Improved Robust Model Predictive Trajectory Tracking Control for Intelligent Vehicles Based on Multi-Cell Hyperbody Vertex Modeling and Double-Layer Optimization
Xiaoyu Wang, Guowei Dou, Te Chen, Jiankang Lu

TL;DR
This paper introduces a robust control method for vehicle trajectory tracking that improves performance in the presence of model parameter changes.
Contribution
The novel approach combines multi-cell hyperbody vertex modeling with double-layer optimization to enhance robustness in vehicle control.
Findings
RMPC reduces peak lateral deviation from 1.0 m to 0.2 m in complex road conditions.
The method converges heading deviation to within 2 degrees and reduces control errors compared to traditional MPC.
Abstract
Aiming at the problem of model parameter perturbation in vehicle trajectory tracking control, an improved robust model predictive control (RMPC) method is proposed. Based on the two-degree-of-freedom vehicle model and Serret Frenet error model, a multi-cell hypercube vertex modeling is adopted to map the disturbance range of parameters such as vehicle speed and lateral stiffness to a set of vertices, and dynamic linear combination is achieved through normalized weights. The algorithm design mainly focuses on the dual-layer optimization of the switching mechanism, decomposing the infinite time domain problem into finite time domain optimization and terminal constraints. At the same time, it dynamically updates the vertex parameters to match time-varying uncertainties and then combines Lyapunov theory to design a control invariant set. The results show that in complex road conditions and…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
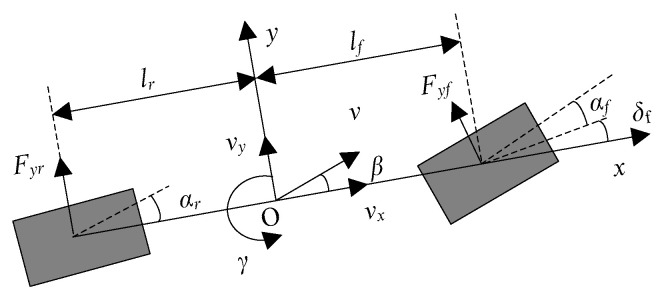 Figure 1
Figure 1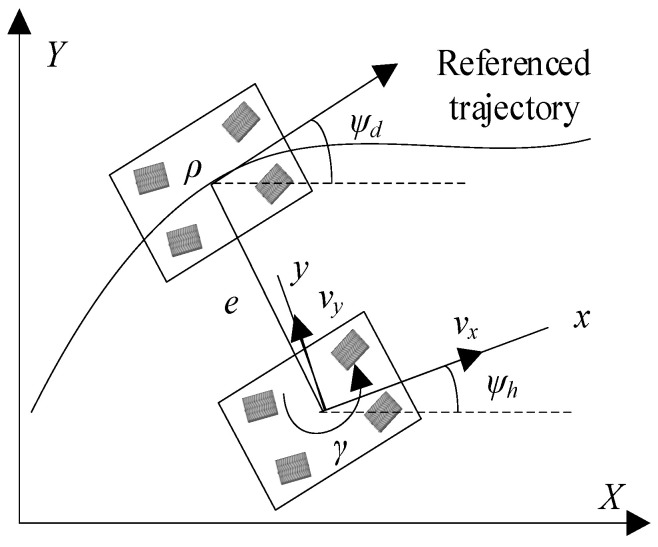 Figure 2
Figure 2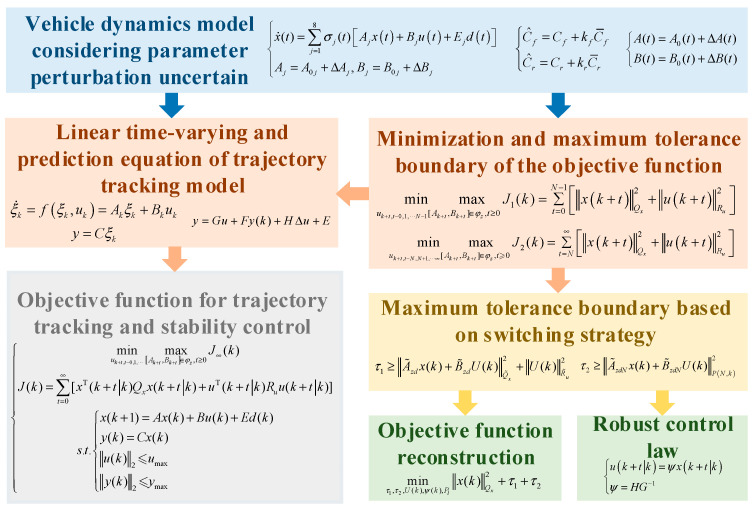 Figure 3
Figure 3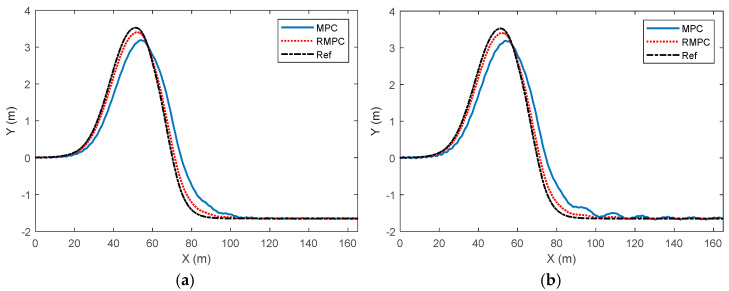 Figure 4
Figure 4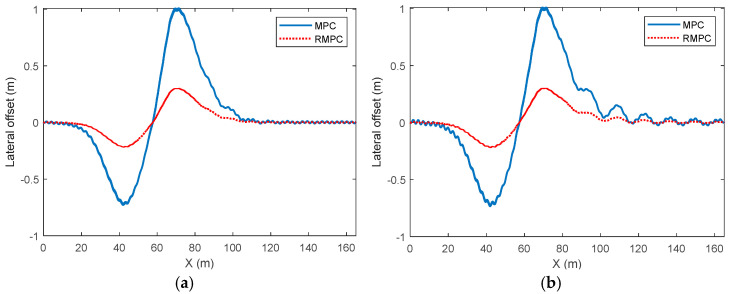 Figure 5
Figure 5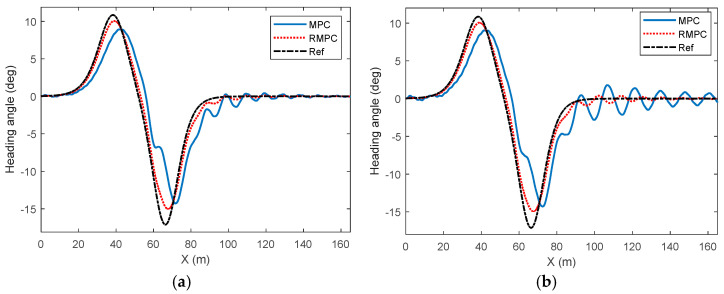 Figure 6
Figure 6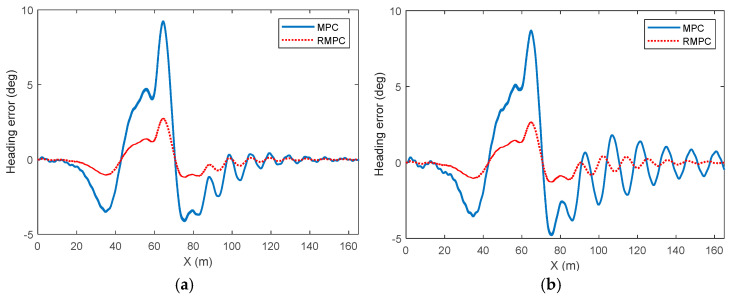 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9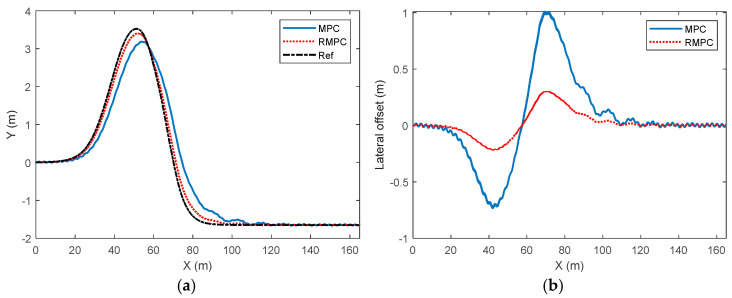 Figure 10
Figure 10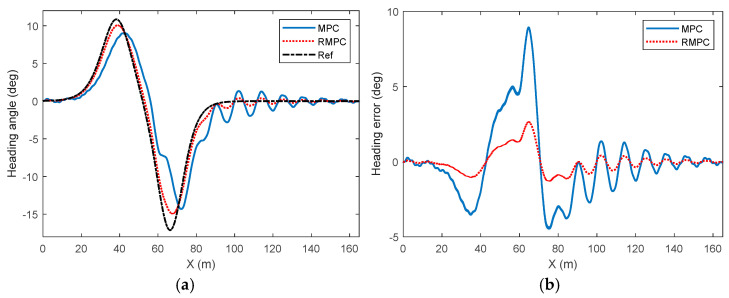 Figure 11
Figure 11 Figure 12
Figure 12Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsIndustrial Technology and Control Systems · Vehicle Dynamics and Control Systems · Simulation and Modeling Applications