Extended State Observer-Based Chattering Free Terminal Sliding-Mode Control of Hydraulic Manipulators
Han Gao, Jingran Ma, Yanjun Liu, Gang Xue

TL;DR
This paper introduces a new control method for hydraulic manipulators that improves tracking performance while avoiding system disturbances and chattering.
Contribution
A novel chattering-free terminal sliding-mode control scheme using an extended state observer for hydraulic manipulators is proposed.
Findings
The proposed ESO-CFTSM control scheme effectively handles uncertainties and unknowns in electro-hydraulic systems.
Simulation results show superior trajectory tracking performance without chattering.
The control law avoids singularities and ensures finite-time stability.
Abstract
High-performance tracking control for the hydraulic manipulator should address the challenges of the uncertainties and unknowns associated with the electro-hydraulic servo system (EHSS). This paper presents an extended state observer-based chattering-free terminal sliding-mode (ESO-CFTSM) control scheme for hydraulic manipulators. A third-order integral chain model is developed to characterize the system dynamics, where uncertainties and unknowns are considered as disturbances and estimated by the ESO. Meanwhile, a full-order TSM manifold is designed to stabilize the closed-loop system in finite-time. For this proposed scheme, the feedforward compensation of disturbances is introduced in the equivalent control law. Furthermore, the composite reaching law and a low-pass filter are used to realize the chattering-free control. The singularity is avoided because there are no derivatives of…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
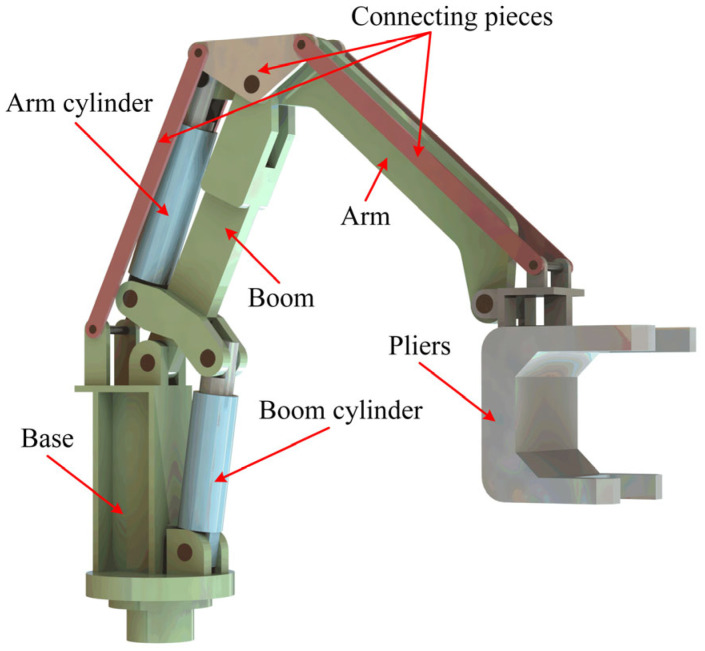 Figure 1
Figure 1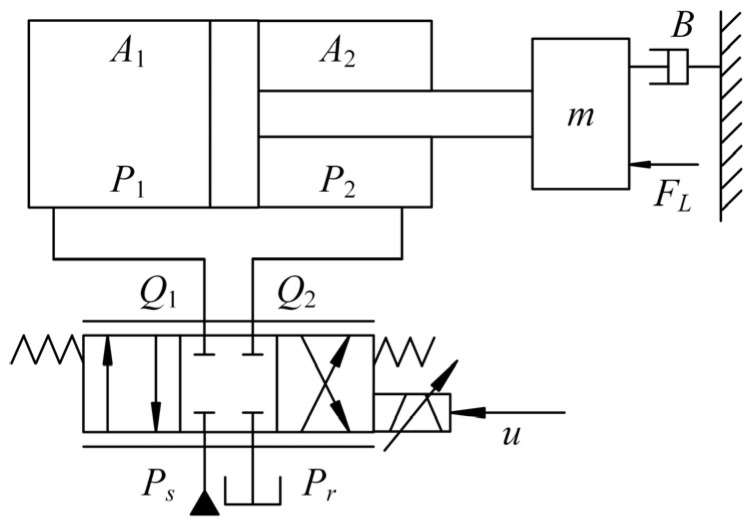 Figure 2
Figure 2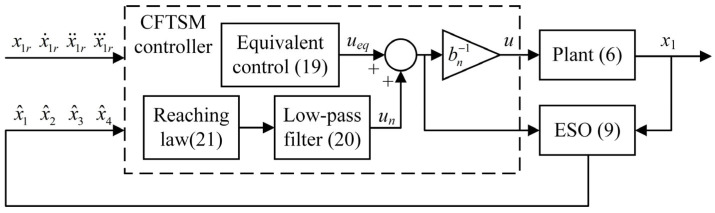 Figure 3
Figure 3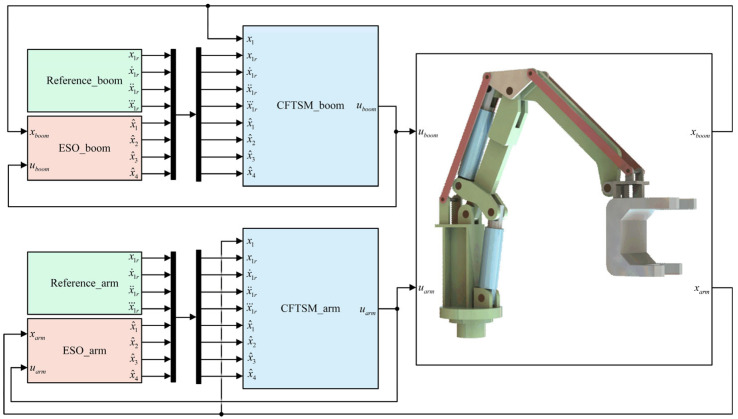 Figure 4
Figure 4 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8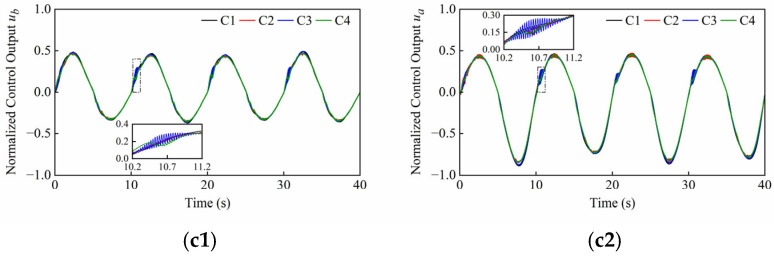 Figure 9
Figure 9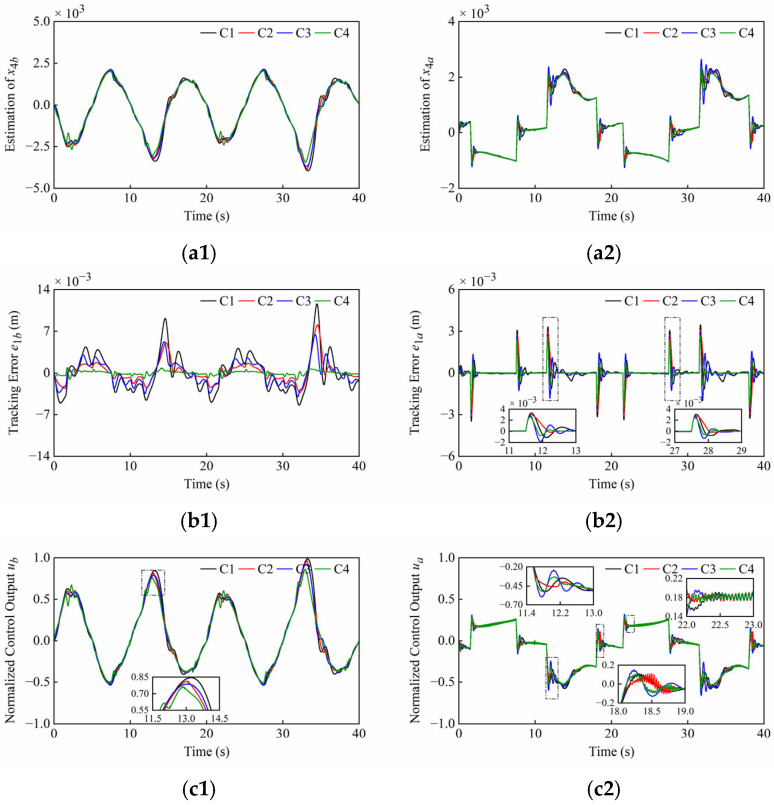 Figure 10
Figure 10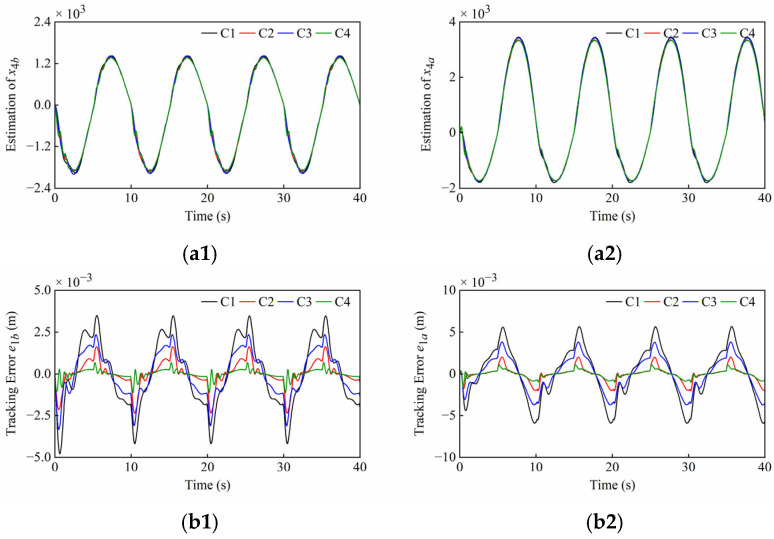 Figure 11
Figure 11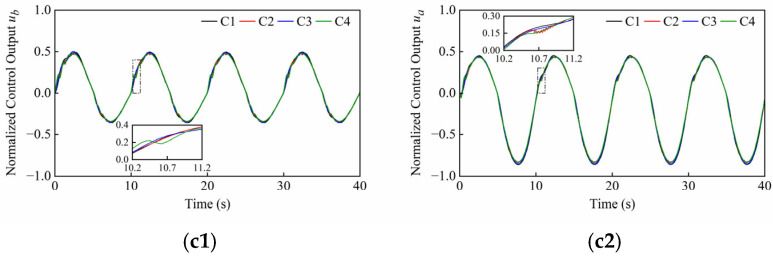 Figure 12
Figure 12 Figure 13
Figure 13Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsHydraulic and Pneumatic Systems · Adaptive Control of Nonlinear Systems · Dynamics and Control of Mechanical Systems