LiDAR Point Cloud Colourisation Using Multi-Camera Fusion and Low-Light Image Enhancement
Pasindu Ranasinghe, Dibyayan Patra, Bikram Banerjee, Simit Raval

TL;DR
This paper introduces a system that colorizes LiDAR data using multiple cameras and works well in low-light conditions, useful for navigation and mapping.
Contribution
A hardware-agnostic, real-time pipeline for LiDAR colorisation with low-light enhancement and automatic calibration.
Findings
The system achieves full 360° real-time colorisation of LiDAR point clouds using multi-camera fusion.
Low-light image enhancement recovers scene details at 0.5 lx, comparable to well-lit conditions.
Automatic LiDAR–camera calibration eliminates the need for specialized calibration targets.
Abstract
What are the main findings? We developed an end-to-end pipeline combining multi-camera fusion with automated and targetless LiDAR–camera calibration to achieve full 360° real-time colourisation. Added colour correction and low-light enhancement modules recovered scene details at illumination as low as 0.5 lx, comparable to well-lit conditions. What is the implication of the main finding? A hardware-agnostic solution is provided for reliable monitoring and mapping in low-light environments, including underground mines and night-time navigation. Deployment is simplified with improvements for LiDAR interpretability for applications such as autonomous navigation, geological surveys, and vegetation analysis. In recent years, the fusion of camera data with LiDAR measurements has emerged as a powerful approach to enhance spatial understanding. This study introduces a novel,…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4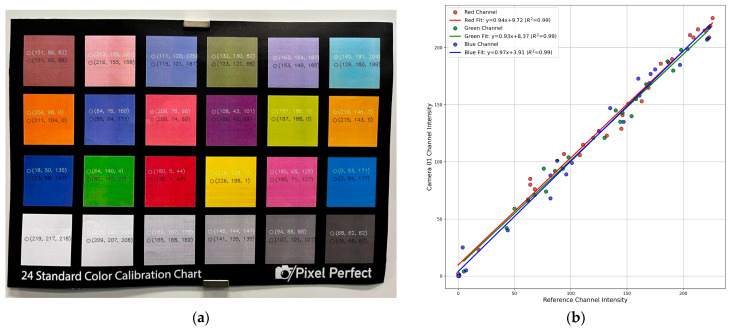 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8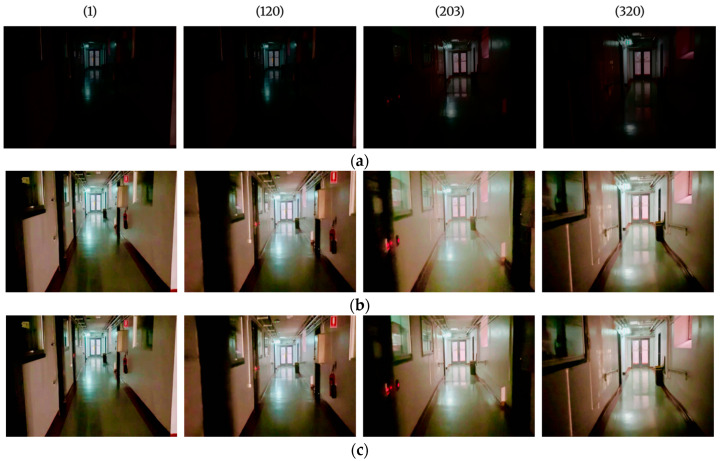 Figure 9
Figure 9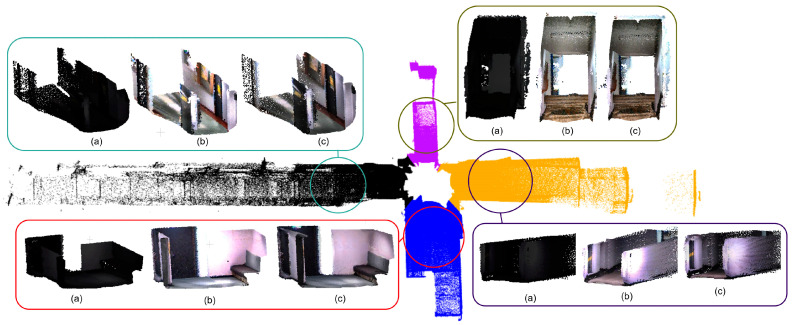 Figure 10
Figure 10Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRemote Sensing and LiDAR Applications · Robotics and Sensor-Based Localization · 3D Surveying and Cultural Heritage