Development of Control Algorithms for an Adaptive Running Platform for a Musculoskeletal Rehabilitation System
Artem Obukhov, Andrey Volkov

TL;DR
This paper compares different control systems for adaptive treadmills used in musculoskeletal rehabilitation to improve user comfort and stability.
Contribution
The study experimentally identifies optimal control functions and hardware configurations for adaptive rehabilitation treadmills.
Findings
Linear control function with virtual reality trackers and PID with computer vision systems provided optimal performance.
Minimum permissible working area length for treadmill platforms was determined to enhance user comfort.
A unified quality control criterion was proposed to evaluate treadmill performance.
Abstract
An essential component of modern musculoskeletal rehabilitation systems is treadmills of various sizes, the control of which may rely either on manual adjustment of treadmill speed, fixed for the entire training session, or on automatic regulation based on analysis of the user’s movements and velocity. The aim of this study was to experimentally compare the control functions of an adaptive treadmill designed for musculoskeletal rehabilitation and to assess the influence of the hardware configuration and tracking systems on user stability and the smoothness of transient processes. Two running platforms (of different lengths, one equipped with handrails and one without), two tracking systems (virtual reality trackers and a computer vision system using the MediaPipe Pose model), and three control functions—linear, nonlinear, and proportional-integral-derivative (PID)—were investigated. A…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
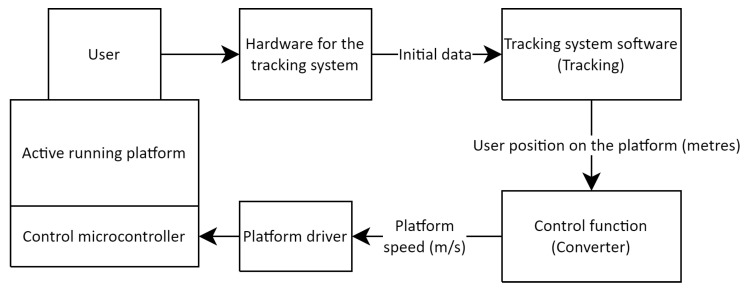 Figure 1
Figure 1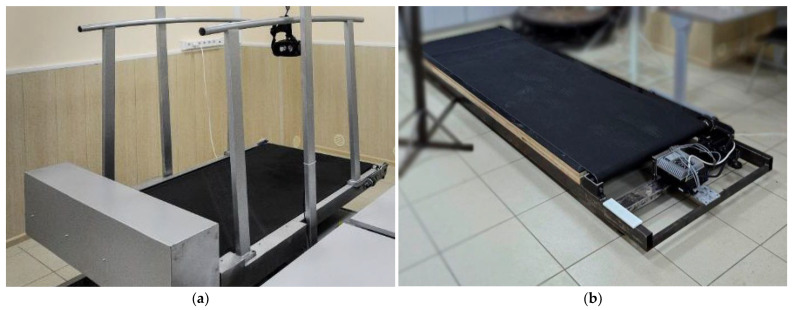 Figure 2
Figure 2 Figure 3
Figure 3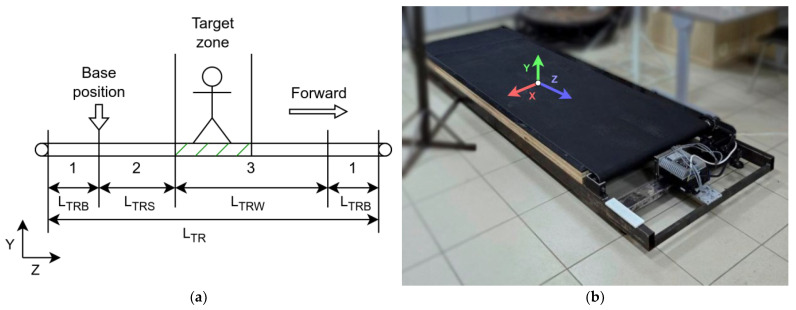 Figure 4
Figure 4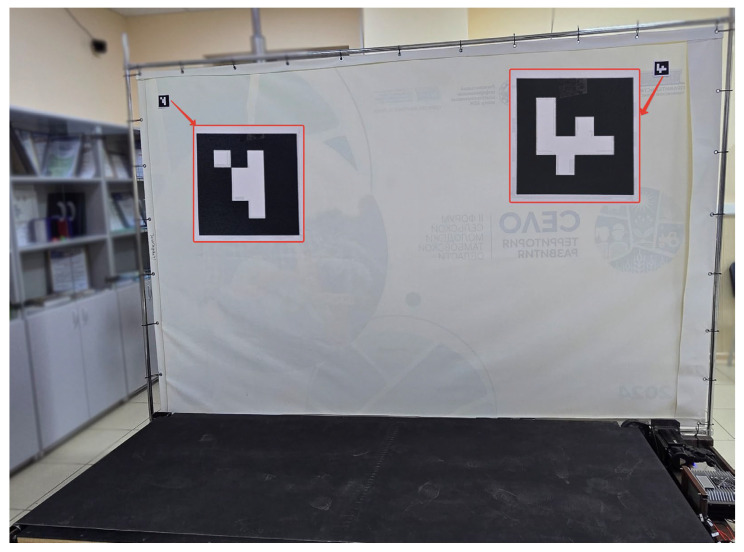 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13 Figure 14
Figure 14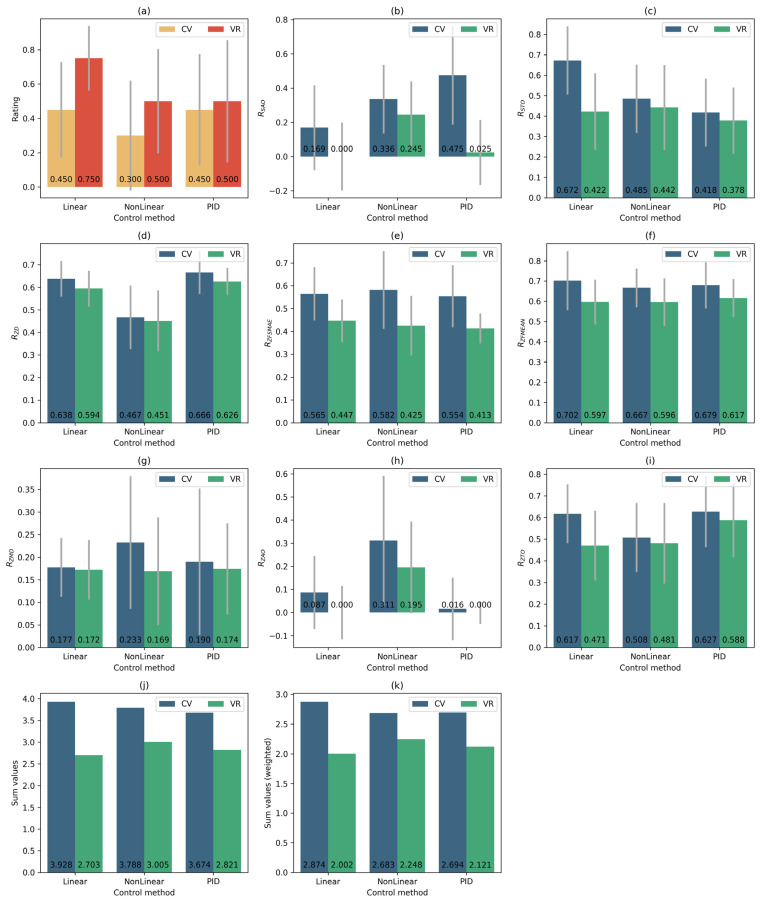 Figure 15
Figure 15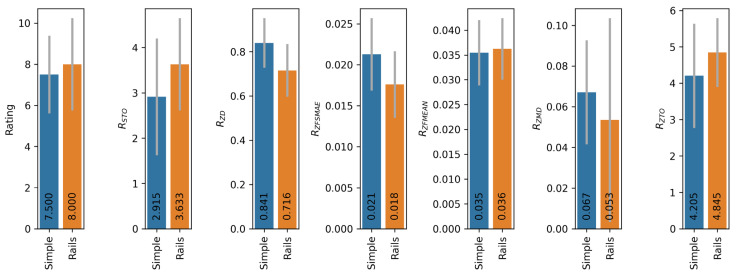 Figure 16
Figure 16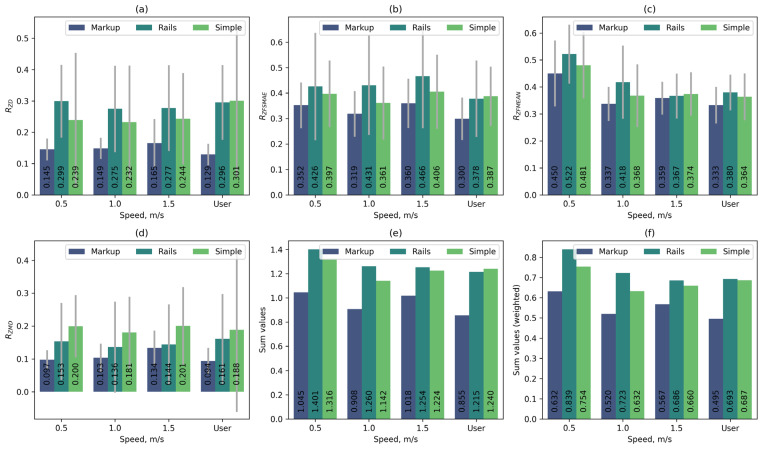 Figure 17
Figure 17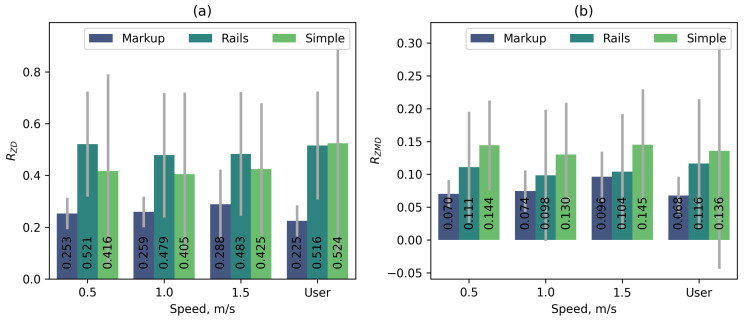 Figure 18
Figure 18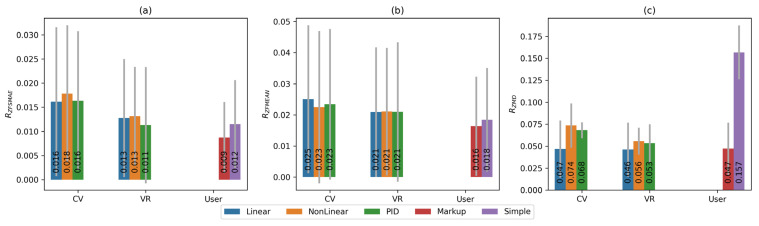 Figure 19
Figure 19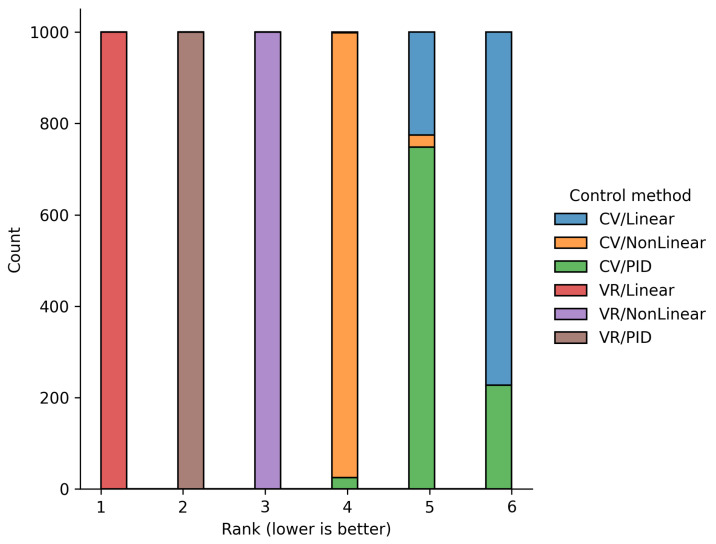 Figure 20
Figure 20Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsStroke Rehabilitation and Recovery · Balance, Gait, and Falls Prevention · Prosthetics and Rehabilitation Robotics