A Hierarchical Framework and Marginal Return Optimization for Dynamic Task Allocation in Heterogeneous UAV Networks
Anxin Guo, Zhenxing Zhang, Ao Wu, Qi Li, Leyan Li, Rennong Yang

TL;DR
This paper introduces a new framework and algorithm for coordinating different types of drones to efficiently complete complex tasks.
Contribution
The novel hierarchical framework and MRBHA algorithm improve dynamic task allocation in heterogeneous UAV networks.
Findings
MRBHA outperforms greedy and random assignment strategies by 14% and 77% in total mission value.
The framework effectively captures synergistic effects in multi-agent UAV collaboration.
The system is scalable and applicable to real-world scenarios like search-and-rescue and logistics.
Abstract
The coordination of heterogeneous Unmanned Aerial Vehicles (UAVs) for complex, multi-stage tasks presents a significant challenge in robotics and autonomous systems. Traditional linear models often fail to capture the emergent synergistic effects and dynamic nature of multi-agent collaboration. To address these limitations, this paper proposes a novel hierarchical framework based on a Mission Chain (MC) concept. We systematically define and model key elements of multi-agent collaboration, including Mission Chains (MCs), Execution Paths (EPs), Task Networks (TNs), and Solution Spaces (SSs), creating an integrated theoretical structure. Based on this framework, we formulate the problem as a Sensor–Effector–Target Assignment challenge and propose a Marginal Return-Based Heuristic Algorithm (MRBHA) for efficient dynamic task allocation. Simulations demonstrate that our proposed MRBHA…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1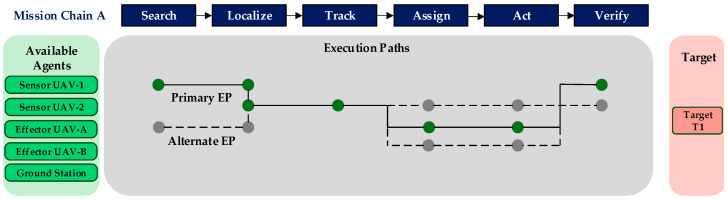 Figure 2
Figure 2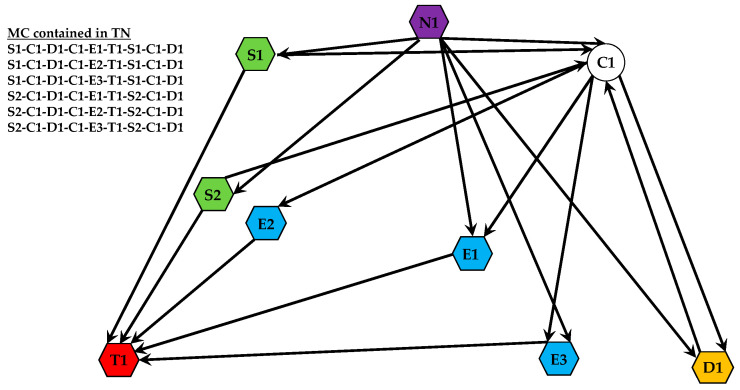 Figure 3
Figure 3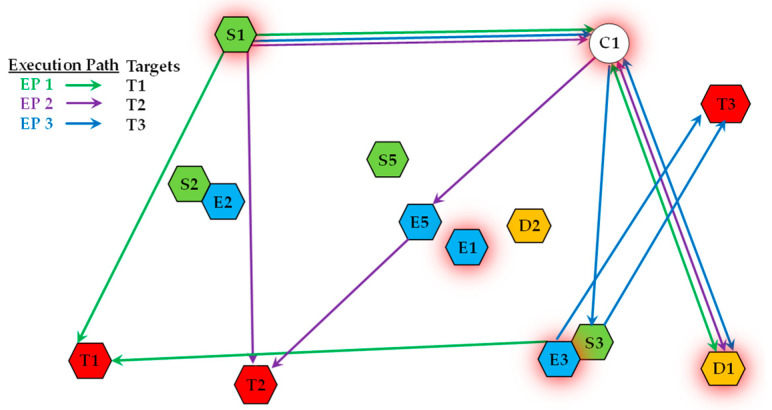 Figure 4
Figure 4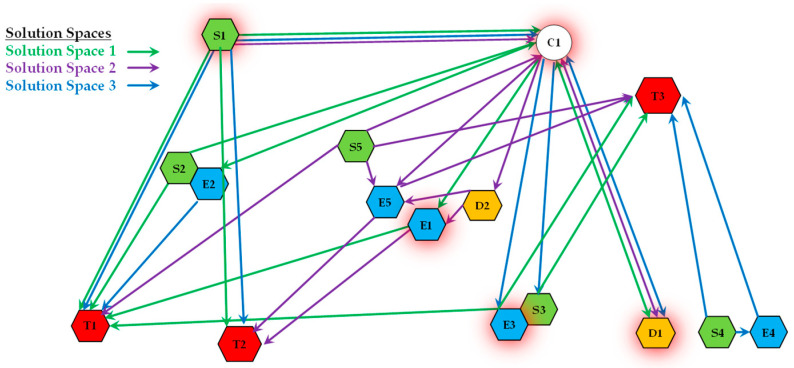 Figure 5
Figure 5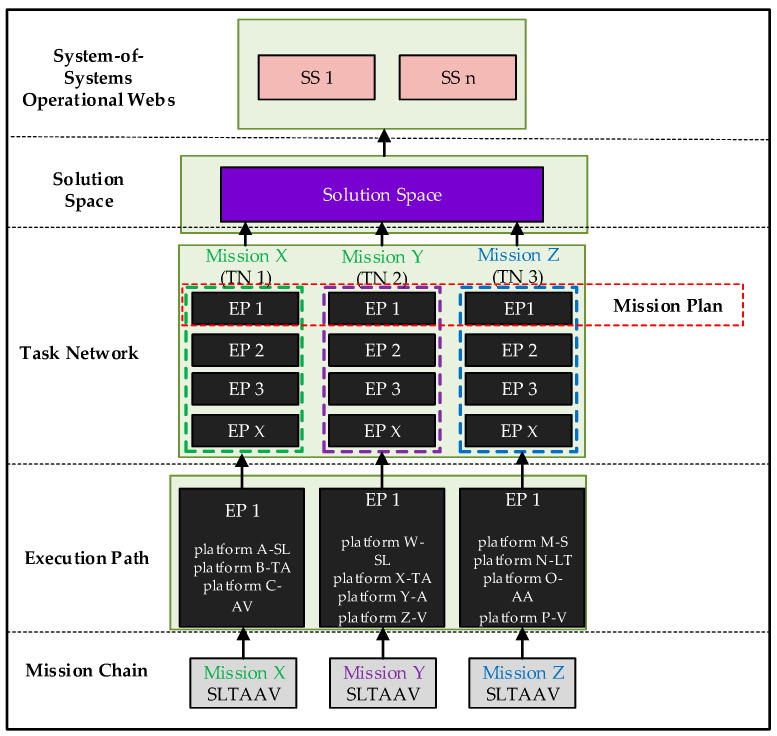 Figure 6
Figure 6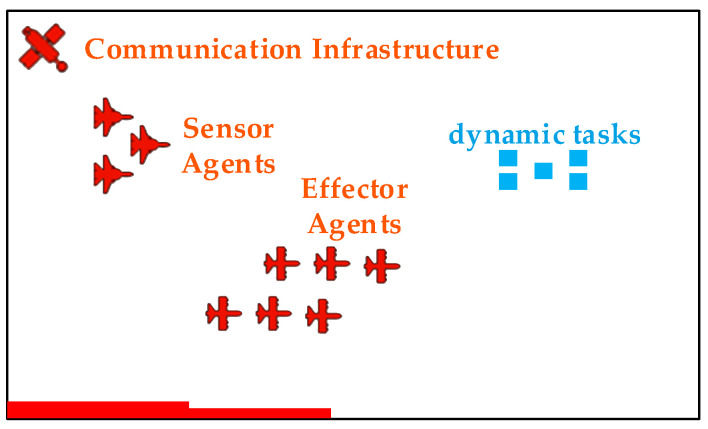 Figure 7
Figure 7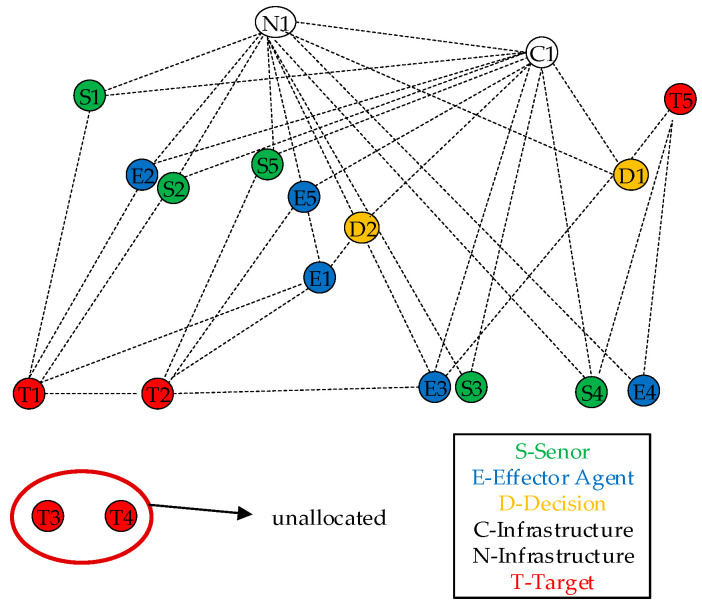 Figure 8
Figure 8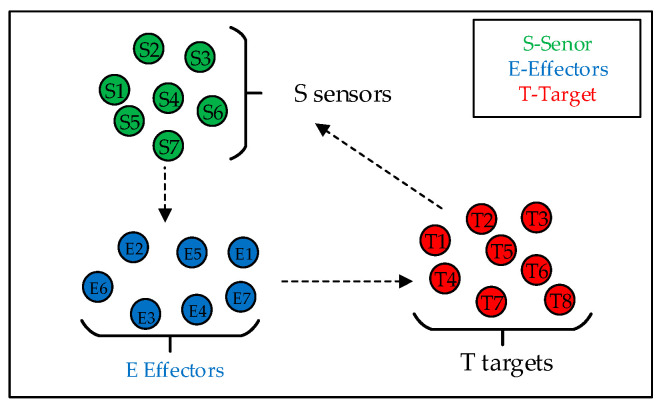 Figure 9
Figure 9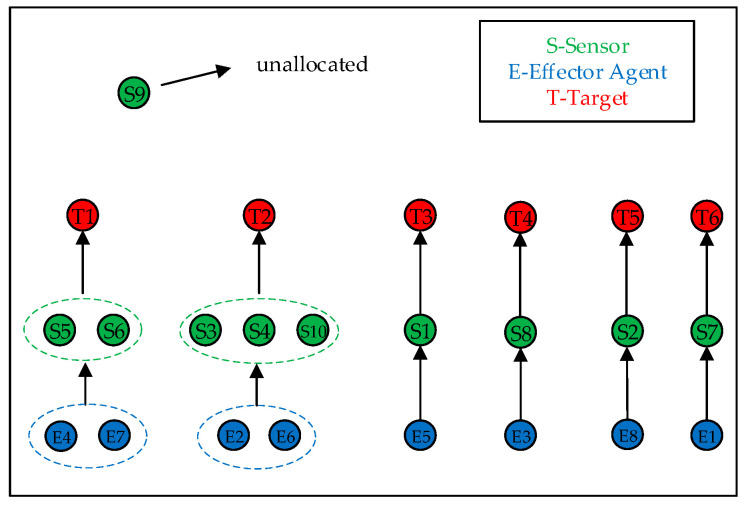 Figure 10
Figure 10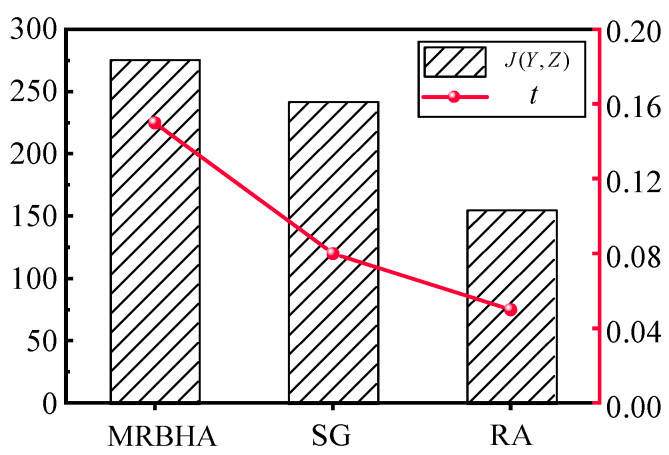 Figure 11
Figure 11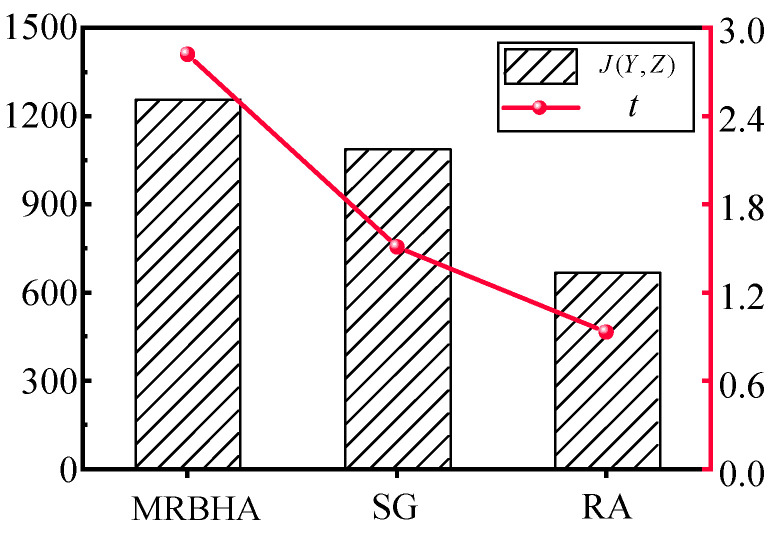 Figure 12
Figure 12Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsUAV Applications and Optimization · Distributed Control Multi-Agent Systems · Robotics and Sensor-Based Localization