VIPE: Visible and Infrared Fused Pose Estimation Framework for Space Noncooperative Objects
Zhao Zhang, Dong Zhou, Yuhui Hu, Weizhao Ma, Guanghui Sun, Yuekan Zhang

TL;DR
This paper introduces a new framework for estimating the pose of non-cooperative space objects using fused visible and infrared images.
Contribution
The novel VIPE framework fuses visible and infrared images for improved pose estimation in space environments.
Findings
VIPE outperforms existing monocular methods in complex space environments.
The BVPE dataset with 3,630 image pairs supports research in bimodal pose estimation.
Abstract
Accurate pose estimation of non-cooperative space objects is crucial for applications such as satellite maintenance, space debris removal, and on-orbit assembly. However, monocular pose estimation methods face significant challenges in environments with limited visibility. Different from the traditional pose estimation methods that use images from a single band as input, we propose a novel deep learning-based pose estimation framework for non-cooperative space objects by fusing visible and infrared images. First, we introduce an image fusion subnetwork that integrates multi-scale features from visible and infrared images into a unified embedding space, preserving the detailed features of visible images and the intensity information of infrared images. Subsequently, we design a robust pose estimation subnetwork that leverages the rich information from the fused images to achieve accurate…
Genes, proteins, chemicals, diseases, species, mutations and cell lines named across the full text — each resolved to its canonical identifier and authoritative record.
Click any figure to enlarge with its caption.
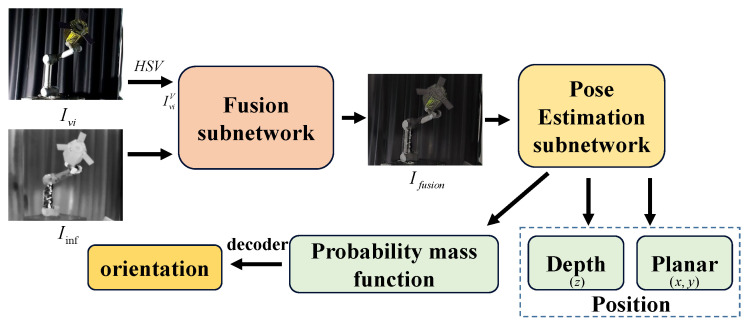 Figure 1
Figure 1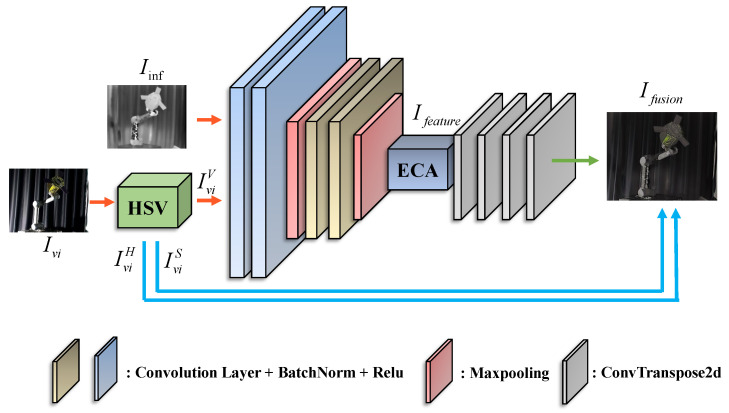 Figure 2
Figure 2 Figure 3
Figure 3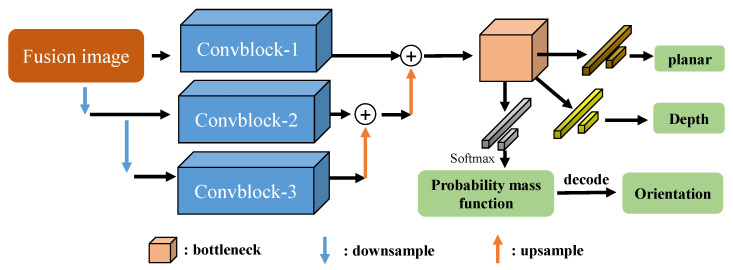 Figure 4
Figure 4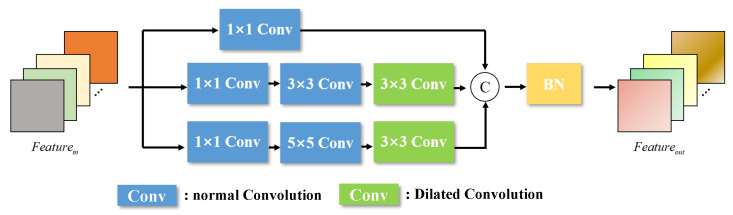 Figure 5
Figure 5 Figure 6
Figure 6 Figure 7
Figure 7 Figure 8
Figure 8 Figure 9
Figure 9 Figure 10
Figure 10 Figure 11
Figure 11 Figure 12
Figure 12 Figure 13
Figure 13 Figure 14
Figure 14 Figure 15
Figure 15 Figure 16
Figure 16Peer Reviews
No public reviews on file for this paper yet. If you reviewed it on a platform where reviews are public (OpenReview, ICLR, NeurIPS, ICML), you can paste yours below so the community can read it here.
Videos
No videos yet. Explain this paper in a talk, walkthrough, or lecture? Add one.
Taxonomy
TopicsSpace Satellite Systems and Control · Robotics and Sensor-Based Localization · Spacecraft Dynamics and Control