DPDQN-TER: An Improved Deep Reinforcement Learning Approach for Mobile Robot Path Planning in Dynamic Scenarios
Shuyuan Gao, Yang Xu, Xiaoxiao Guo, Chenchen Liu, Xiaobai Wang

TL;DR
This paper introduces DPDQN-TER, a new deep reinforcement learning method that improves mobile robot path planning in dynamic environments.
Contribution
The novel contribution is integrating Transformer-based sequence modeling with a multi-branch policy network and temporal-aware experience replay for better learning efficiency and stability.
Findings
DPDQN-TER outperforms benchmark algorithms in success rates, path lengths, and convergence speed.
The temporal-aware experience replay mechanism improves learning efficiency by capturing causal dependencies in state transitions.
Ablation studies confirm the effectiveness of both the Transformer-enhanced replay and multi-branch policy network.
Abstract
Efficient and stable path planning in dynamic and obstacle-dense environments, such as large-scale structure assembly measurement, is essential for improving the practicality and environmental adaptability of mobile robots in measurement and quality inspection tasks. However, traditional reinforcement learning methods often suffer from inefficient use of experience and limited capability to represent policy structures in complex dynamic scenarios. To overcome these limitations, this study proposes a method named DPDQN-TER that integrates Transformer-based sequence modeling with a multi-branch parameter policy network. The proposed method introduces a temporal-aware experience replay mechanism that employs multi-head self-attention to capture causal dependencies within state transition sequences. By dynamically weighting and sampling critical obstacle-avoidance experiences, this…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
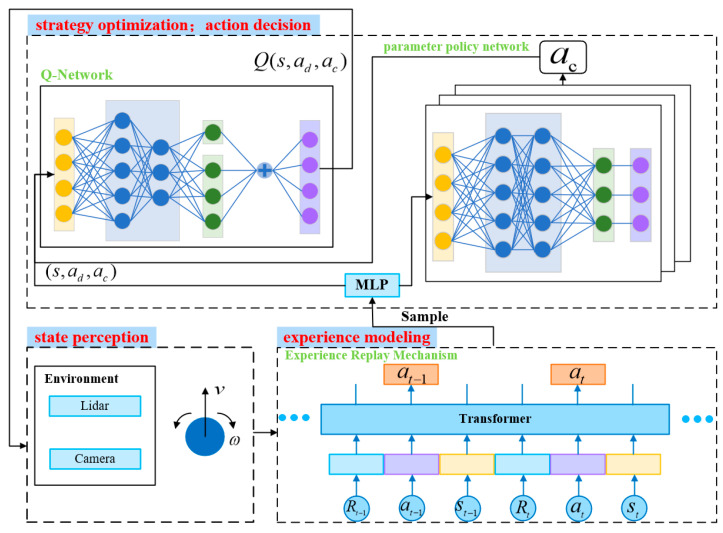 Figure 1
Figure 1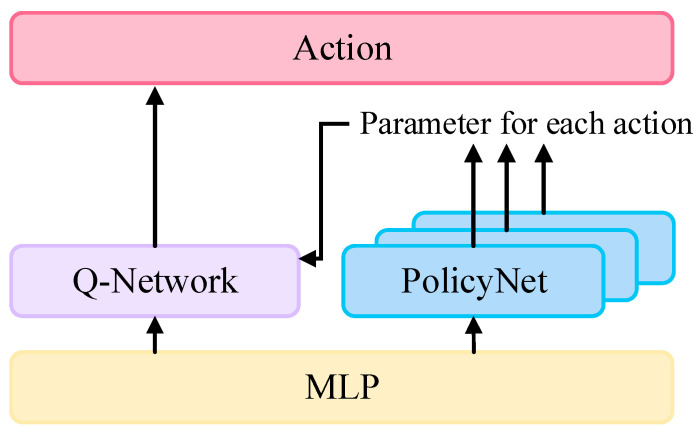 Figure 2
Figure 2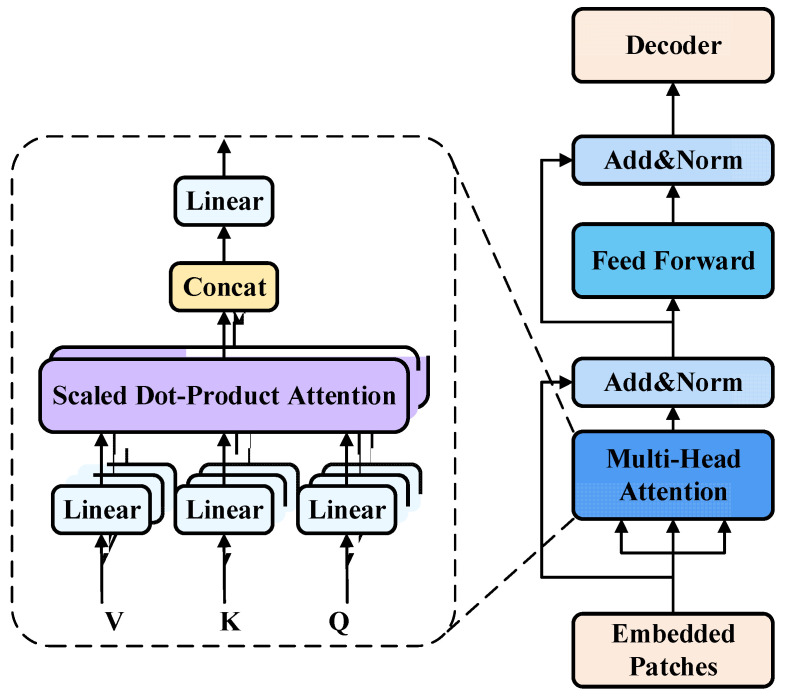 Figure 3
Figure 3 Figure 4
Figure 4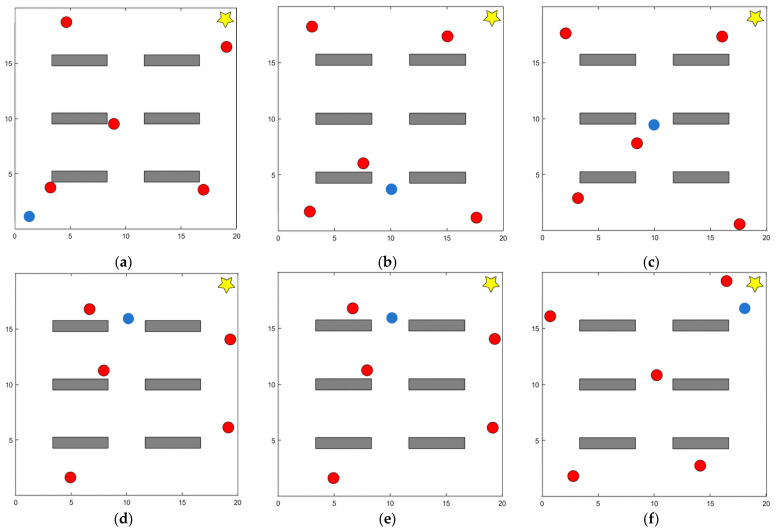 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotic Path Planning Algorithms · Reinforcement Learning in Robotics · Autonomous Vehicle Technology and Safety