Traversal by Touch: Tactile-Based Robotic Traversal with Artificial Skin in Complex Environments
Adam Mazurick, Alex Ferworn

TL;DR
This paper shows that robots using touch instead of vision can navigate complex environments reliably, even in total darkness.
Contribution
A tactile-first robotic control system with memory augmentation that achieves lighting-independent traversal on DHS benchmarks.
Findings
The tactile stack maintained mid-80% success across all lighting conditions, including total darkness.
The memory-augmented tactile policy (M3) showed consistent robustness compared to the camera baseline.
Tactile-first traversal is invariant to illumination and texture, making it suitable for dark or confined environments.
Abstract
We evaluate tactile-first robotic traversal on the Department of Homeland Security (DHS) figure-8 mobility test using a two-way repeated-measures design across various algorithms (three tactile policies—M1 reactive, M2 terrain-weighted, M3 memory-augmented; a monocular camera baseline, CB-V; a tactile histogram baseline, T-VFH; and an optional tactile-informed replanner, T-D* Lite) and lighting conditions (Indoor, Outdoor, and Dark). The platform is the custom-built Eleven robot—a quadruped integrating a joint-mounted tactile tentacle with a tip force-sensitive resistor (FSR; Walfront 9snmyvxw25, China; 0–10 kg range, ≈0.1 N resolution @ 83 Hz) and a woven Galvorn carbon-nanotube (CNT) yarn for proprioceptive bend sensing. Control and sensing are fully wireless via an ESP32-S3, Arduino Nano 33 BLE, Raspberry Pi 400, and a mini VESC controller. Across 660 trials, the tactile stack…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
 Figure 1
Figure 1 Figure 2
Figure 2 Figure 3
Figure 3 Figure 4
Figure 4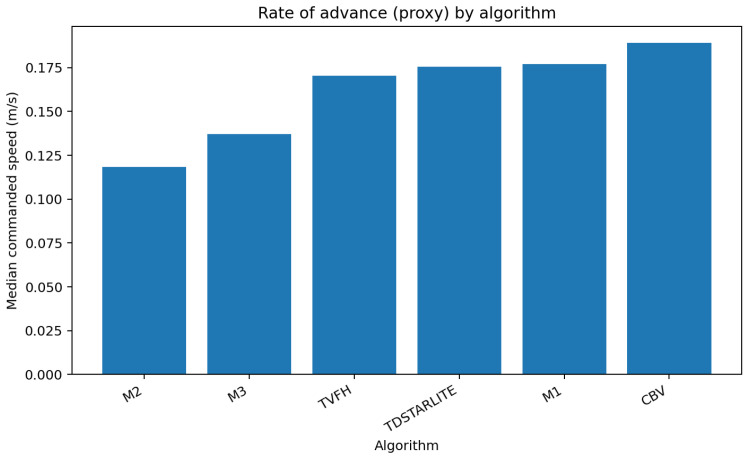 Figure 5
Figure 5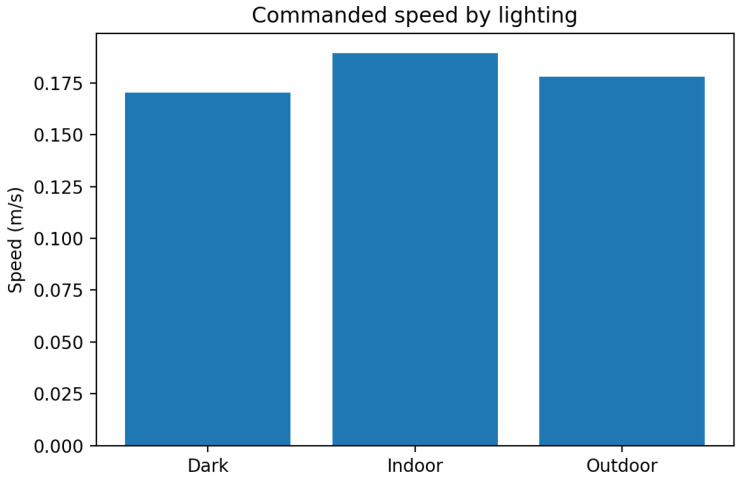 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8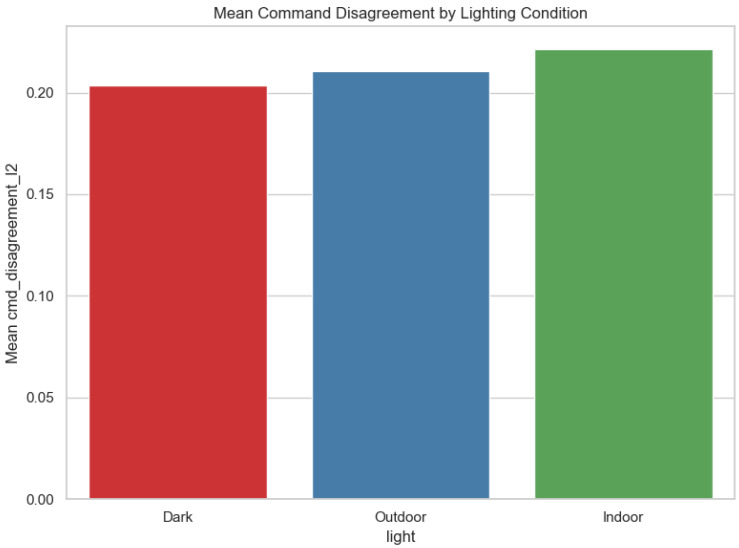 Figure 9
Figure 9 Figure 10
Figure 10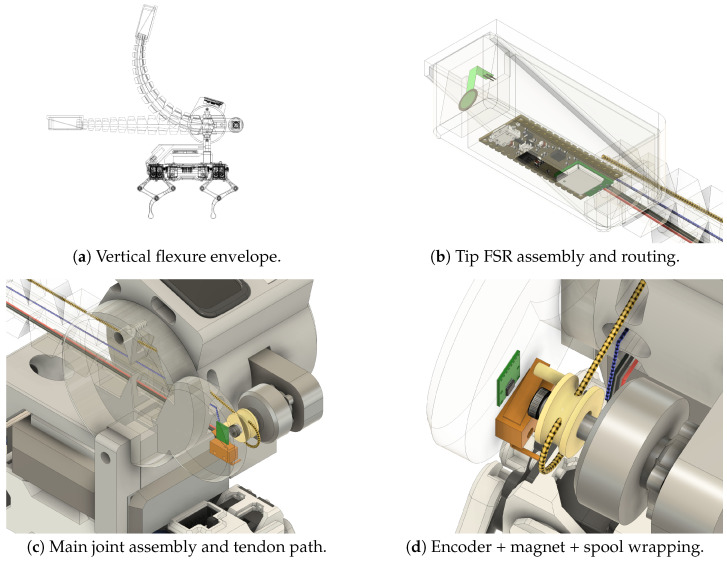 Figure 11
Figure 11Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsAdvanced Sensor and Energy Harvesting Materials · Tactile and Sensory Interactions · Soft Robotics and Applications