Partner-sourced haptic feedback rather than environmental inputs drives coordination improvement in human dyadic collaboration
Yiming Liu, Raz Leib, William Dudley, Ali Shafti, A. Aldo Faisal, David W. Franklin

TL;DR
This study shows that haptic feedback from a partner, not the environment, improves coordination in collaborative tasks.
Contribution
The study introduces a novel complex task to explore how partner-sourced haptic feedback enhances coordination in dyadic collaboration.
Findings
Partner-sourced haptic feedback significantly improves interpersonal coordination.
Participants naturally adopt leader-follower roles regardless of haptic condition.
Leadership dynamics evolve differently depending on the haptic feedback source.
Abstract
Haptic communication is a critical communication channel in physical collaboration. However, most studies focus on simplistic tasks with predetermined solutions, restricting the exploration of collaborative behaviors. In this study, we designed a complex task derived from the classic ball-beam control problem, requiring pairs of participants to collaboratively control an unstable object with internal degrees of freedom. The task’s redundant nature allowed diverse strategies and collaboration patterns to emerge. We systematically examined the impact of different sources of haptic feedback, distinguishing between forces arising from the collaborator’s actions and forces arising from the task dynamics. Participants collaborated across five haptic feedback conditions: full haptics, partner only, environment only, no haptics, or unrelated haptics. Haptic feedback significantly enhanced…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
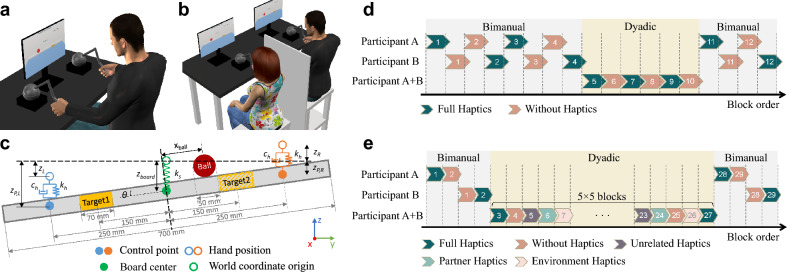 Figure 1
Figure 1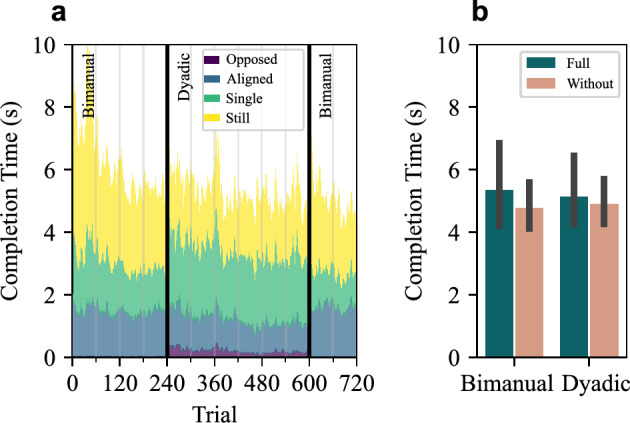 Figure 2
Figure 2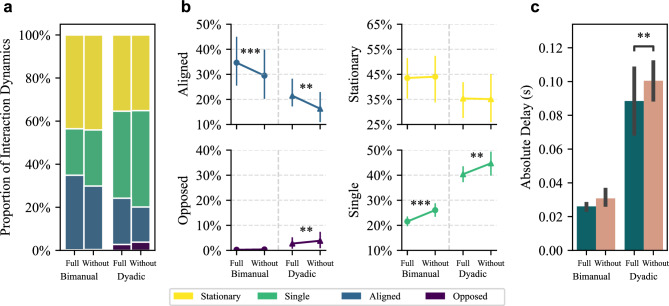 Figure 3
Figure 3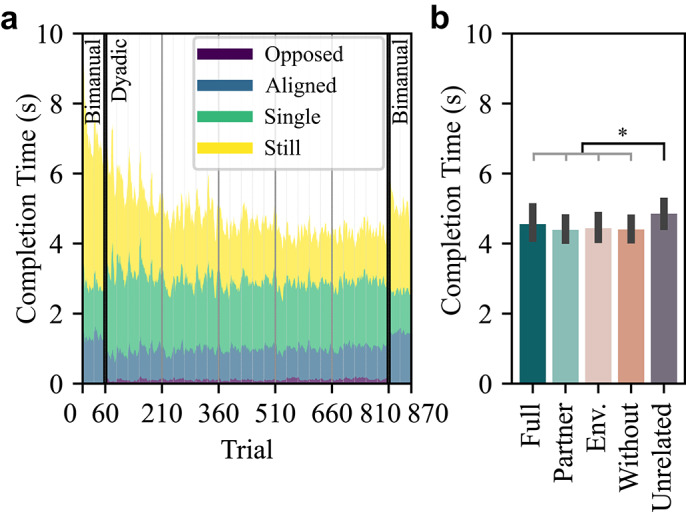 Figure 4
Figure 4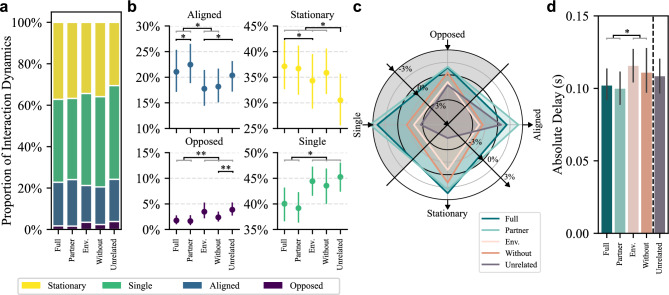 Figure 5
Figure 5 Figure 6
Figure 6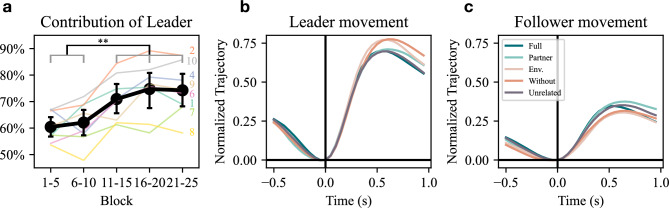 Figure 7
Figure 7 Figure 8
Figure 8Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsTeleoperation and Haptic Systems · Action Observation and Synchronization · Motor Control and Adaptation