Optimal Sequential Fusion Kalman Filter for Multi-Sensor Linear Systems with Noise Cross-Correlated
Weichang Huang, Chenglin Wen

TL;DR
This paper introduces a new sequential fusion Kalman filter for multi-sensor systems with correlated noise, ensuring optimal performance.
Contribution
The paper proposes a globally optimal sequential fusion filter that is strictly equivalent to the centralized fusion Kalman filter.
Findings
An innovative method is introduced to decorrelate process noise from measurement noise.
Measurement equations are rewritten using Gram–Schmidt orthogonalization to achieve noise independence.
The proposed filter is tested on a target tracking problem and shown to be effective.
Abstract
For the state estimation problem of multi-sensor linear systems with noise cross-correlated, where process noise correlates with measurement noise and measurement noises are mutually correlated, researchers have long attempted to design a sequential fusion Kalman filter that is strictly equivalent to the centralized fusion Kalman filter. To the best of our knowledge, this problem has remained unsolved. To this end, this paper designs a truly globally optimal sequential fusion filter suitable for such systems. First, an innovative method is proposed to indirectly decorrelate process noise from all measurement noise, addressing the challenge of their direct decorrelation. Then, the measurement equations are equivalently rewritten based on the Gram–Schmidt orthogonalization principle so that mutual independence among the noises is achieved. Next, a sequential fusion Kalman filter is…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
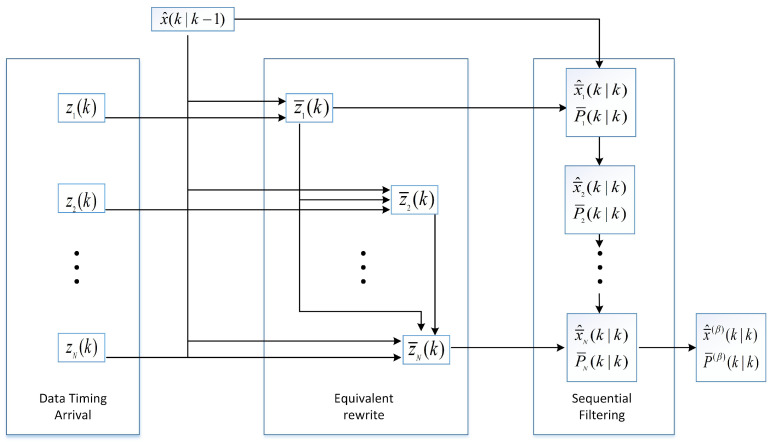 Figure 1
Figure 1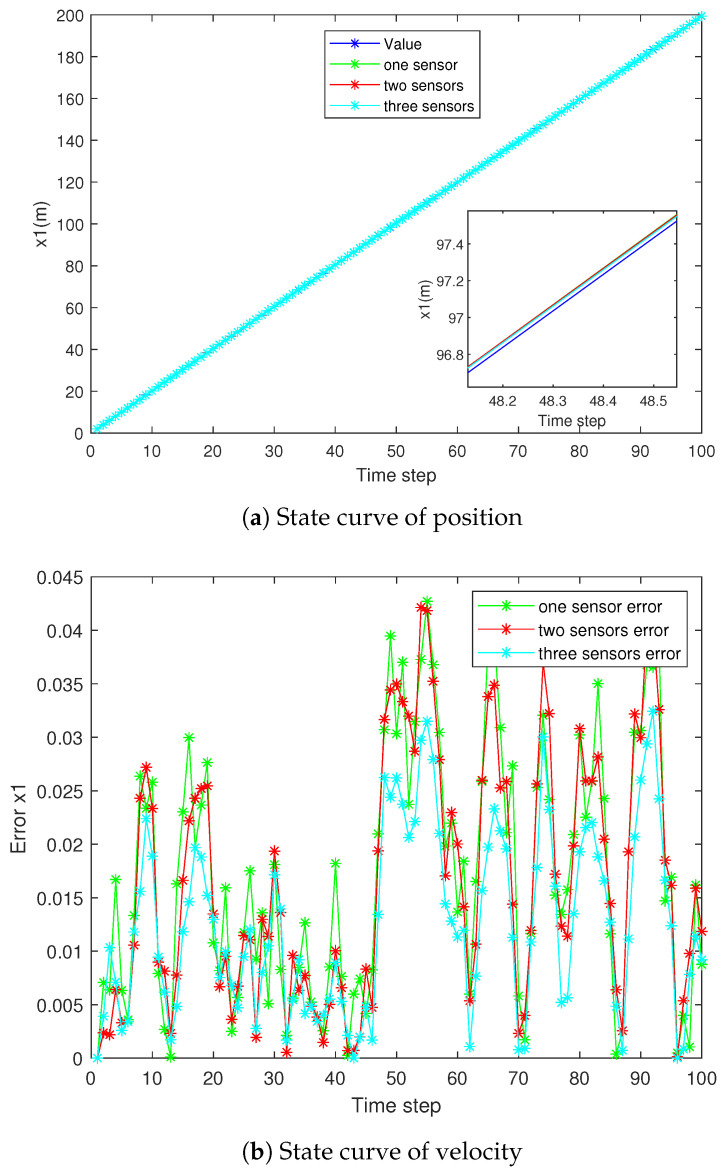 Figure 2
Figure 2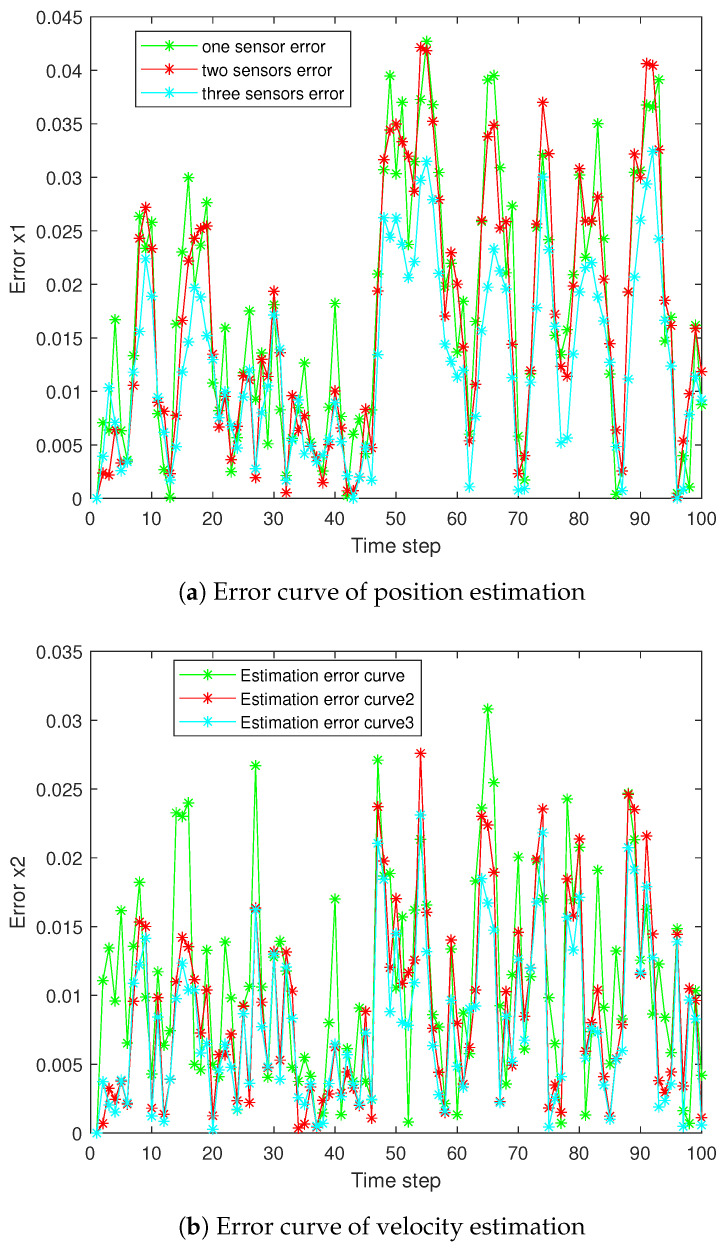 Figure 3
Figure 3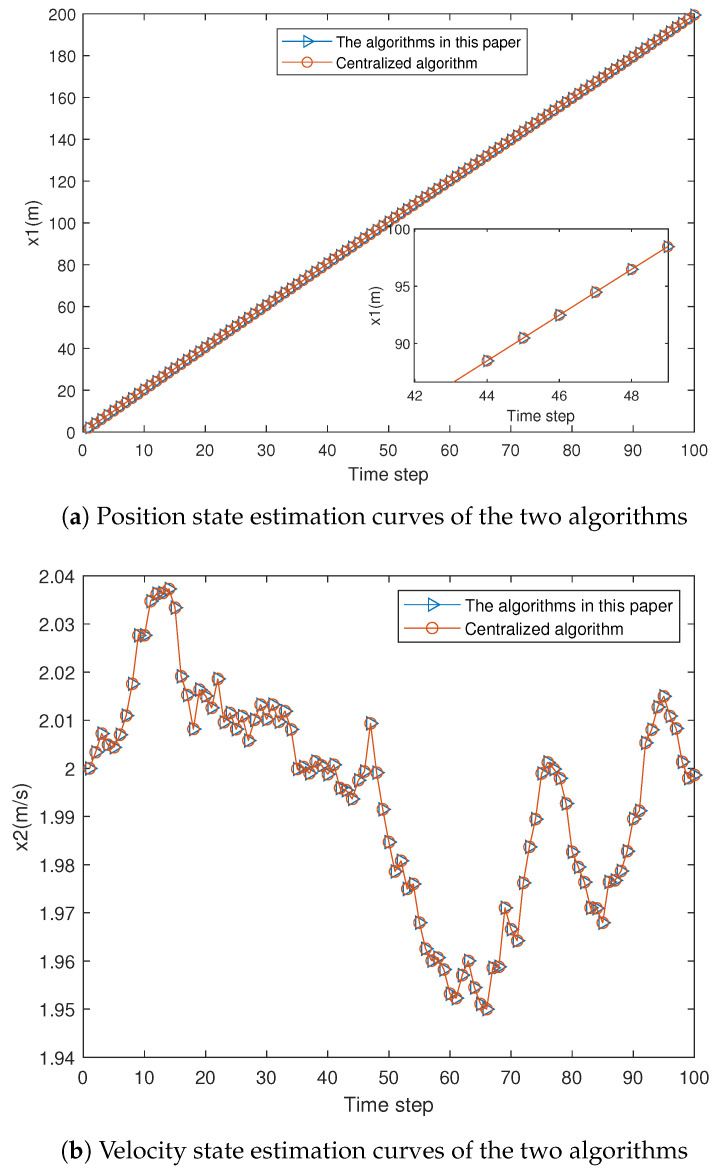 Figure 4
Figure 4Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsTarget Tracking and Data Fusion in Sensor Networks · Inertial Sensor and Navigation · Distributed Sensor Networks and Detection Algorithms