{MFPP(R). An R package for matrix-based flexible project planning
Zsolt Tibor Kosztyán, Aamir Saghir, Bálint Blaskovics, Zsolt Tibor Kosztyán, Ágoston Kolos, Zsolt Tibor Kosztyán, Shan Jayasinghe, Zsolt Tibor Kosztyán

TL;DR
The paper introduces an R package called mfpp for flexible project planning and scheduling, filling a gap in supporting agile and hybrid project management approaches.
Contribution
The novel contribution is the development of the mfpp R package for matrix-based flexible project planning and scheduling.
Findings
The mfpp package provides tools for both traditional and flexible project planning.
The package is demonstrated through practical examples to illustrate its use.
No existing R package was found to support flexible project planning before this work.
Abstract
Project planning and scheduling are essential parts of project management. While project planning and scheduling tools are already available to support traditional project management approaches, flexible project management, such as agile, extreme and hybrid project planning, are only somewhat supported by computer algorithms. To the best of our knowledge, no existing R package for project planning and scheduling can support project planning and scheduling for flexible projects. In this paper, the goal is to fill this gap; to this end, the R package mfpp for matrix-based flexible project planning/scheduling is introduced and described. This package includes a comprehensive set of tools for project managers to schedule both traditional and flexible project plans. The use of the package is illustrated through examples.
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
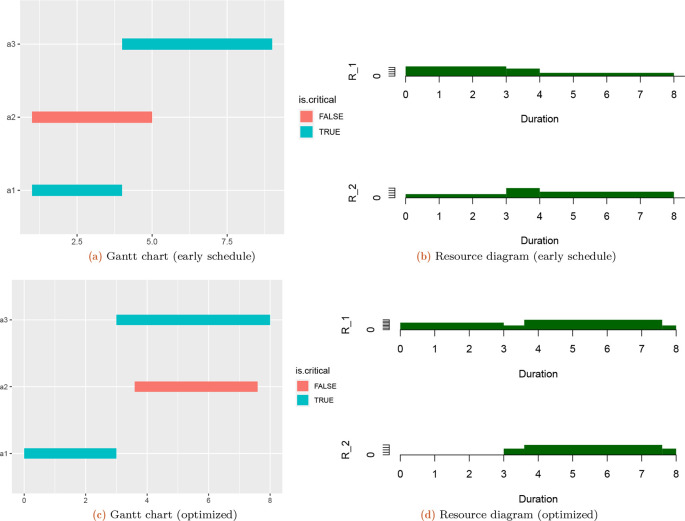 Figure 1
Figure 1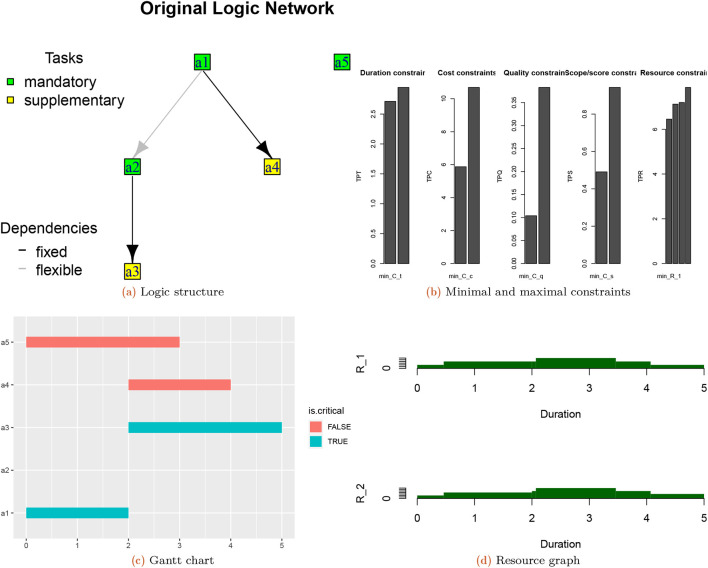 Figure 2
Figure 2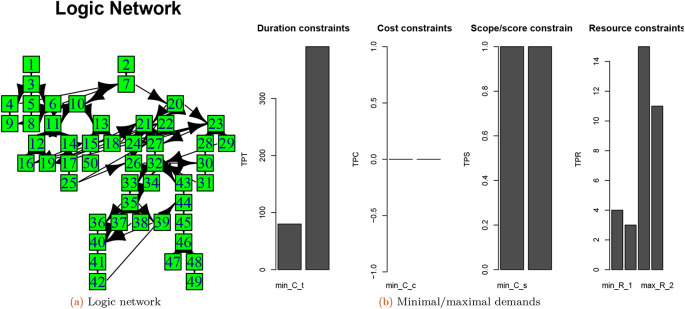 Figure 3
Figure 3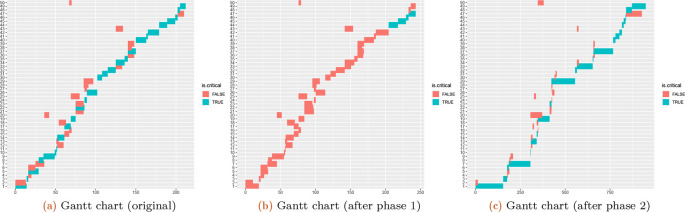 Figure 4
Figure 4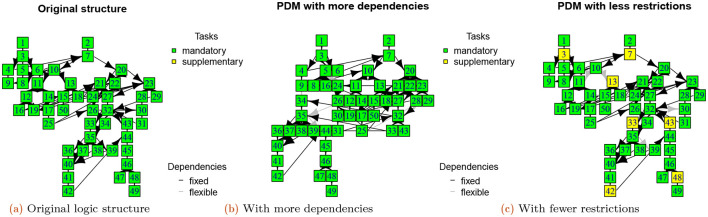 Figure 5
Figure 5| Approaches | Project structure | New tasks | Multiple modes |
|---|---|---|---|
| Traditional (TPMa) | Fixed | Not allowed | Handled |
| Agile (APMa) | Flexible | Not allowed | Not handled |
| Extreme (XPMa) | Flexible | allowed | Not handled |
| Hybrid (HPMa) | Flexible | Allowed | Handled |
| Function | Description |
|---|---|
| generatepdm | Generates the project domain matrix (PDM) for a flexible project planning problem |
| get.structures | Calculates the minimal/maximal/most likely project structures |
| is.flexible | Checks the flexibility of the project data matrix |
| maxscore_PEM | Calculates the maximal score value (PMAX) of possible project scenarios |
| minscore_PEM | Calculates the minimal score value of possible project scenarios |
| paretores | Calculates the Pareto-optimal resource allocation |
| Percent | Calculates the desired project completion characteristic of a project structure |
| phase1 | Simulates estimation uncertainty |
| phase2 | Simulates shock effects |
| phase3 | Simulates the effects of a change in customer claims |
| plot.mfpp | Plotting function for matrix-based flexible project planning |
| summary.mfpp | Prints project data matrix constraints, matrices, lists, sets, etc. |
| Tpc | Calculates the cost demands of a project |
| Tpq | Calculates the total project quality for a project structure |
| Tpr | Calculates the maximum resource demands of a project |
| Tpt | Evaluates the activity times(early start time, early finish time, late start time and late finish time) of a project |
| truncpdm | Function for dropping excluded tasks |
- —Ministry of Culture and Innovation of Hungary from the National Research, Development and Innovation Fund
- —Ministry of Culture and Innovation of Hungary from the National Research, Development and Innovation Fund
Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsResource-Constrained Project Scheduling · Product Development and Customization · Manufacturing Process and Optimization
Motivation and significance
Network planning methods are the main methods used to plan and schedule projects. ^ 1 ^ Among traditional methods, (a) the critical path method ^ 2 ^ and the metra potential method (or the precedence diagramming method) ^ 3 ^ can only handle tasks of a given duration, while (b) the program (or project) evaluation and review technique can handle stochastic activity durations, ^ 4 ^ while the graphical evaluation and review techniques can also handle decision events. ^ 5 ^ However, these methods were developed for the scheduling of traditional projects; consequently, for product or software development projects, they can be used only partially or not at all because these network planning methods cannot handle the specifics of these projects. ^ 6 ^ ^,^ ^ 7 ^ One of the main shortcomings of traditional network-based project planning techniques is that either the logic structure is static or a limited number of possible alternatives for completion sequences must be predefined. ^ 8 ^ In contrast, in cases of flexible project management, such as agile, extreme, or hybrid project management, the structure is not predefined. Instead, the real structure is determined by the decision of the customer-developer. In such flexible approaches, task completion is prioritized by customers’ claims. From the technological perspective, parallel and sequential completion can be allowed to handle flexible dependencies. ^ 9 ^ In addition, structural flexibility, which is a requirement in both the agile and extreme project management approaches is necessary to handle new non-planned tasks, while the hybrid project management approach requires that the features of the traditional, agile, and, if necessary, extreme project management approaches be combined. ^ 10 ^
In terms of scheduling, traditional time cost trade-off problems ^ 11 ^ ^,^ ^ 12 ^ support the traditional project management approach (TPMa) and are generally not or only minimally considered in the agile project management approach (APMa). In addition, other flexible approaches, such as the extreme project management approach (XPMa), allow for new unplanned tasks in response to changes in customer desires. The approach that has most recently begun to be explored is the hybrid project management approach (HPMa), which has a flexible structure but allows the application of traditional trade-off methods and/or multimode task completion (or alternative technologies). These approaches are detailed from the scheduling perspective in Table 1. ^ 13 ^
Table 1.: Comparison of various traditional and flexible project management approaches [source: Ref. 13].
Flexible project planning approaches, such as APMa, HPMa, and XPMa, are very popular in software project planning. However, these approaches still lack algorithmic and software support for project scheduling. In answer to this, ^ 13 ^ developed the mfpp package in MATLAB (RRID:SCR_001622) to fill this gap, but this software is not free.
To the best of our knowledge, there are three packages in R (RRID:SCR_001905) available for project management. Among these, PlotPrjNetworks ^ 14 ^ and plan ^ 15 ^ are packages that create a Gantt diagram for the visualization of the project structure, while ProjectManagement ^ 16 ^ is a useful tool for managing a project from its development to its execution based on the TPMa. However, an R package that can manage a project based on APMa, XPMa, and HPMa is lacking. This is an important gap to fill for project planning/scheduling practitioners. Such a package would be useful to the user community because it could be integrated with other tools developed in R, meaning that it could be easily modified to suit the specific needs of each user and could be wrapped into a graphical interface.
Matrix-based techniques can be used instead of traditional network-based project planning techniques to model all types of changes in customer demands (such as new tasks and/or new subprojects) and parameters (such as time/cost/resource demands). Such methods have been successfully used to model agile projects. ^ 17 ^ The basis of a flexible matrix-based project planning method is a project domain matrix (PDM) ^ 17 ^ with unplanned tasks. The PDM is a matrix by , where is the number of planned tasks, is the number of unplanned tasks, , is the number of possible completion modes and is the number of possible resources. The PDM has five domains. The first domain is the logic domain (LD), which is described as an by project expert matrix (PEM), ^ 18 ^ a kind of numerical dependency structure matrix (NDSM). ^ 19 ^ The other domains are the time domain (TD) and the quality domain (QD), which are by submatrices, and the resource domain (RD), which is an by submatrix. The LD and QD contain real values between 0 and 1, while the TD, cost domain (CD), and RD contain nonnegative real values.
In this paper, we introduce mfpp, a new R package that provides the necessary tools to manage both traditional and flexible project plans. This package can be used to build matrix-based projects and calculate their demands, generate a flexible project network, and perform uncertainty analysis. The proposed package is an R version of the MATLAB functions (i.e. MATLAB functions from a previous study done by the author ^ 13 ^).
Software description
mfpp is a new R package for project managers to schedule traditional and flexible project plans. In addition, it compares different project management approaches with respect to their scheduling performance and risk mitigation to help decision makers choose the best project management approach. Additionally, in the case of analyzing project libraries, scholars can analyze the various project management approaches and their resilience to risks. This package uses existing R packages Matrix, ^ 20 ^ pracma ^ 11 ^ and Rfast ^ 21 ^ to generate the PDM and calculate project values; the packages genalg ^ 22 ^ and nsga2R ^ 23 ^ for optimized resource allocation; and the ggplot2 ^ 24 ^ and igraph ^ 25 ^ to plot the project structure. The mfpp package is available for download from CRAN and Code Ocean. ^ 26 ^ A summary of the functions incorporated into this package is provided in Table 2.
Databases related to project management
Two project databases are directly included in this package. The first is the ^ 27 ^ database, which contains 240 simulated projects, all of which include four completion modes. This database can be used to test algorithms for the multimode resource-constrained project scheduling problem (MM-RC-PSP). The second database is provided by ^ 28 ^ and contains 125 real projects. These projects each include only one completion mode, but they also include the cost demands of the tasks.
Use cases
The implementation of the R package mfpp is demonstrated using (i) simulated project structures and (ii) a real-life data set of project structures. The package must be loaded at the beginning of the session by typing the following:
install.packages("mfpp") # Install mfpp package, if it is required library(mfpp)
Simulated project structures
Build fixed matrix-based projects and calculate their demands to support TPMa
We start with the tpt function of the mfpp package to build fixed matrix-based projects and calculate their demands to support the TPMa. The LD specifies the structure of the project. The LD is an N-by-N (sub)matrix, where N is the number of tasks. The diagonal values represent the task priorities for task completion, where a value of 1 indicates a mandatory task, and a lower value indicates a supplementary task. The off-diagonal values represent the dependencies between tasks, where a value of 1 indicates a fixed dependency, and lower values indicate flexible dependencies between tasks. In the case of an acyclic graph, the LD can be reordered as an upper triangular matrix, which is assumed in this package. In the following example, a binary logic plan with one completion mode is specified. The tpt function determines the duration of the project (total project time, TPT) by calculating the task schedule, including time specifications such as the early start time (EST), early finish time (EFT), late start time (LST), late finish time (LFT), scheduled start time (SST), and scheduled finish time (SFT) for each task. The plot function draws a Gantt chart for ESTs, LSTs, or SSTs. The LD and TD must be specified as necessary and sufficient arguments for this function. The output of the function is as follows:
LD<-rbind(c(1,0,1), c(0,1,0), c(0,0,1)) colnames(LD)<-rownames(LD)<-paste("a",1:3,sep = "") TD<-c(3,4,5) TPT<-tpt(LD,TD) summary(TPT)
Table of schedule
Dur EST EFT LST LFT TF SST SFT SF Is.Crit
a1 3 0 3 0 3 0 0 3 0 TRUE
a2 4 0 4 4 8 4 0 4 4 FALSE
a3 5 3 8 3 8 0 3 8 0 TRUE
SST <- c(1,1,0) TPT<-tpt(LD,TD,SST) summary(TPT)
Table of schedule
Dur EST EFT LST LFT TF SST SFT SF Is.Crit
a1 3 0 3 0 3 0 1 4 –1 TRUE
a2 4 0 4 4 8 4 1 5 3 FALSE
a3 5 3 8 3 8 0 4 9 –1 TRUE
The plot of the schedule can be drawn as follows ( Figure 1(a)):
The scheduled Gantt chart and resource diagram for a binary logic plan with one completion mode.The total project resources based on two resources domains (R 1 and R 2) extracted through mfpp package.
Next, we illustrate the use of the tpc, tpq and tpr functions to calculate the total project cost, the total project quality, and the total project resources. The tpr function calculates the maximal resource demands and can specify a resource graph. In these functions, the CD and QD are N-by-w matrices, while the RD is an N-by- matrix, where r is the number of resources. The CD is mandatory, while the QD and RD are optional matrices. The necessary arguments of these functions are the LD, CD, quality parameters (q), QD with completion modes, and RD. The output of this function for the given example is as follows:
set.seed(6) CD<-c(10,20,24) cat("\nTotal Project Cost (TPC): ",tpc(LD,CD))
Total Project Cost (TPC): 54
q<-runif(3) cat("\nTotal Project Quality (TPC): ",tpq(LD,LD,q))
Total Project Quality (TPC): 0.5316529
QD2<-cbind(q,runif(3)) # Generate two completion modes cat("\nRelative TPQ: ",tpq(LD,LD,q,QD2))
Relative TPQ: 0.7169994
RD<-round(cbind(runif(3,min=0,max=5),runif(3,min=0,max=5))) cat("\n\nTotal Project Resources (TPR)\n\n")
Total Project Resources (TPR)
tpr(TPT$SST,LD,TD,RD)
R_1 R_2
TPR 9 8
A plot of the total project resources can be called with the additional argument “res.graph=TRUe”, and the output is seen in Figure 1(b).
tpr(TPT$SST, LD, TD, res.graph = TRUE)
R_1 R_2
TPR 9 8
Optimizing resource allocation is a combinatorial (NP-hard) problem; therefore, a metaheuristic method is used to minimize the maximum resource demands. In this case, the nondominated sorting genetic algorithm II (NSGA-II) method is used to minimize the maximum resource demands. In the case of multiple resources, a Pareto-optimal solution is found. The paretores function can help a project engineer determine the minimal resource demands while maintaining a specified project duration. The output of this function is as shown in Figure 1(c) and in Figure 1(d).
The set of domains, namely, the set of the LD, TD and CD and optionally the QD and RD specifies the PDM. A logic network can be constructed using this set of domains as follows:
PDM<-cbind(LD,TD,CD,q,RD) class(PDM)<-"PDM_matrix" summary(PDM,w=1,Rs=2)
summary PDM matrix:
a1 a2 a3 TD CD q
a1 1 0 1 3 10 0.6062683 5 0
a2 0 1 0 4 20 0.9376420 4 3
a3 0 0 1 5 24 0.2643521 3 5
attr(,"class")
[1] "PDM_matrix"
Minimal constraints:
Summary of the PDM constraints structure:
Time constraint (Ct): 8
Const constraint (Cc): 54
Score/scope constraint (Cs): 1
Quality constraint (Cq): 0.5316529
Maximal constraints:
Summary of the PDM constraints structure:
Time constraint (Ct): 8
Const constraint (Cc): 54
Score/scope constraint (Cs): 1
Quality constraint (Cq): 0.5316529
Resource constraint(s) (CR):
R_1 R_2
TPR 9 8
Generation of a flexible project network to support the HPMa
The HPMa combines the features of the TPMa (multiple completion modes), APMa (a flexible project structure), and XPMa (new, unplanned tasks). Project plans to support the HPMa can also be designed using the proposed mfpp package. For this purpose, the first function that is needed is generatepdm. The input arguments of this function are the number of tasks (N); the flexibility factor (ff); the connectivity factor (cf); the maximum values of the TD (mTD), CD (mCD), RD (mRD); the number of modes (w); the number of resources (nR); the number of possible extra tasks (nW); and the scale and QD of the project scenario. The function returns either the PDM only or a PDM list that also contains the number of completion modes (w) and the number of resources (Rs). Consider a flexible plan with 4 planned tasks, 2 completion modes and 2 resources. The project schedule generated using the HPMa is as follows:
# Generation of PDM matrix for flexible project planning MFPP package.
# Define number of modes, flexibility factor and connectivity factor of a project scenario. N=5;ff=0.30;cf=0
# Define maximum value of time domain, cost domain and resource domain of a project scenario. mTD=3;mCD=4;mRD=3
# Define number of modes, number of resources, number of possible extra tasks (nW), scale and*# quality domain of a project scenario.*
w=2;nR=2;nW=1 scale=1.6 PDM<-generatepdm(N,ff,cf,mTD,mCD,mRD,w,nR,nW,scale,QD=TRUE,lst=TRUE) rownames(PDMPDM)[1:(N+nW)]<-paste("a",1:(N+nW),sep="")
summary(PDM) # Summary of PDM list
summary PDM list:
Number of completion modes (w): 2
Number of resources (Rs): 2
summary PDM matrix:
a1 a2 a3 a4 a5 a6 t_1 t_2 c_1
a1 1 0.6348251 0.0000000 1.0000000 0 0 1.8922066 2.206381 2.9384623
a2 0 1.0000000 1.0000000 0.0000000 0 0 0.1397774 0.160757 0.5917513
a3 0 0.0000000 0.9458257 0.0000000 0 0 2.7119461 2.784497 3.1012793
a4 0 0.0000000 0.0000000 0.7420972 0 0 1.8202474 1.896929 0.5478731
a5 0 0.0000000 0.0000000 0.0000000 1 0 2.6490032 2.922064 2.3434704
a6 0 0.0000000 0.0000000 0.0000000 0 0 0.0000000 0.000000 0.0000000
c_2 q_1 q_2 r_1.1 r_2.1 r_1.2 r_2.2
a1 2.9456676 0.4591163 0.4597432 1.7602166 1.767857 0.7749634 0.8299197
a2 0.7051308 0.2476199 0.2898660 0.9645262 1.109172 1.9847076 2.0104963
a3 3.8735180 0.3979600 0.4327975 2.3338386 2.723688 2.3193125 2.3997095
a4 0.6072272 0.2989701 0.3343502 1.8691629 2.192587 2.5611961 2.9716221
a5 2.5560046 0.4891549 0.5480301 2.2484773 2.280209 2.2384662 2.4961772
a6 0.0000000 0.0000000 0.0000000 0.0000000 0.000000 0.0000000 0.0000000
attr(,"class")
[1] "PDM_matrix"
Minimal constraints:
Summary of the PDM constraints structure:
Time constraint (Ct): 2.711946
Const constraint (Cc): 5.873684
Score/scope constraint (Cs): 0.4907664
Quality constraint (Cq): 0.1039251
Maximal constraints:
Summary of the PDM constraints structure:
Time constraint (Ct): 2.945254
Const constraint (Cc): 10.68755
Score/scope constraint (Cs): 0.9427112
Quality constraint (Cq): 0.3830448
Resource constraint(s) (CR):
R_1 R_2
TPR 7.196484 7.867509
The main components of flexible project structures can be drawn using the plot function of the mfpp package, where these structures are defined as follows.
Minimal structure: This structure contains only mandatory tasks and fixed dependencies. It provides the lowest quality, cost, and time demands when the lowest quality, lowest cost, and shortest completion modes are specified for each task.
Maximal structure: This structure contains both mandatory and supplementary tasks as well as both fixed and flexible dependencies. It provides the highest quality, greatest cost, and greatest time demands when the highest quality, greatest cost, and longest completion modes are specified for each task.
Minimax structure: This structure contains only mandatory tasks but both fixed and flexible dependencies. It can provide the lowest resource demands.
Maximin structure: This structure contains both mandatory and supplementary tasks, but only fixed dependencies. It can provide the greatest resource demands.
Most-likely structure: Rounding the values of the LD yields the most-likely structure. The plot of the PDM structure is as follows in Figure 2(a):
Logic structure (a), minimal and maximal constraints (b) of the hybrid-project; Gantt chart (c) and Resource graph (d) of optimal schedule for completion mode 1.
The plot of the constraints is as follows in Figure 2(b). The most likely/most desired structures of the project for multiple modes can be determined using mfpp. The input and output are as follows:
PSM_list<-get.structures(PDM,type = "most")$moststruct summary(PSM_list)
summary PDM list:
Number of completion modes (w): 2
Number of resources (Rs): 2
summary PDM matrix:
a1 a2 a3 a4 a5 a6 t_1 t_2 c_1 c_2 q_1 q_2
a1 1 1 0 1 0 0 1.8922066 2.206381 2.9384623 2.9456676 0.4591163 0.4597432
a2 0 1 1 0 0 0 0.1397774 0.160757 0.5917513 0.7051308 0.2476199 0.2898660
a3 0 0 1 0 0 0 2.7119461 2.784497 3.1012793 3.8735180 0.3979600 0.4327975
a4 0 0 0 1 0 0 1.8202474 1.896929 0.5478731 0.6072272 0.2989701 0.3343502
a5 0 0 0 0 1 0 2.6490032 2.922064 2.3434704 2.5560046 0.4891549 0.5480301
a6 0 0 0 0 0 0 0.0000000 0.000000 0.0000000 0.0000000 0.0000000 0.0000000
r_1.1 r_2.1 r_1.2 r_2.2
a1 1.7602166 1.767857 0.7749634 0.8299197
a2 0.9645262 1.109172 1.9847076 2.0104963
a3 2.3338386 2.723688 2.3193125 2.3997095
a4 1.8691629 2.192587 2.5611961 2.9716221
a5 2.2484773 2.280209 2.2384662 2.4961772
a6 0.0000000 0.000000 0.0000000 0.0000000
attr(,"class")
[1] "PDM_matrix"
Minimal constraints:
Summary of the PDM constraints structure:
Time constraint (Ct): 2.851723
Const constraint (Cc): 9.522836
Score/scope constraint (Cs): 1
Quality constraint (Cq): 0.3665425
Maximal constraints:
Summary of the PDM constraints structure:
Time constraint (Ct): 2.945254
Const constraint (Cc): 10.68755
Score/scope constraint (Cs): 1
Quality constraint (Cq): 0.4025323
Resource constraint(s) (CR):
R_1 R_2
TPR 7.196484 7.867509
The optimal schedules for different completion modes can be calculated using the paretores and truncpdm functions by dropping excluded tasks and their demands. The optimal resource allocation can be calculated once the completion modes are selected for each task as follows:
# Get PSM matrix
# Drop excluded tasks, and their demands
PSM<-round(truncpdm(PSM_list$PDM))
w<-PSM_listw *# Get number of completion modes* Rs<-PSM_listRs # Get number of resurces
DSM<-PSM[,1:nrow(PSM)] # Get PSM matrix
# Get time demands (time domain, TD) TD<-PSM[,paste("t",1:w,sep = "_")]
# Get resource demands (resource domain, RD) RD<-PSM[,tail(colnames(PSM),w*Rs)]
# Calculate optimal schedules for both completion modes
RES1<-paretores(DSM,TD[,1],RD[,1:Rs]) RES2<-paretores(DSM,TD[,2],RD[,(Rs+1):(2*Rs)])
Figure 2(b) shows the Gantt chart and Figure 2(c) shows the resource graph of the optimal schedule for the completion mode 1.
Project structure database
In this section, Boctor’s publicly available ^ 27 ^ simulation database is used to demonstrate the applicability of mfpp. This database contains a collection of 240 projects with different names, numbers of completion modes (w) and numbers of resources (Rs). The details of the database can be retrieved using the summary function. However, we are using project number 2 within this database, whose details are as follows: name of project= boct10, w= 4 and Rs= 2. Any other project could also be used to obtain the optimal project structure and resources.
Obtaining a project structure from the collection
Figure 3(a) shows the original project structure and Figure 3(b) shows the minimal/maximal constraints of a project 2 from the Ref. 27’s project collection.
Logic network and minimal/maximal demands of project based on 4 completion mode using the Boctor database.
The Gantt charts of the selected project of completion mode 1 is constructed by extracting the PDM and TD as follows (see Figure 4(a)):
Gantt chart of the selected project for the 1st completion mode scheduled by early starting time (a); after varying project demands (b-c) (see phase 1 and phase 2).
Sensitivity analysis
For project risk analysis, one of the most frequently used methods is sensitivity analysis. The sensitivity analysis procedure in mfpp consists of three phases. Phase 1: Effects of uncertainty Phase 2: Effects of shocks Phase 3: Structural changes.
Notably, phase 1 and phase 2 involve varying the demands, while phase 3 varies the project structure. Phase 1 affects the entire project, while phase 2 and phase 3 affect only selected demands or structural elements. These phases can be performed in a sequential or parallel manner. The phases follow the logic of. ^ 10 ^ The mfpp package also analyzes the effects of uncertainty on the scheduled project using the phase1 and phase2 functions. Furthermore, the existing project plan can be modified to a flexible structure using the phase3 function of the developed package. These functions are also demonstrated on the selected project from the database.
Effects of uncertainty
Phase 1 serves to analyze the uncertainty of the estimation. Modified demands are generated in the interval of , where is the original value. The random generator can be specified to follow either a uniform (=default) or beta distribution. These modifications are applied to all kinds of demands for each task (compare Figures 4(a), 4(b), and 4(c)).
Effects of shocks
Phase 2 simulates shock effects, by increasing percent of the task demands by a factor of up to . Phase 2 investigates the effects of shocks, in which not all task demands are changed but the changes are significant (see Figure 4(b)).
Structural changes
In phase 3, percent of the nodes ( i.e., tasks) or arcs ( i.e., dependencies)are selected to change the corresponding scores by up to the maximal change effect . Phase 3 is simulates changes in customer priorities and technological changes. In the case of , the plan will be more flexible, whereas increases priorities and can produce new dependencies (compare Figures 5(a), 5(b), and 5(c)).
Logic network of the original structure (a), with more dependencies (b), and with fewer restrictions (c) (see phase 3 function).
Conclusions
The mfpp package has been developed to provide users with a comprehensive set of functions that can be used to create matrix-based models for both traditional and flexible project management approaches. The presented package also compares different project management approaches with respect to their scheduling performance and risk mitigation to help decision-makers choose the best project management approach. Moreover, in the case of analyzing project libraries, scholars can analyze various project management approaches and their resilience to risks. The mfpp tool can help decision-makers determine which approaches are best for their requirements.
The reference list from the paper itself. Each links out to its DOI / PubMed record.
- 1Guide A : Project management body of knowledge (pmbok guide). Project Management Institute. 2001;11:7–8.
- 2Kelley JE Jr Walker MR ; Critical-path planning and scheduling. Papers presented at the December 1-3, 1959, eastern joint IRE-AIEE-ACM computer conference. 1959; pp.160–173.
- 3Fondahl JW : A non-computer approach to the critical path method for the construction industry, Technical report. Transportation Research Boards;1962.
- 4Ray D Fulkerson. : Expected critical path lengths in pert networks. Oper. Res. 1962;10(6):808–817. 10.1287/opre.10.6.808 · doi ↗
- 5Alan A Pritsker B : Gert-graphical evaluation and review technique. Technical report. National Aeronautics and Space Administration;1966.
- 6Thamhain HJ ; Can we manage agile in traditional project environments? Proceedings of PICMET’14 Conference: Portland International Center for Management of Engineering and Technology; Infrastructure and Service Integration, IEEE. 2014; pp.2497–2505.
- 7Ahimbisibwe A Daellenbach U Cavana RY : Empirical comparison of traditional plan-based and agile methodologies: Critical success factors for outsourced software development projects from vendors’ perspective. J. Enterp. Inf. Manag. 2017;30(3):400–453. 10.1108/JEIM-06-2015-0056 · doi ↗
- 8Servranckx T Vanhoucke M : Strategies for project scheduling with alternative subgraphs under uncertainty: similar and dissimilar sets of schedules. Eur. J. Oper. Res. 2019;279(1):38–53. 10.1016/j.ejor.2019.05.023 · doi ↗