Indoor Object Measurement Through a Redundancy and Comparison Method
Pedro Faria, Tomás Simões, Tiago Marques, Peter D. Finn

TL;DR
This paper presents a new method for accurately measuring indoor objects using smartphone cameras by leveraging geometry and architectural patterns.
Contribution
The novel framework uses redundancy and proportional laws to enable accurate spatial measurements without specialized hardware.
Findings
The model achieved a mean average precision (mAP@50) of 0.995 and high precision and recall values.
The redundancy correction method reduced distance deviation errors to approximately 10%.
The framework enables on-device, offline spatial measurement using only 2D visual input.
Abstract
Accurate object detection and measurement within indoor environments—particularly unfurnished or minimalistic spaces—pose unique challenges for conventional computer vision methods. Previous research has been limited to small objects that can be fully detected by applications such as YOLO, or to outdoor environments where reference elements are more abundant. However, in indoor scenarios with limited detectable references—such as walls that exceed the camera’s field of view—current models exhibit difficulties in producing complete detections and accurate distance estimates. This paper introduces a geometry-driven, redundancy-based framework that leverages proportional laws and architectural heuristics to enhance the measurement accuracy of walls and spatial divisions using standard smartphone cameras. The model was trained on 204 labeled indoor images over 25 training iterations (500…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
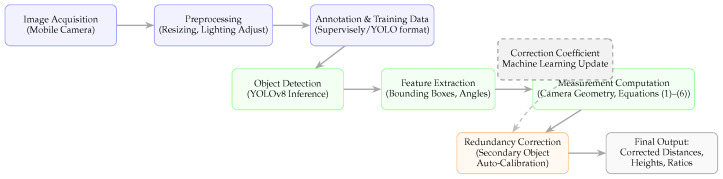 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7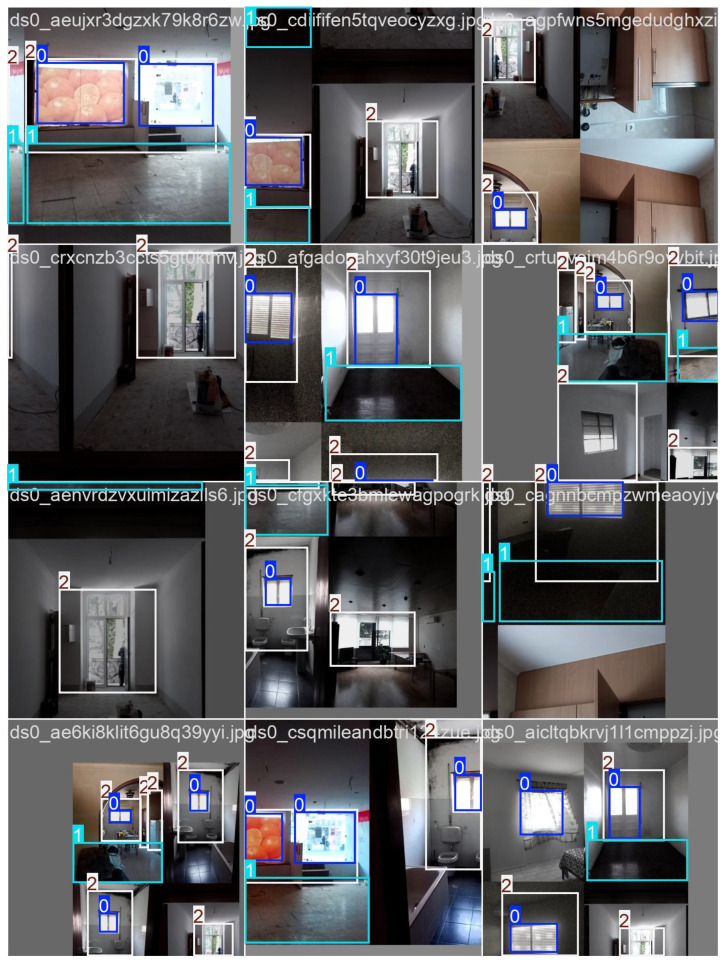 Figure 8
Figure 8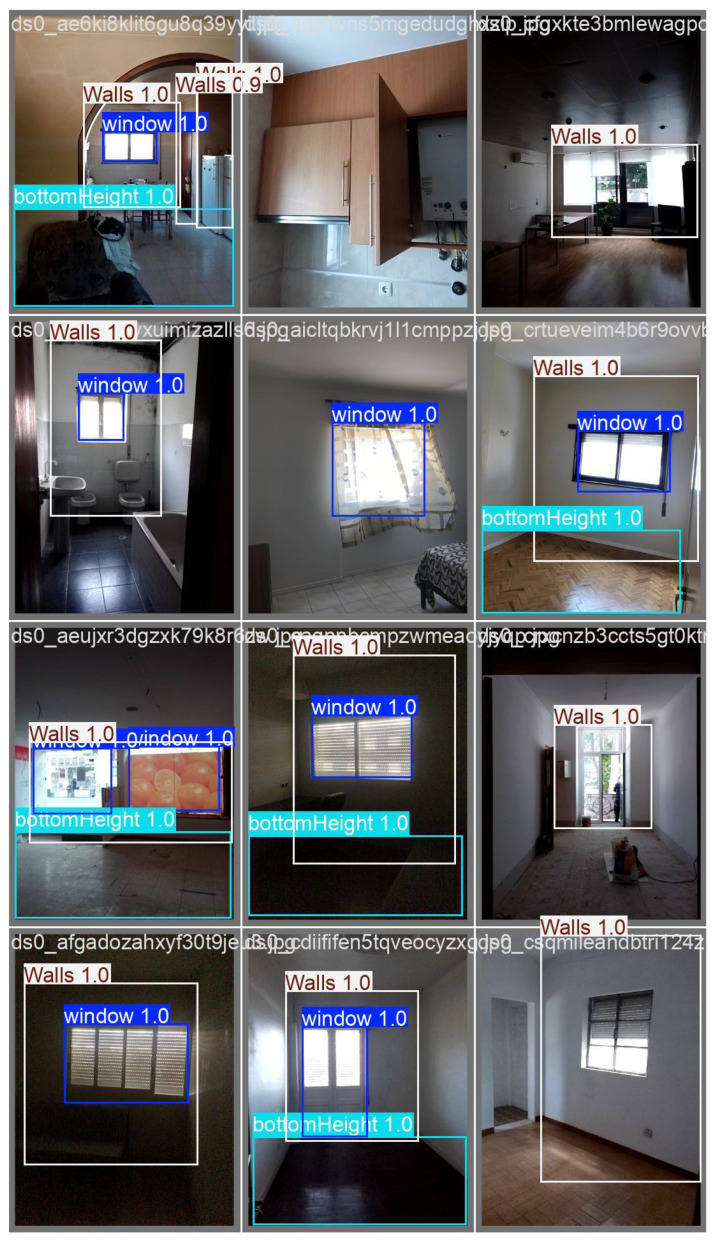 Figure 9
Figure 9 Figure 10
Figure 10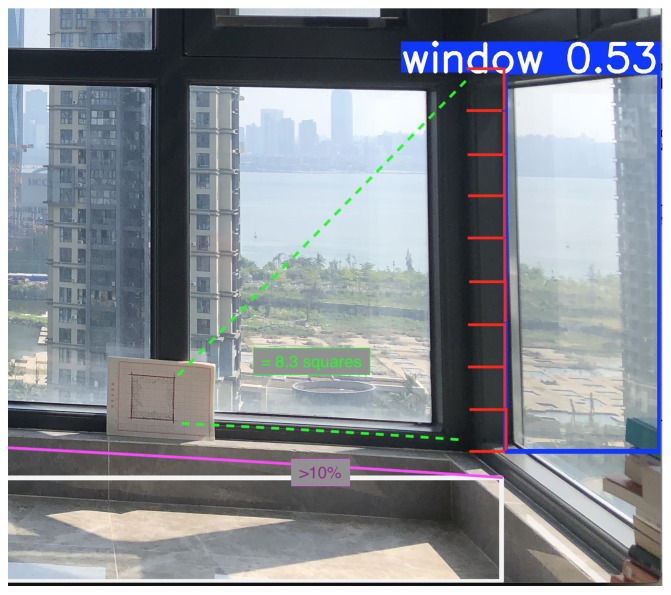 Figure 11
Figure 11Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsRobotics and Sensor-Based Localization · 3D Surveying and Cultural Heritage · Infrastructure Maintenance and Monitoring