A Universal Tool Interaction Force Estimation Approach for Robotic Tool Manipulation
Diyun Wen, Jiangtao Xiao, Yu Xie, Tao Luo, Jinhui Zhang, Wei Zhou

TL;DR
This paper introduces a new method to estimate forces at the end of robotic tools in real time, improving precision and adaptability for different tools and grippers.
Contribution
A universal tool-end interaction force estimation approach using a dynamic model and spiking neural networks for real-time compensation of sensor uncertainties.
Findings
The method achieved root mean square errors below 0.5 N for force axes and 0.03 Nm for torque axes.
The approach was successfully applied to robotic scraper manipulation with precise and rapid interaction force feedback.
Abstract
The six-degree-of-freedom (6-DoF) interaction forces/torque of the tool-end play an important role in the robotic tool manipulation using a gripper, which are usually indirectly measured by a robot wrist force/torque sensor. However, the real-time decoupling of the tool’s inertial force remains a challenge when different tools and grasping postures are involved. This paper presents a universal tool-end interaction forces estimation approach, which is capable of handling diverse grippers and tools. Firstly, to address uncertainties from varying tools and grasping postures, an online-identifiable tool dynamics model was built based on the Newton–Euler approach for the integrated gripper–tool system. Sensor zero-drift caused by factors such as the tool weight and prolonged operation is incorporated into the dynamic model and identified online in real time, enabling a coarse estimation of…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
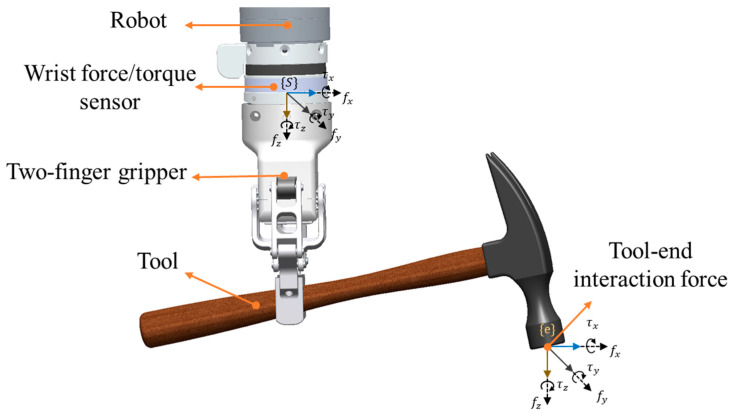 Figure 1
Figure 1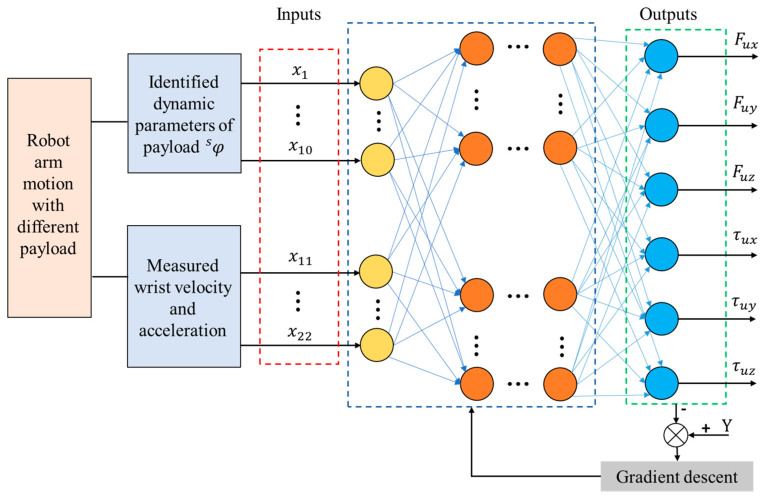 Figure 2
Figure 2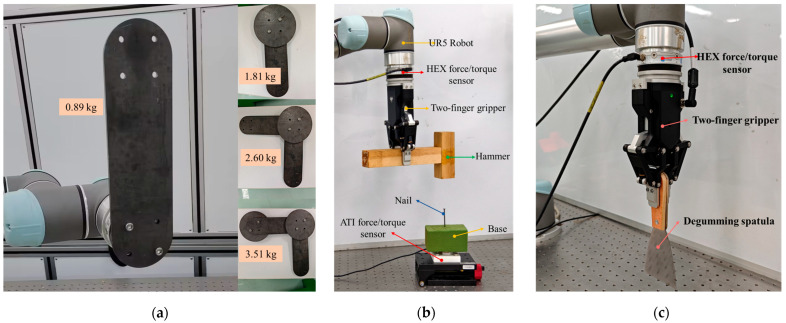 Figure 3
Figure 3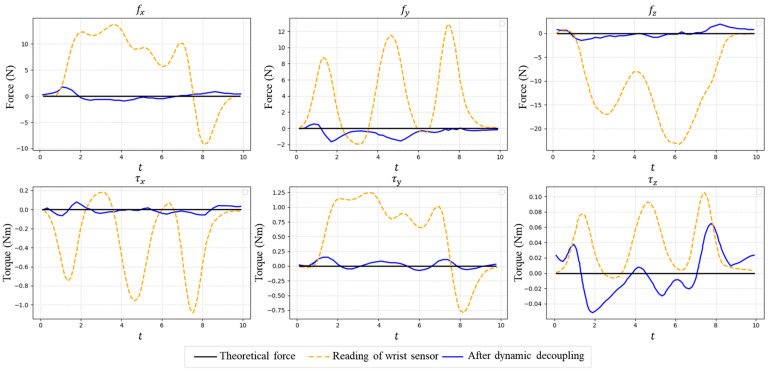 Figure 4
Figure 4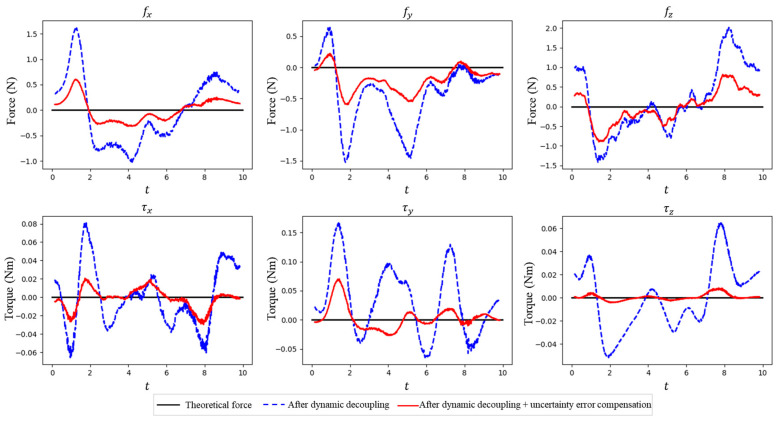 Figure 5
Figure 5 Figure 6
Figure 6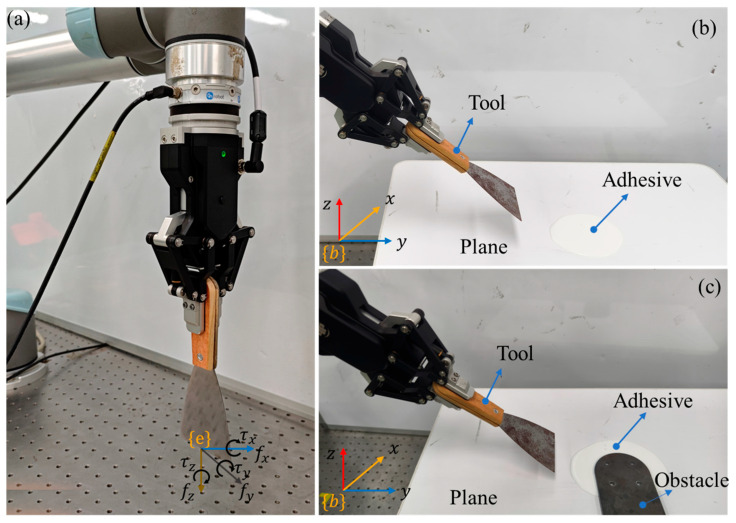 Figure 7
Figure 7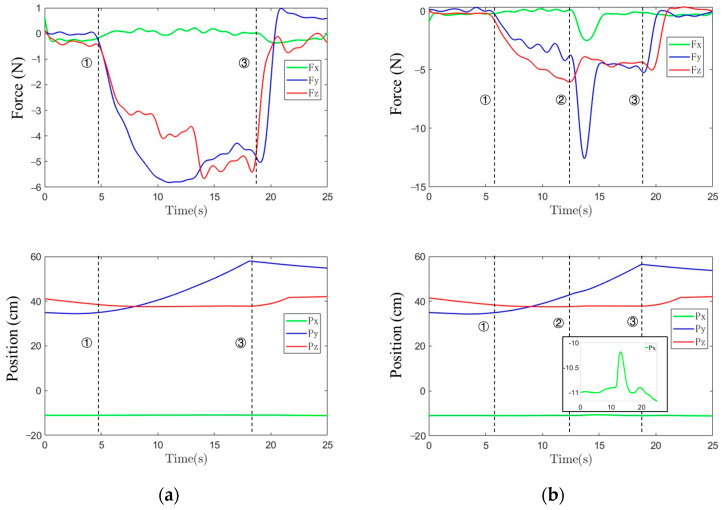 Figure 8
Figure 8Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobot Manipulation and Learning · Soft Robotics and Applications · Teleoperation and Haptic Systems