A Decoupled Doppler Positioning Algorithm for Dynamic Receivers Using LEO Constellation Signals
Tianqi Liu, Yan Liu, Chenggan Wen, Yonghang Jiang, Linxiong Wang, Rong Yang, Jiong Yi

TL;DR
This paper introduces a new Doppler positioning algorithm for moving receivers using LEO satellite signals, achieving high accuracy even with no initial position information.
Contribution
A novel least-squares algorithm decouples position and velocity estimation for dynamic Doppler-based positioning with LEO satellites.
Findings
The proposed algorithm achieves meter-level position accuracy in dynamic scenarios.
Velocity estimation reaches decimeter-per-second accuracy under high-speed motion.
The method works robustly from a zero initial state.
Abstract
The advancement of low-earth-orbit (LEO) communication constellations has revitalized interest in Doppler-based positioning. However, conventional Doppler positioning algorithms struggle with dynamic receivers under unknown initial states due to the inherent nonlinearity of the observation model. To address this challenge, we propose an improved least-squares-based algorithm that decouples the estimation of position and velocity, enabling robust positioning from a zero initial state. Simulation results demonstrate that the proposed method achieves meter-level positioning accuracy and decimeter-per-second velocity accuracy under various dynamic scenarios, including high-speed motion. This approach establishes a viable framework for real-time navigation in GNSS-challenged environments using LEO signals.
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
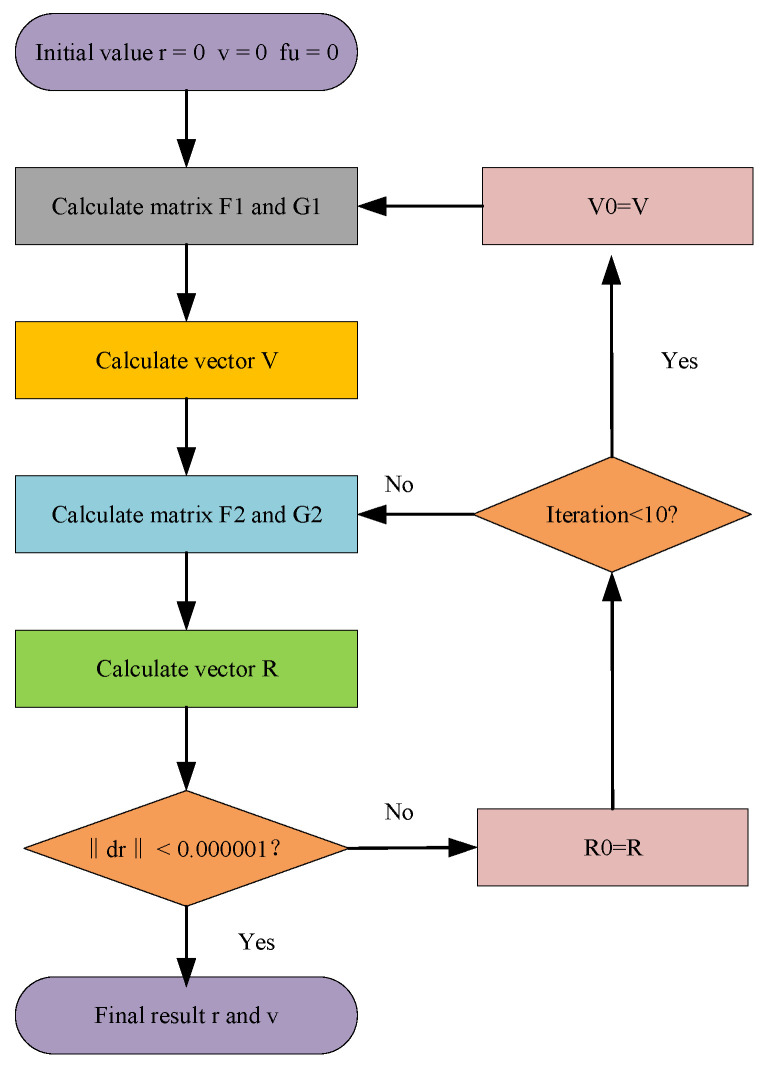 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9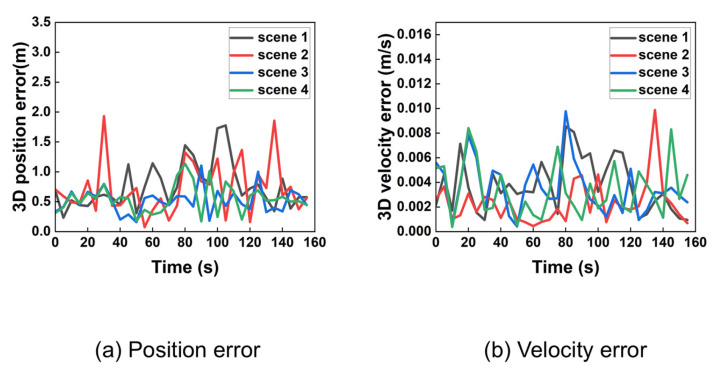 Figure 10
Figure 10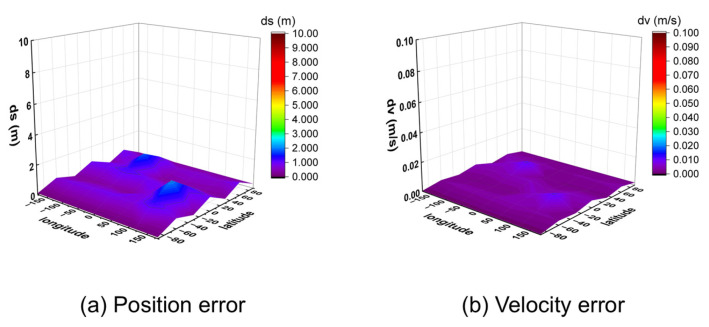 Figure 11
Figure 11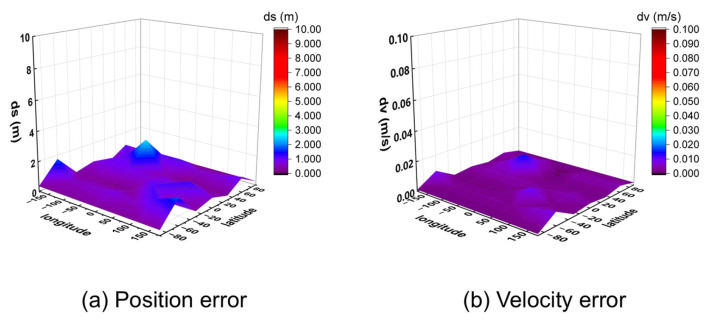 Figure 12
Figure 12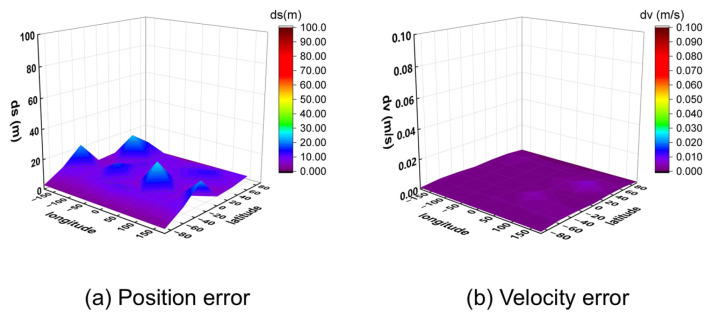 Figure 13
Figure 13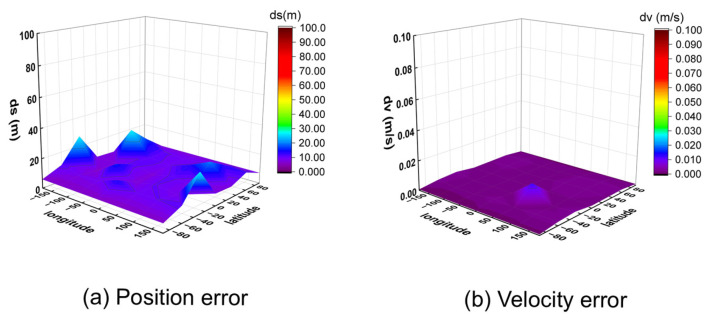 Figure 14
Figure 14Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsGNSS positioning and interference · Indoor and Outdoor Localization Technologies · Inertial Sensor and Navigation