Assessing User Experience with Piezoresistive Force Sensors: Interpreting Button Press Impulse and Duration
Carlos Gilberto Gomez-Monroy, Vicente Borja, Alejandro Ramirez-Reivich, Maria del Pilar Corona-Lira

TL;DR
This paper introduces a privacy-friendly method for measuring user experience with robots using physical button press data instead of intrusive methods like cameras or questionnaires.
Contribution
The study proposes a novel sensor-based UX assessment method using piezoresistive force sensors for embedded robotic systems.
Findings
Force and time data from button presses correlate with user experience ratings.
The method enables real-time and privacy-aware UX evaluation in human-robot interaction.
Bodily interaction metrics are shown to be a viable alternative to traditional UX assessment methods.
Abstract
As robotic systems become increasingly integrated into daily life, the need for user experience (UX) assessment methods that are both privacy-conscious and suitable for embedded hardware platforms has grown. Traditional UX evaluations relying on vision, audio, or lengthy questionnaires are often intrusive, computationally demanding, or impractical for low-power devices. In this study, we introduce a novel sensor-based method for assessing UX through direct physical interaction. We designed a robot lamp with a force-sensing button interface and conducted a user study involving controlled robot errors. Participants interacted with the lamp during a reading task and rated their UX on a 7-point Likert scale. Using force and time data from button presses, we correlated force and time data to user experience and demographic information. Our results demonstrate the potential of bodily…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
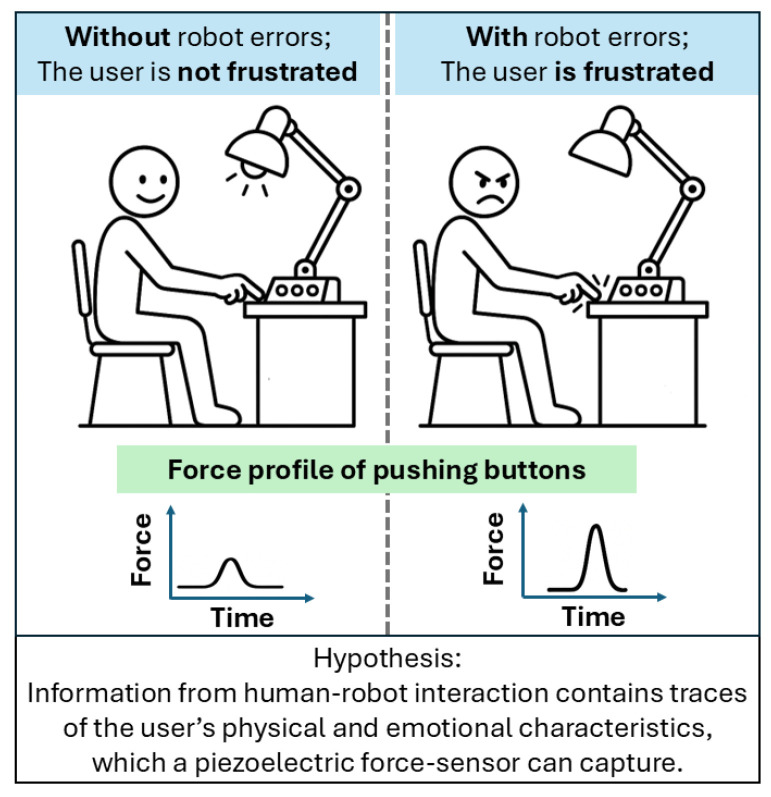 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4 Figure 5
Figure 5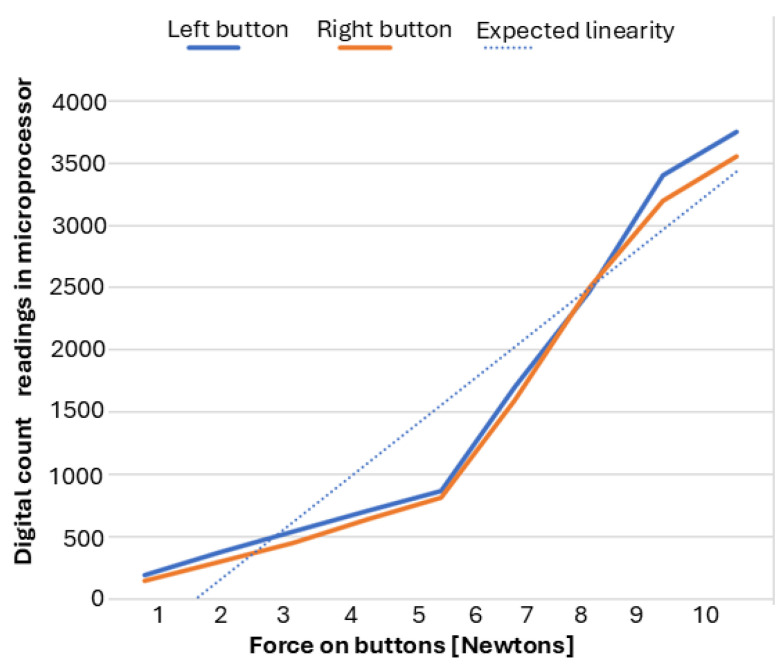 Figure 6
Figure 6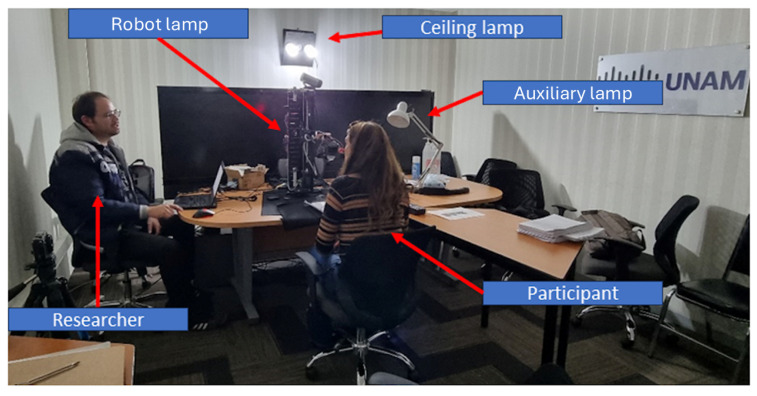 Figure 7
Figure 7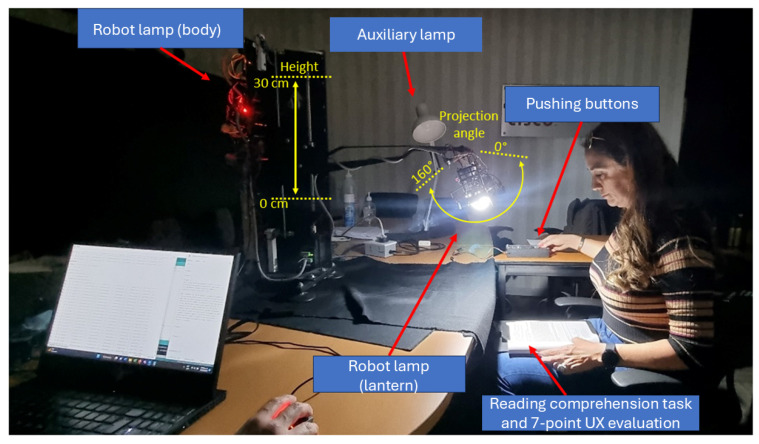 Figure 8
Figure 8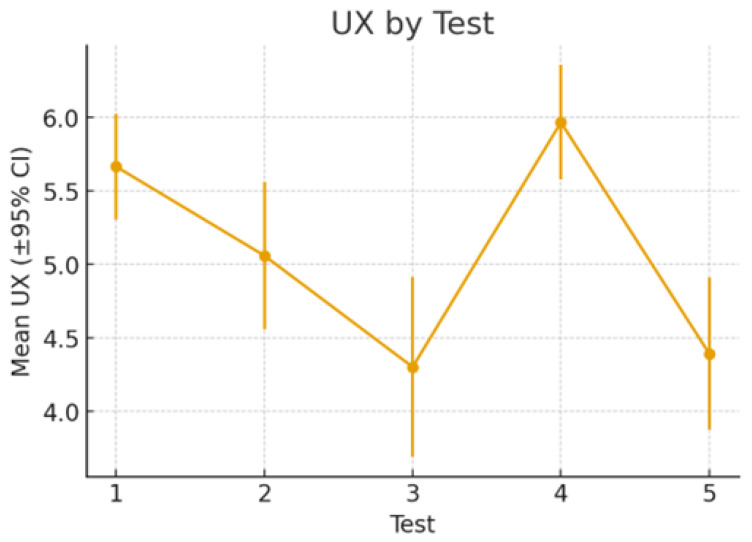 Figure 9
Figure 9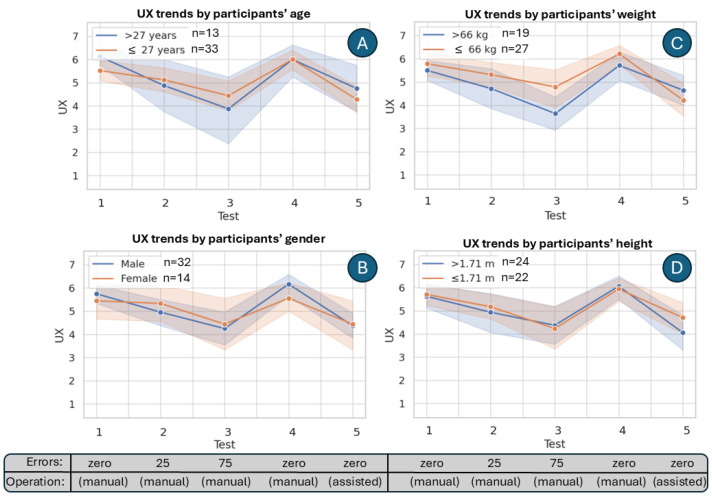 Figure 10
Figure 10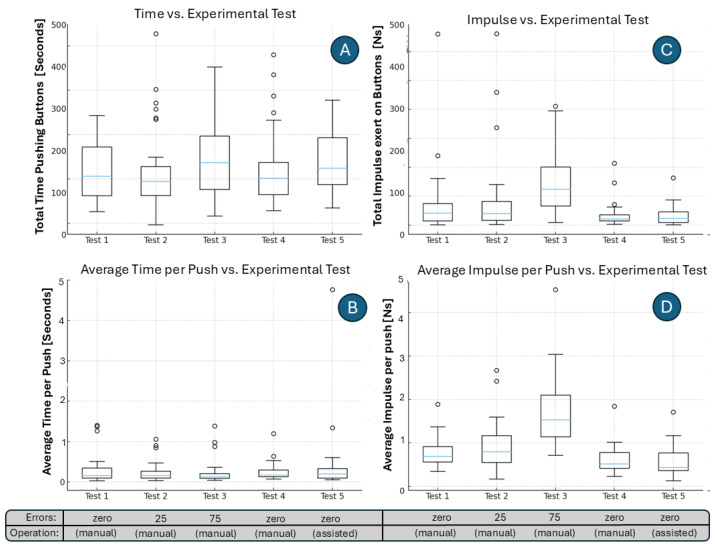 Figure 11
Figure 11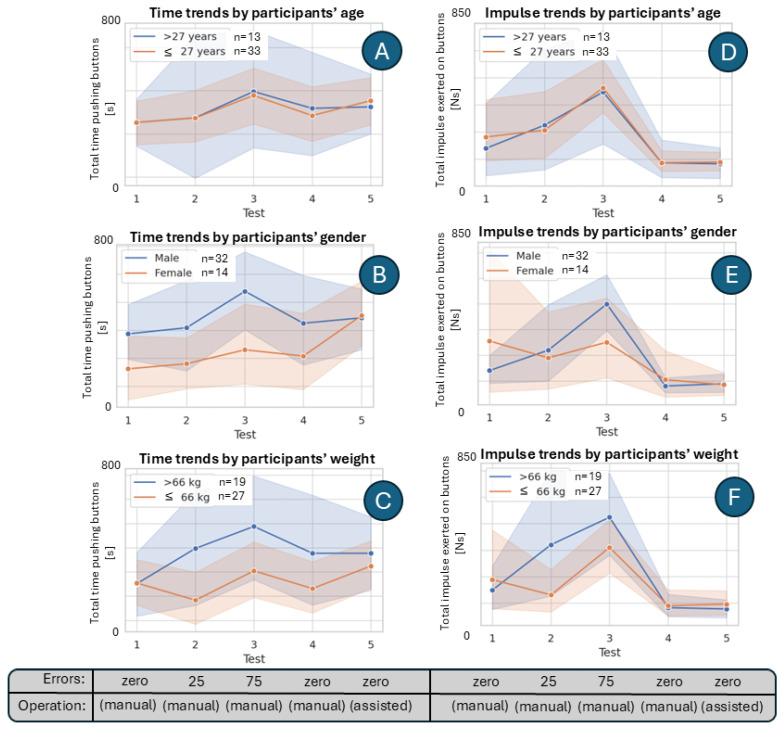 Figure 12
Figure 12Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsSocial Robot Interaction and HRI · Tactile and Sensory Interactions · Robot Manipulation and Learning