A Scheme for System Error Calibration and Compensation of the Initial State of MEMS Inertial Navigation
Xiangru Ding, Zhaobing Chen, Zhaolong Wu, Xiushuo Wang

TL;DR
This paper introduces a cost-effective method to improve the accuracy of MEMS inertial navigation systems by calibrating and compensating for initial errors without expensive equipment.
Contribution
A novel twelve-position dual-axis calibration method that achieves high accuracy and reduces reliance on three-axis turntables.
Findings
Installation error calibration accuracy reaches 0.03°, a 25% improvement over traditional methods.
Navigation error is reduced by 90% within one hour, with initial error ≤ 1 μrad.
The method enables multi-error calibration while addressing the cost–accuracy trade-off.
Abstract
Aiming at the challenge of balancing the accuracy and cost of the initial state calibration of traditional MEMS inertial navigation systems, as well as the current situation of the lack of high-precision three-axis turntables in engineering practice, this paper proposes a practical and innovative systematic error calibration and compensation scheme, which effectively suppresses the deterministic errors of MEMS-INS and enhances its applicability in high-precision and long-duration tasks. By analyzing the coordinate transformation characteristics of the MEMS-INS solution process under small-angle disturbances, a deterministic error model based on the device’s zero bias, scale factor, and cross-coupling errors is constructed. A twelve-position dual-axis calibration method, combined with a high-precision orthogonal fixture, is designed to excite errors on a dual-axis turntable, converting…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
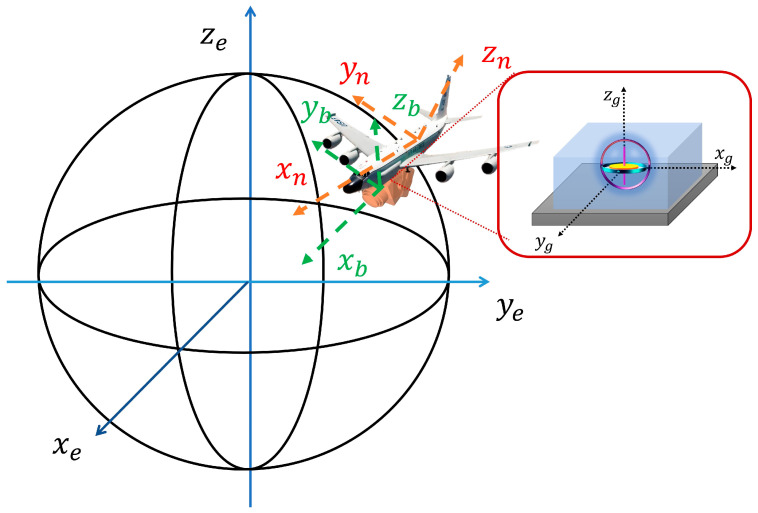 Figure 1
Figure 1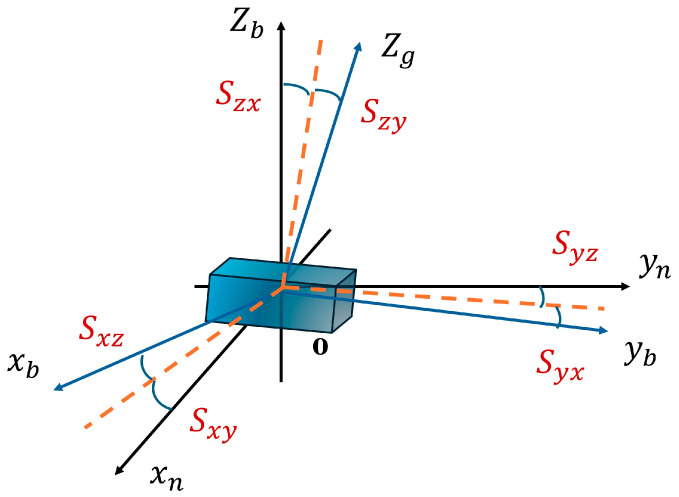 Figure 2
Figure 2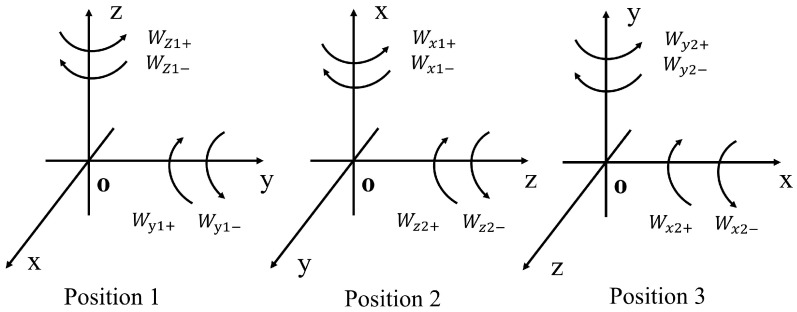 Figure 3
Figure 3 Figure 4
Figure 4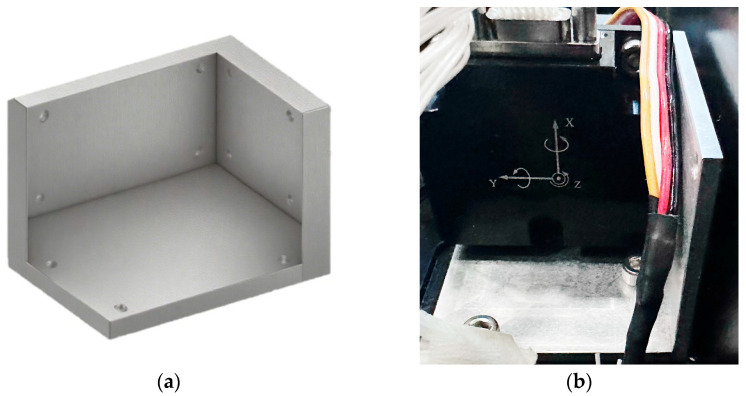 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsInertial Sensor and Navigation · Advanced Control and Stabilization in Aerospace Systems · Advanced Measurement and Metrology Techniques