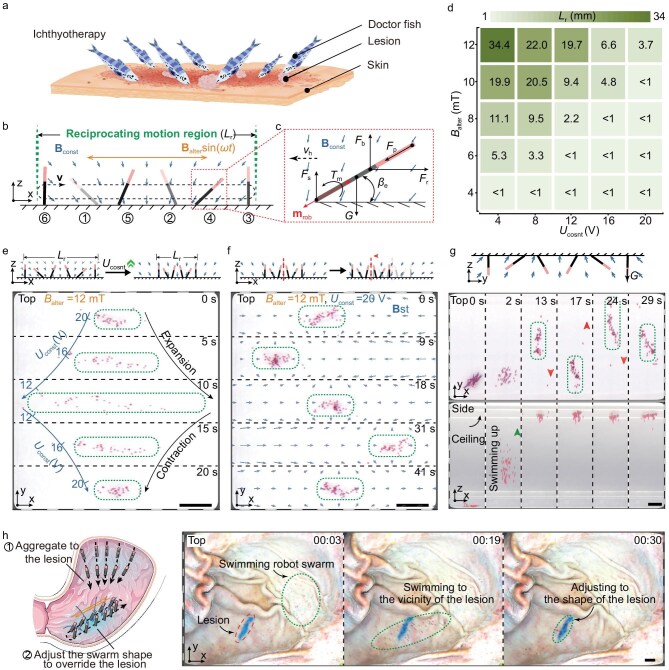 Figure 7
Figure 7Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsMicro and Nano Robotics · Characterization and Applications of Magnetic Nanoparticles · Pickering emulsions and particle stabilization